Материал: GqnnD90jyV
16
Точность определения (1σ) смещений нулей, масштабных коэффициентов и углов отклонения измерительных осей находится на уровне соответственно 0,001 °/ч, 5 10 5 %, 0,1 угл. с – для ВОГ и 5 10 6 м/с², 3 10 5 %, 0,3 угл.с – для акселерометров. Данный уровень погрешностей калибровки подтверждается как анализом работы ковариационного канала, так и сходимостью результатов обработки данных в разных запусках системы.
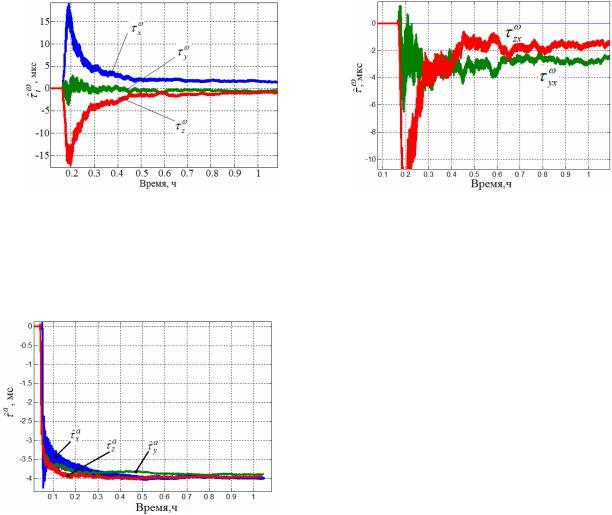
Оценки временных запаздываний i (i x, y, z) гироскопов данного образца ИМ БИНС
относительно входных воздействий для рассматриваемого случая вращения платформы стенда представлены на рис.11. При этом точность их оценивания лежит в пределах 1 мкс (1 ). После оценки временных запаздываний ВОГ относительно входных воздействий по этой же реализации уточняются временные запаздывания yx , zx относительно гироскопа
Gxb , который принимается в качестве опорного. Результаты калибровки относительных временных запаздываний гироскопов yx , zx представлены на рис.12. Как следует из рис.
12 точность оценивания относительных временных запаздываний в этом случае лучше и находится на уровне 0.2 мкс (1 ). Это обусловлено тем, что вклад относительных задержек в погрешности определения координат и составляющих вектора линейной скорости, при выбранном методе калибровки, выше, чем вклад задержек относительно входных воздействий. Правильность определения временных задержек подтверждается испытаниями при других параметрах углового движения.
Рис.11 Оценки временных запаздываний ВОГ |
|
Рис. 12 Оценки временных запаздываний |
|||||||||||
|
относительно входных воздействий |
|
|
ВОГ относительно опорного |
|||||||||
|
После |
уточнения |
относительных |
временных |
запаздываний ВОГ, |
уточнялись |
|||||||
запаздывания |
|
(i y, z) ВОГ относительно входных воздействий |
по |
формулам |
|||||||||
i |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
x |
yx |
, z |
x |
zx . |
|
Результаты оценки временных запаздываний |
||||||
|
|
|
|
|
|
ia |
|||||||
|
|
|
|
|
|
(i x, y, z) |
акселерометров |
приведены на |
|||||
|
|
|
|
|
|
рис.13. Следует заметить, что существенный |
|||||||
|
|
|
|
|
|
уровень (в мс) временных запаздываний у |
|||||||
|
|
|
|
|
|
акселерометров |
рассматриваемого образца ИМ |
||||||
|
|
|
|
|
|
БИНС обусловлен, по-видимому, ограниченной |
|||||||
|
|
|
|
|
|
полосой их пропускания. При существующей |
|||||||
|
|
|
|
|
|
полосе |
пропускания |
акселерометров около |
|||||
|
|
|
|
|
|
80 Гц, |
групповое |
запаздывание |
должно |
||||
|
|
|
|
|
|
составлять несколько тысячных долей секунды. |
|||||||
|
Рис. 13Оценки временных |
Практическое |
совпадение временных |
задержек |
|||||||||
|
говорит о том, что основной причиной является |
||||||||||||
|
запаздываний акселерометров |
именно групповое запаздывание. |
|
|
|||||||||
17
Оценка эффективности предложенного метода калибровки осуществлялась с помощью камеральной обработки в пакете прикладных программ MATLAB (Simulink) реальных данных стендовых испытаний различных образцов ИМ, с учетом найденных коэффициентов моделей погрешностей ЧЭ. При этом оценивались погрешности вырабатываемых БИНС навигационных параметров в автономном режиме.
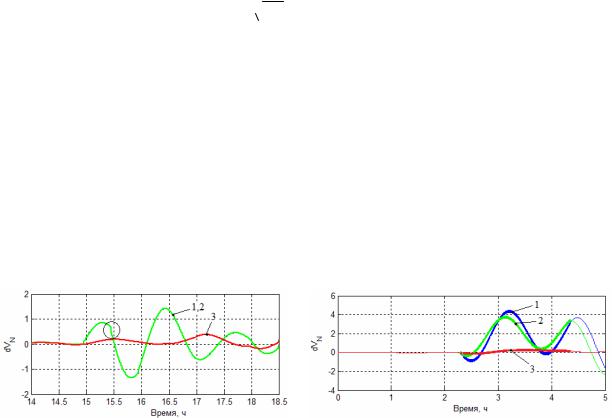
Остаточная погрешность калибровки акселерометров a определялась по амплитуде шулеровских колебаний в погрешности определения скорости V после наклона ИМ в соответствии с формулой V a / g 
 Rg sin vшt , где R – радиус Земли, g – ускорение силы тяжести, vш – частота Шулера. По графикам погрешности определения составляющих
Rg sin vшt , где R – радиус Земли, g – ускорение силы тяжести, vш – частота Шулера. По графикам погрешности определения составляющих
линейной скорости, приведенным на рис. 14а, видно, что амплитуда шулеровских колебаний снижается с 1,8 до 0,4 м/с, и остаточная погрешность калибровки акселерометров составляет 2 10 4 м/с². На графиках кругами выделены резкие скачки в погрешности определения составляющих линейной скорости, вызванные временными запаздываниями между поступлением данных акселерометров и ВОГ.
Остаточная погрешность калибровки ВОГ определялась по амплитуде шулеровских колебаний в погрешности определения скорости V во время конического движения (гармоническая качка по двум осям с одинаковой частотой и сдвинутой на 90° фазой) в соответствии с формулой V R(1 cosvшt) . По графику погрешности
определения северной составляющей линейной скорости, приведенному на рис. 14б, видно, что амплитуда шулеровских колебаний снижается с 4,3 до 0,3 м/с, а остаточная погрешность калибровки ВОГ находится на уровне 0,005°/ч.
а б
Рис.14 Погрешность определения северной составляющей линейной скорости а – при наклонах, б – при конусном движении
(1 – традиционная калибровка, 2 – с учетом size-эффекта, 3 – калибровка по навигационному решению)
По графикам видно, что предложенная калибровка по навигационному решению дает значительный выигрыш в выработке навигационных параметров по сравнению с традиционной при динамических воздействиях. Амплитуда шулеровских колебаний в погрешности выработки составляющих линейной скорости снижается в 5 – 15 раз в зависимости от вида динамического воздействия. Незначительное превышение остаточных погрешностей калибровки ЧЭ над предъявленными требованиями объясняется избыточной нестабильностью смещений нулей ЧЭ испытываемого ИМ, которая превышает допустимые значения.
ОСНОВНЫЕ РЕЗУЛЬТАТЫ И ВЫВОДЫ РАБОТЫ
1. Предложен алгоритм формирования связанной с измерительным модулем ортогональной системы координат, построенной на измерительных осях блока акселерометров. Предложена методика оценки положения центров масс чувствительных элементов акселерометров с точностью 0,1 мм (1 ) в связанной с измерительным модулем системе координат и приведения сигналов акселерометров к ее началу, что позволяет снизить погрешности выработки навигационных параметров в динамических условиях движения объекта.

18
2. Предложен способ оценки влияния значения температуры и скорости ее изменения на коэффициенты моделей погрешностей акселерометров и ВОГ, позволивший обнаружить зависимость не только смещений нулей и МК, но и углов неортогональностей измерительных осей акселерометров и ВОГ. Разработана методика алгоритмической компенсации, которая позволяет значительно снизить (до 1 10 4 м/с² и 0,01°/ч соответственно) влияние изменения температуры на коэффициенты модели погрешностей измерительного модуля в диапазоне температур 15 – 35 °С и обеспечить требуемую точность (0,001°/ч) ВОГ в узком диапазоне температур 0,4 °С, обеспечиваемом системой температурной стабилизации.
3.Разработана методика уточнения коэффициентов модели погрешностей ИМ БИНС на ВОГ по навигационному решению с использованием фильтра Калмана, включающая уточнение смещений нулей, МК и их асимметрии для ВОГ, временных запаздываний в поступлении данных ЧЭ, а также согласование измерительных осей гироскопов и акселерометров между собой, с точностью необходимой для построения навигационной системы класса 0,001 °/ч. Отличием предлагаемого варианта калибровки БИНС от существующих аналогов является построение единого плана калибровки, исходя из минимизации дисперсии погрешностей оценок полного перечня инструментальных погрешностей ИМ.
4.Проведенные исследования показали, что предложенная методика калибровки ИМ БИНС по навигационному решению дает значительный выигрыш в выработке навигационных параметров по сравнению с калибровкой по прямым измерениям при динамических воздействиях. Амплитуда шулеровских колебаний в погрешностях выработки составляющих линейной скорости снижается в 5 – 15 раз, а в координатах – 2 – 3 раза в зависимости от вида динамического воздействия.
ОСНОВНОЕ СОДЕРЖАНИЕ ДИССЕРТАЦИИ ОПУБЛИКОВАНО В РАБОТАХ В изданиях, рекомендованных ВАК:
1.Волынский Д.В., Драницына Е.В., Одинцов А.А., Унтилов А.А. Калибровка волоконно-оптических гироскопов в составе бескарданных инерциальных измерительных модулей // Гироскопия и навигация. – 2012, №2(77), c.56–68.
2.Емельянцев Г.И., Драницына Е.В., Блажнов Б.А. О калибровке погрешностей ИМ на ВОГ в условиях стенда // Гироскопия и навигация, № 3(78), 2012. c. 55–63.
3.Е.В. Драницына, Д.А. Егоров, А.А. Унтилов, Г.Б. Дейнека, И.А. Шарков,
И.Г.Дейнека Снижение влияния изменения температуры на выходной сигнал волоконно-оптического гироскопа // Гироскопия и навигация, № 4(79), 2012. c. 10–20.
4.Емельянцев Г.И., Блажнов Б.А., Драницына Е.В., Степанов А.П. О калибровке измерительного модуля прецизионной БИНС и построении связанного с ним
ортогонального трёхгранника // Гироскопия и навигация. – 2016. – № 1(92). – С. 36–48. В других изданиях:
5.Погуляй Е.В.1, Егоров Д.А. Калибровка датчиков угловой скорости на базе волоконнооптических гироскопов // Материалы докладов IX научно-технической конференции молодых ученых "Навигация и управление движением", 2007, с.155–159
6.Драницына Е.В., Егоров Д.А. Исследование зависимости выходного сигнала волоконно-оптического гироскопа от температуры в составе бескарданного инерциального измерительного модуля. // Материалы докладов XIV конференции молодых ученых "Навигация и управление движением", 2012. – С. 447–452.
7.Драницына Е.В., Галиева Н.Г., Павлов А.А. Модель погрешностей волоконнооптического гироскопа / Е.В. Драницына, // Материалы XVII конференции молодых ученых "Навигация и управление движением", 2015. – С.342–348.
1 Здесь Погуляй Е.В. читать как Драницына Е.В. на основании свидетельства о заключении брака № II-AK №652831