Материал: GqnnD90jyV
|
11 |
|
|
|
|
|
|
|
|
Наблюдается |
|
зависимость |
|
углов |
|||
|
отклонения |
|
измерительных |
осей |
||||
|
акселерометров от ССК как от величины |
|||||||
|
температуры, так и скорости ее изменения. |
|||||||
|
При этом максимальное изменение углов в |
|||||||
|
рассматриваемом температурном диапазоне |
|||||||
|
не превышает 25". |
|
|
|
|
|||
|
Смещение нуля ВОГ в рассматриваемом |
|||||||
|
температурном |
диапазоне |
изменяется в |
|||||
|
пределах |
[-0,1 |
0,1] / ч , а |
характер |
его |
|||
|
изменения в большей степени коррелирует |
|||||||
|
со скоростью изменения температуры. МК |
|||||||
|
ВОГ в рассматриваемом |
температурном |
||||||
|
диапазоне |
изменяется |
в |
пределах |
||||
|
[-0,01 0,01]% , |
и |
имеет |
|
нелинейную |
|||
Рис. 6 Зависимость углов отклонения |
зависимость, как от величины температуры, |
|||||||
так и скорости ее изменения. Углы |
||||||||
измерительных осей ВОГ от температуры |
||||||||
отклонения |
осей |
чувствительности |
ВОГ |
|||||
(1 – исходная зависимость, 2 – после учета |
||||||||
относительно ССК изменяются в пределах |
||||||||
|
||||||||
температурной компенсации) |
35", а характер зависимости коррелирует как |
|
|
с величиной температуры, так и скоростью ее изменения. |
|
Для учета зависимости коэффициентов моделей погрешностей ЧЭ ИМ выбирались |
|
следующие соотношения: |
|
~ |
n |
|
n |
|
~ |
ˆ |
|
dCijk |
ui0 j uˆi0 j bij _ Tn |
Tij |
|
, |
Cijk |
dCijk |
|||
bij _Tn Tij |
Cijk |
|||||||
n |
|
n |
|
|
|
|
|
n |
|
|
|
_Tn Tijn |
1 dCijk |
|
|
|
n |
n
_Tn Tij (8)
~ |
|
ˆ |
|
|
|
|
|
c |
|
|
T |
n |
|
|
|
c |
|
|
n |
|
~ |
|
ˆ |
|
|
|
c |
|
T |
n |
|
c |
|
n |
|
||||||||
M |
aj |
M |
aj |
c |
aj |
aj _Tn |
|
1 |
aj |
|
T |
, |
M |
j |
M |
j |
c |
|
|
1 |
T |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
aj |
|
|
|
_ Tn |
|
aj |
|
|
|
j |
|
j _ Tn |
|
j |
|
j _Tn |
j |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
ˆ |
n |
|
|
|
|
|
n |
|
|
|||||
где |
i a, ; |
|
|
j x, y, z ; |
k x, y, z;k j ; |
|
|
ˆ |
|
ˆ |
|
– |
коэффициенты |
модели |
|||||||||||||||||||||||||||||
|
|
uˆi0 j ,M aj ,M j ,Cijk |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– значение и |
|||
погрешностей ИМ (1), вычисленные в ходе первого этапа калибровки; Taj ,Taj |
|||||||||||||||||||||||||||||||||||||||||||
скорость изменения температуры внутри j-того акселерометра, |
определенная по одному |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– значение и скорость изменения средней по объему контура |
|||||||||||||||||||||||||
датчику температуры; T j ,T j |
|||||||||||||||||||||||||||||||||||||||||||
температуры |
волоконной |
катушки |
j-того |
ВОГ, |
определенная |
как |
|
среднее по |
8 |
ДТ; |
|||||||||||||||||||||||||||||||||
b ,b |
|
,b |
|
,c |
ij |
,c |
ij _Tn |
,c |
|
|
,d |
Cijk |
,d |
Cijk _ Tn |
,d |
|
|
– коэффициенты, подлежащие определению; n |
|||||||||||||||||||||||||
ij ij _ Tn |
|
ij _Tn |
|
|
|
ij _ Tn |
|
|
|
Cij _Tn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
– степень аппроксимирующего полинома.
Последующий анализ включал в себя оценку коэффициентов введенных моделей (8) с помощью метода наименьших квадратов, вычисление статистических характеристик погрешности аппроксимации в зависимости от увеличения степени используемых полиномов. Степень полинома, аппроксимирующего зависимость соответствующего коэффициента модели погрешностей (1), выбиралась исходя из минимизации СКО погрешности аппроксимации.
Результаты компенсации зависимости коэффициентов моделей погрешностей акселерометров и ВОГ от температуры и скорости ее изменения приведены на рис. 4 – 6 и обозначены цифрой "2". Зависимость коэффициентов модели погрешностей акселерометров хорошо учитывается и приводит к снижению погрешности определения смещения нуля до 1 10 5 м/с², МК до 1 10 3 % и углов отклонения осей чувствительности до 2–3". После учета термоиндуцированной составляющей коэффициенты модели погрешностей акселерометров удовлетворяют требуемой точности в рабочем диапазоне температур [15 35]°C. Используемая алгоритмическая компенсация позволяет значительно снизить влияние температуры и скорости ее изменения на коэффициенты модели погрешностей ВОГ:
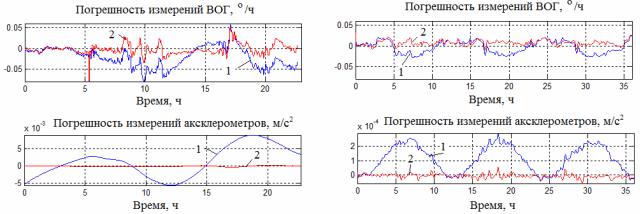
12
погрешности определения смещений нулей, МК и углов отклонения осей чувствительности ВОГ снижаются до 0,01 / ч , (1 2) 10 3 % и 1–2" соответственно. Однако в смещениях нулей и МК ВОГ на участках нагрева и охлаждения по прежнему наблюдается колебательная составляющая, не поддающаяся описанию (рис. 4). Эта составляющая может быть обусловлена колебаниями оптической мощности источника света, которые возникают во время работы системы стабилизации мощности при изменениях температуры.
На рис. 7.а приведены погрешности измерений ВОГ и акселерометров до и после введения температурной компенсации при изменении температуры в диапазоне 15–35°С. Как видно введение термокомпенсации позволяет достичь требуемой точности акселерометров, но не ВОГ. Погрешность определения скорости, вызванная изменением температуры, снижается в 2–3 раза, но остается на уровне 0,01-0,02°/ч.
а б
Рис. 7 Результаты введения температурной компенсации при изменении температуры а – в диапазоне 15–35°С, б – в пределах 0,4°С
(1 – исходный сигнал, 2 – после учета температурной компенсации)
Данные результаты согласуются с известными данными, так обзор литературы показывает, что применения пассивных (конструктивные решения и алгоритмическая компенсация) способов борьбы с температурными воздействиями достаточно для обеспечения точности ВОГ на уровне 0,1–0,01°/ч. Для обеспечения требуемой точности показаний ВОГ 0,001°/ч необходимо уменьшить температурный диапазон и снизить влияние градиентов температуры с помощью системы температурной стабилизации (СТС).
На рис. 7.б приведены погрешности измерений ВОГ и акселерометров до и после введения температурной компенсации при использовании СТС, которая снижает диапазон изменения температуры ВОГ до 0,4°С при изменении температуры окружающей среды в пределах 15–35°С. Как видно из графиков использование только СТС не является достаточным для достижения требуемой точности. Предложенная методика обеспечивает требуемую точность ВОГ 0,001°/ч в узком диапазоне температур 0,4°С, обеспечиваемом системой температурной стабилизации измерительного модуля. Эффективность методики подтверждается повторяемостью результатов для других образцов ИМ БИНС.
В четвертой главе описана методика уточнения параметров калибровки ЧЭ прецизионных ИМ с использованием навигационного решения, после введения температурной компенсации и при использовании термокамеры стенда в качестве СТС.
После проведения первых двух этапов калибровки остаточную погрешность определения угловой скорости и кажущегося ускорения a можно представить в виде
разности восстановленного |
~ |
|
|
с учетом |
первых |
двух этапов |
калибровки, и |
|||||
i ,i a, , |
||||||||||||
действующего i |
|
|
|
|
|
|
~ |
~ |
~ |
~ |
ui |
ui0 ui . |
входного воздействия: i i |
i M i |
Ci ui |
ui0 M i Ci |
|||||||||
Пренебрегая величинами второго порядка малости можно получить |
|
|
||||||||||
|
M |
|
А |
, |
|
|
|
|
(9) |
|||
0 |
|
C |
|
|
|
|
|
|
|
|
||
|
|
|
13 |
a a0 aM |
aC a a . |
(10) |
|
~ |
~ |
ui0 – начальное смещение нуля и его нестабильность в пуске, которую |
|
Здесь i0 Mi |
Ci |
||
вследствие отсутствия достоверных данных о спектре ее изменчивости обычно принято описывать винеровским процессом с соответствующим уровнем начальной дисперсии.
|
M ix |
0 |
0 |
|
~ |
|
|
– составляющая, обусловленная погрешностью M |
|||||
|
iX |
|
|||||||||||
|
|
0 |
|
0 |
~ |
|
|
калибровки и нестабильности в пуске масштабных |
|||||
iM |
|
M iy |
iY |
|
|
коэффициентов, |
пропорциональная |
измеряемой |
|||||
|
|
0 |
0 |
|
~ |
|
|
величине. |
|
|
|
||
|
|
M iz iZ |
|
|
|
|
|
||||||
|
|
0 |
0 |
~ |
|
|
|
– составляющая, обусловленная неортогональностью |
|||||
|
0 aX |
|
|
||||||||||
|
|
|
|
|
~ |
|
|
|
осей ССК. Так как при формировании ССК акселерометр |
||||
aC |
Ayz |
0 |
0 aY |
|
|
|
Ax |
принимается |
за |
опорный, уточняются только |
|||
|
|
Azy |
Azx |
~ |
|
|
|
неортогональности Ayz , Azx , Azy . |
|
||||
|
|
0 aZ |
|
|
|
|
|||||||
|
|
0 |
Gxz |
Gxy |
~ |
|
– |
составляющая, |
обусловленная |
отклонением |
|||
|
X |
||||||||||||
C |
|
|
0 |
|
|
~ |
|
измерительных осей блока гироскопов от ССК. |
|||||
Gyz |
Gyx Y |
|
|
|
|
|
|||||||
|
|
Gzy |
Gzx |
0 |
~ |
|
|
|
|
|
|
||
|
|
Z |
|
|
|
|
|
||||||
~ ~
i Mi Ci ui – шумовая составляющая, характеризующая флуктуационные погрешности датчиков.
А – скорость неучтенного дрейфа, вызванная асимметрией МК ВОГ на гармонической качке объекта.
i – погрешность, обусловленная несинхронностью съёма данных.
Известно, что при поступлении первичных измерений блока гироскопов на вход решения задачи ориентации с неравными временными задержками в условиях угловых
колебаний основания детектируется систематический дрейф. Так запаздывание |
|
zx |
поступления данных гироскопа Z по отношению к X, в условиях синфазных колебаний основания с амплитудами Ax , Az и частотой по этим осям, приводит к детектированию систематического дрейфа y в третьем Y–канале
|
|
2 |
A |
A / 2 . |
(11) |
y |
zx |
|
x |
z |
|
При |
этом |
необходимо также произвести приближенную |
оценку временных |
||
запаздываний гироскопов i (i x, y, z) относительно входных воздействий, приводящих к дополнительным дрейфам вида
|
|
d i |
. |
|
(12) |
|||
|
|
|
||||||
i |
|
|
dt |
|
i |
|
|
|
|
|
|
|
|
|
|
||
Запаздывания ia в сигналах акселерометров ai , |
пересчитанных к началу опорного |
|||||||
трехгранника, приводят к дополнительным погрешностям a i |
(i x, y, z) в их данных, |
|||||||
которые, учитывая их малость, можно представить в виде |
|
|||||||
a |
|
|
dai |
a . |
|
(13) |
||
|
|
|
||||||
i |
|
|
dt |
|
i |
|
|
|
Уточнение |
|
значений калибруемых параметров |
производится с использованием |
|||||
алгоритма фильтра Калмана и включает оценку смещений нулей, МК и их асимметрии для ВОГ, погрешностей взаимной привязки измерительных осей ВОГ и акселерометров, определение временных задержек в блоках ВОГ и акселерометров, опираясь на навигационное решение. При этом выходные сигналы акселерометров инерциального модуля приводятся к началу ССК в соответствии с (7) с помощью значений, найденных в процессе их предварительной калибровки. Оценки искомых параметров поступают в обратную связь для коррекции на каждом шаге обработки разностных измерений.
14
Для решения рассматриваемой задачи формировались разностные скоростные и позиционные измерения. При этом эталонные значения составляющих вектора линейной
|
|
V et |
V et |
V et T |
в |
географических осях |
приводятся к |
началу ССК по |
|||||||||
скорости V et |
|||||||||||||||||
OENH |
E |
N |
|
H |
|
|
|
|
|
|
|
|
|
|
|
|
|
следующим формулам: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
C Ax XYZ V et |
|
|
|
|
f |
Ax XYZ |
|
|
|
|
|
|
|
|
||
V et |
, |
V et |
|
( |
|
COENH |
|
OENH |
) |
ax |
, |
(14) |
|||||
|
|
|
|||||||||||||||
OENH |
|
OENH |
Ax XYZ |
|
Ax XYZ |
|
dT |
Ax XYZ |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
et |
– эталонные значения составляющих вектора линейной скорости для полюса |
||||||||||||||||
здесь VAx XYZ |
|||||||||||||||||
ССК в проекциях на ее оси; |
fAx XYZ |
– вектор приращений на рабочей частоте 1/ dT угла |
|||||||||||||||
поворота ИМ БИНС в связанных осях, измеряемый блоком гироскопов; OENH – вектор угловой скорости вращения Земли в проекциях на географические оси; ax - расстояние от
начала ССК до центра качания платформы стенда.
Погрешности БИНС описаны линеаризованной относительно алгоритмов идеальной работы моделью с вектором состояния:
xT V |
|
V |
N |
V |
h |
|
|
a |
0x |
a |
0y |
a |
0z |
|||
|
E |
|
H |
|
|
0x |
0y |
0z |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(15) |
M x |
M x |
M y |
M y |
M z |
M z |
Max |
May |
Maz |
Gxy |
Gxz |
|
Gyx Gyz Gzx Gzy |
||||
Ayz |
Azx Azy |
xg |
yg |
zg |
xa ya |
za , |
|
|
|
|
|
|
|
|
|
|
где , , характеризуют погрешность по курсу и погрешности построения вертикали
места; VE , VN , VH и , , h погрешности БИНС в выработке составляющих вектора
линейной скорости и географических координат. |
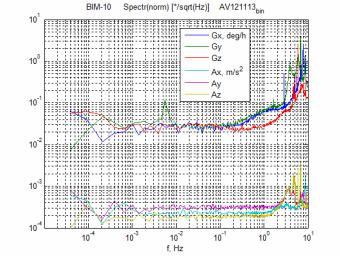
Значения |
параметров |
расчетной |
||||
|
|||||||
|
модели |
погрешностей |
(их |
СКО) |
|||
|
гироскопов и акселерометров ИМ были |
||||||
|
выбраны из анализа их спектров, |
||||||
|
полученных |
по |
данным |
стендовых |
|||
|
испытаний |
на неподвижном основании |
|||||
|
при стабильной температуре (рис.8). |
|
|||||
|
В ходе данной работы, путем |
||||||
|
исследования модельной задачи, была |
||||||
|
сформирована, исходя из минимизации |
||||||
|
дисперсии погрешностей оценок полного |
||||||
|
перечня |
|
коэффициентов |
|
модели |
||
|
погрешностей ИМ, программа тестовых |
||||||
Рис. 8 Уровень спектральной плотности шумов, |
угловых |
движений платформы |
стенда |
||||
обеспечивающая |
наблюдаемость |
и |
|||||
приведенный к частоте 1 Гц |
требуемую точность их определения. |
|
|||||
Сначала использовались достаточно медленные гармонические колебания: амплитуда 360°, период порядка 20 мин последовательно вокруг трех осей с последующим изменением исходного углового положения ИМ на 90° с целью оценки смещений нулей, погрешностей МК и их асимметрии для ВОГ, а также погрешностей взаимной привязки измерительных осей гироскопов и акселерометров.
Затем перезапуск фильтра Калмана и быстрые гармонические колебания основания с амплитудой 180° и периодом 25 сек вокруг вертикальной оси стенда, внутренняя и промежуточная оси стенда были ориентированы так, чтобы обеспечить синфазные колебания одновременно всех трех осей ИМ для оценивания временных запаздываний
гироскопов либо относительно входных воздействий – i |
(i x, y, z) , либо относительно |
||
опорного гироскопа X – yx , |
zx . А для оценки временных запаздываний |
xa , ya , za |
|
акселерометров относительно |
входных воздействий |
использовались |
одноосные |
15
гармонические колебания с амплитудой 180° и периодом около 20 сек последовательно вокруг осей ИМ с изменением его начального углового положения.
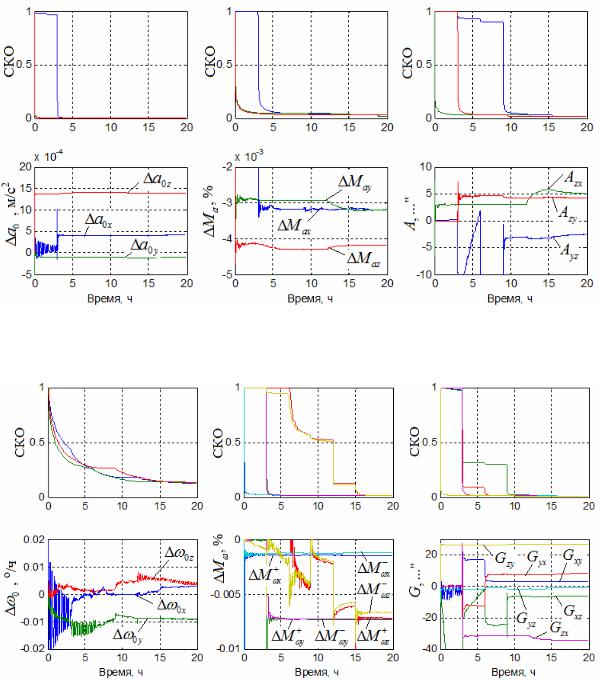
Учитывая ограниченность времени калибровки ИМ БИНС, калибруемые параметры, входящие в вектор состояния системы (15), были описаны в расчетной модели либо винеровскими процессами (смещения нулей, погрешности МК), либо случайными величинами с заданной дисперсией (углы неортогональности измерительных осей, временные запаздывания). Графики, характеризующие погрешности калибровки основных составляющих модели погрешностей ИМ по анализу навигационного решения приведены на рис. 9–10. На графиках приведены значения относительных СКО, характеризующих уровень снижения их начальной неопределенности.
а б в
Рис. 9 Оценки составляющих модели погрешностей акселерометров (10),
а– смещения нулей, начальные СКО = 0,001 м/с², б – МК, начальные СКО = 0,001%,
в– углов отклонения измерительных осей, начальные СКО = 3"
а |
б |
в |
Рис. 10 Оценки составляющих модели погрешностей ВОГ (9), |
|
|
а– смещения нулей, начальные СКО = 0,01°/ч, б – МК, начальные СКО = 0,001%,
в– углов отклонения измерительных осей, начальные СКО = 3"