Материал: GqnnD90jyV
6
высоких требований к стеновому оборудованию. Кроме того, калибровка по навигационному решению позволяет привязать моменты поступления данных инерциальных датчиков к одной временной шкале. Оценка калибруемых параметров осуществляется с привлечением фильтра Калмана, в качестве измерений для которого используются сформированные в условиях стенда погрешности вырабатываемых навигационным алгоритмом параметров. Наличие в выходных данных БИНС соответствующего уровня погрешностей говорит о не скомпенсированных погрешностях калибруемых параметров. Основным преимуществом данного метода является то, что калибровка БИНС производится в целом с учетом канала передачи данных и ошибок вычислительных алгоритмов.
Метод калибровки коэффициентов модели погрешностей ИМ по навигационному решению имеет потенциально высокую точность, достичь которую можно при сочетании с калибровкой по прямым измерениям и формировании программы тестовых угловых движений платформы стенда исходя из минимизации дисперсии погрешностей оценок полного перечня коэффициентов модели погрешностей ИМ. В ходе калибровки по навигационному решению могут быть определены лишь малые (до 1' для угловых величин) уточняющие добавки к калибруемым параметрам, поэтому необходимо с помощью калибровки по прямым измерениям снизить начальный уровень неопределенности уточняемых величин до приемлемого уровня, что обусловлено алгоритмом работы фильтра Калмана. Кроме того, в процессе эксплуатации ЧЭ ИМ испытывают широкодиапазонную динамическую тепловую нагрузку, которая оказывает значительное влияние на их выходные характеристики, а использование прямых измерений позволяет найти коэффициенты нелинейных моделей зависимости калибруемых параметров от значения температуры и скорости ее изменения. Кроме того при использовании данных стенда об угловой скорости наряду с оценкой параметров модели погрешностей ВОГ, может быть поставлена задача нахождения оценок параметров разнесения акселерометров внутри корпуса ИМ, необходимые для пересчета показаний акселерометров к началу ССК.
Таким образом, для достижения остаточных эквивалентных дрейфов гироскопов и погрешностей акселерометров требуемого уровня, в диссертационной работе предложена трехэтапная методика калибровки ИМ.
Во второй главе описан первый этап калибровки по прямым измерениям, в ходе которого производится предварительная оценка коэффициентов математической модели, связывающей выходные сигналы датчика с входными измеряемыми воздействиями, при стабильной температуре с точностью, необходимой для выработки параметров ориентации, которая обычно не превышает единиц угловых минут.
В работе была использована одинаковая модель показаний для акселерометров и ВОГ:
|
ui Di |
Si (i) i ui0 ui |
, i a, |
|
|
|
|
(1) |
||||||||
где |
ui |
uix |
uiy |
uiz T |
– выходной сигнал триады акселерометров ( a ) или ВОГ ( ) в |
|||||||||||
связанной с осями чувствительности косоугольной системе координат (СК) Oxi yi zi ; |
||||||||||||||||
i iX |
iY |
iZ T |
– |
действующая измеряемая величина: линейное ускорение |
a или угловая |
|||||||||||
скорость в связанной с посадочными поверхностями ИМ СК OX0Y0Z0 ; |
|
|
||||||||||||||
ui0 |
ui0x |
ui0 y |
ui0z T – |
смещения нулевого сигнала триады акселерометров ( a ) |
или ВОГ |
|||||||||||
( ); |
|
|
|
|
|
|
|
|
– |
матрица |
масштабных |
коэффициентов |
Sij , |
j x, y, z . |
||
|
Six (i) |
|
0 |
|
|
0 |
|
|||||||||
|
|
0 |
|
Siy (i) |
|
0 |
|
Выходной сигнал может быть нелинейным по отношению к |
||||||||
Si |
|
S |
|
|||||||||||||
|
|
0 |
|
0 |
|
|
(i) |
действующей |
измеряемой |
величине, |
поэтому |
необходимо |
||||
|
|
|
|
|
|
|
iz |
|
|
учитывать зависимость МК от входного воздействия, при ее |
||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
наличии; |
|
|
|
|
|
|
Di |
– |
матрица |
ориентации, |
осуществляющая привязку СК Oxi yi zi |
, образованной осями |
|||||||||||
чувствительных элементов, к приборной системе координат ИМ OX0Y0Z0 ;
7
|
cos ixy |
cos ixz |
sin ixz |
cos ixy |
sin ixy cos ixz |
|
|
1 |
|
ixz |
ixy |
|
|
||||||||||
D |
sin |
iyz |
cos |
iyx |
cos |
iyx |
cos |
iyz |
sin |
iyx |
cos |
iyz |
|
|
iyz |
1 |
|
iyx |
|
; |
|||
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
sin izy cos izx |
sin izx cos izy |
cos izx |
cos izy |
|
|
izy |
izx |
1 |
|
|
||||||||||||
|
|
|
|
|
|||||||||||||||||||
iyx , izx , |
ixy , |
izy , |
ixz , iyz |
– углы отклонения измерительных осей Oxi yi zi от приборных |
|||||||||||||||||||
осей ИМ OX0Y0Z0 , первый индекс обозначает измерительную ось, второй – ось, вокруг |
|||||||||||||||||||||||
которой произведен поворот этой измерительной оси; |
|
|
|
|
|
|
|
|
|
||||||||||||||
ui uix |
uiy |
uiz T |
– шумовая составляющая выходного сигнала триады акселерометров |
||||||||||||||||||||
( a ) или ВОГ ( ).
|
|
|
z |
zx |
|
|
azy |
za |
|
На первом этапе калибровки прибор |
|||||||
|
|
|
|
|
|
устанавливается |
на |
трехосный |
наклонно- |
||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
zy |
|
azx |
|
|
|
поворотный |
стол с |
термокамерой и |
СК |
||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
Z0 |
|
|
|
OX0Y0Z0 , |
связанная |
|
с |
посадочными |
|||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
c |
|
c |
|
|
|
поверхностями ИМ, совмещается с СК O , |
|||||||
|
|
|
|
|
|
|
|
|
|
связанной с планшайбой стенда, с точностью |
|||||||
|
|
|
|
|
|
|
|
|
y |
до погрешности |
установки |
(рис. 1). |
В |
||||
|
|
|
c |
|
|
|
|
|
термокамере |
поддерживается |
|
постоянная |
|||||
xa |
|
|
|
O c |
|
Y0 yx |
|
||||||||||
axz |
axy |
c |
|
c |
yz |
температура |
для |
исключения ее влияния |
на |
||||||||
|
|
xz X0 |
|
|
|
|
ayz |
|
выходной сигнал датчиков. Для нахождения |
||||||||
|
xy |
|
|
|
|
|
|
ayx |
искомых коэффициентов данные от ЧЭ |
||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
x |
|
|
|
|
|
ya |
|
сравниваются с действующими |
эталонными |
||||||
|
|
Рис.1 Системы координат |
|
внешними воздействиями. |
Для |
|
определения |
||||||||||
|
|
|
коэффициентов |
модели |
акселерометров |
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
используется метод последовательных поворотов в гравитационном поле Земли. При калибровке ВОГ в качестве эталонной информации используются величины приращений углов поворота платформы с изменением знака угла поворота. Привлекаются также и данные о начальном положении платформы стенда относительно осей географического сопровождающего трехгранника OENH . Масштабные коэффициенты ВОГ определяются
отдельно для положительных M j и отрицательных скоростей |
M j , |
так как в условиях |
||||||||||||||
знакопеременной |
угловой скорости качки с амплитудой A j |
|
асимметрия |
масштабного |
||||||||||||
коэффициента M |
|
|
вызывает постоянную скорость ухода |
Аj |
2 M |
A |
/ |
, j x, y, z . |
||||||||
|
|
|
|
j |
|
|
j |
|
j |
|
|
|
|
|
||
В ходе первого этапа калибровки определяются коэффициенты u |
|
, M |
aj |
, |
M , |
M , |
||||||||||
|
|
|
|
|
|
|
|
|
i0 j |
|
|
|
j |
j |
||
iyx , izx , ixy , |
izy , |
ixz , iyz модели погрешностей (1) ЧЭ, по которым восстанавливается |
||||||||||||||
входная измеряемая величина |
|
|
|
|
|
|
|
|
|
|
||||||
ˆ |
|
ˆ |
ˆ |
|
|
ui uˆi0 , |
|
|
|
|
|
|
|
|
|
(2) |
i |
Mi (ui ) |
Ci |
|
|
|
|
|
|
|
|
|
|
||||
здесь C |
i |
D 1 , |
M |
i |
S 1 , а знак "^" обозначает, что величины вычислены в ходе первого |
|||||||||||
|
i |
|
|
i |
|
|
|
|
|
|
|
|
|
|
||
этапа калибровки.
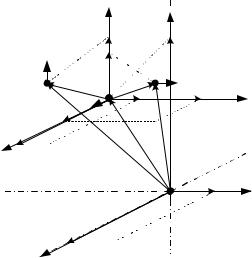
Далее в качестве ССК используется ортогональный трехгранник Ax XYZ , построенный
на ортах измерительных осей акселерометров, с учетом полученных углов неортогональностей. Начало ССК совмещается с положением чувствительной массы (ЧМ) опорного акселерометра Ax (рис. 2).
Координаты двух других акселерометров необходимо привязать к полюсу ИМ, совпадающему с началом ССК, так как геометрическое разнесение ЧМ блока акселерометров приводит к появлению погрешностей измерений, обусловленных различием действующих ускорений, вызванных вращением объекта вокруг полюса.
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
Кажущееся ускорение |
ai (i x, y, z) , |
||||||||
|
|
|
|
|
|
|
|
|
действующее |
на |
i -й |
акселерометр, |
||||||||
|
|
|
|
|
rzZ |
|
|
|
|
|||||||||||
|
|
|
|
|
|
r |
|
|
отличается |
от ускорения |
ao |
в |
центре |
O |
||||||
|
Az |
|
ryZ |
|
|
0 |
|
|
качания платформы стенда в соответствии |
|||||||||||
|
|
azx |
|
Ay |
|
|
||||||||||||||
|
ayx |
Ax |
|
|
|
|||||||||||||||
|
|
|
ryY |
Y |
|
со следующей формулой: |
|
|
|
|
|
|||||||||
|
ryX |
|
rzY |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
r |
|
|
|
|
|
|
|
|
|
|
ai ao |
ai ai |
, |
|
(3) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
zX |
|
|
|
ax |
|
|
|
|
|
|
|
угловых скоростей и |
||||||||
|
|
|
|
|
|
|
|
где , – векторы |
||||||||||||
X |
|
|
|
|
az |
|
ay |
|
|
ускорений |
вращения |
ССК; |
ai |
– |
радиус- |
|||||
|
|
|
|
|
|
|
|
|
векторы |
|
разнесения |
|
ЧМ |
|
блока |
|||||
|
|
|
|
|
|
|
|
r0 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
O |
|
|
акселерометров |
от |
|
центра |
|
качания |
|||||
|
|
|
r0 |
|
|
|
|
|
|
платформы стенда. |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
Радиус-векторы, |
|
для |
|
оценки |
|||||
|
|
|
|
|
|
|
|
|
|
параметров |
разнесения |
датчиков |
внутри |
|||||||
Рис. 2 Разнесение чувствительных элементов |
корпуса ИМ, представляются в виде суммы |
|||||||||||||||||||
|
акселерометров в ССК |
|
|
расстояний от центра качания стенда O до |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
начала ССК Ax и |
от |
полюса |
ИМ |
до |
||||||
чувствительных масс акселерометров, отложенных по соответствующим осям: |
|
|
|
|||||||||||||||||
|
r0 |
|
i r0 j r0 k , |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ax |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
ryX ) i (r0 |
ryY ) j (r0 |
ryZ ) k , |
|
|
|
|
|
(4) |
|||||
ay |
ax |
ayx (r0 |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
(r0 |
rzX ) i (r0 |
rzY ) j (r0 |
rzZ ) k , |
|
|
|
|
|
|
||||||
az |
ax |
azx |
|
|
|
|
|
|
||||||||||||
где r0 , r0 , r0 |
|
– |
расстояния от |
центра |
качания стенда O до чувствительной массы |
|||||||||||||||
акселерометра |
|
Ax , |
и, соответственно, до начала ССК Ax XYZ , |
отложенные по осям O , |
||||||||||||||||
которые с точностью до погрешности определения углов неортогональности совпадают со |
||||||||||||||||||||
ССК; rij |
– расстояния от чувствительной массы акселерометра Ax до чувствительной массы |
|||||||||||||||||||
акселерометра Ai , |
i y, z , отложенные по оси |
j, |
j X ,Y , Z ; |
i , j,k |
– орты ССК. |
|
|
|||||||||||||
Уравнение (3) с учетом (4) для условий стенда примет вид: |
|
|
|
|
|
|
|
|||||||||||||
aX |
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
( Y |
Z )r0 ( X Y Z )r0 |
( X Z Y )r0 |
||||||
|
|
|
Y |
|
|
2 |
2 |
ryY ) ( Y Z |
|
||
aY |
( X |
Z )(r0 |
ryX ) ( X |
Z )(r0 |
X )(r0 |
||||||
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
( X Z |
|
|
|
rzY ) ( X |
Y )(r0 |
|||||
aZ |
|
Y )(r0 |
rzX ) ( Y Z X )(r0 |
||||||||
0
ryZ ) COOENH 0 , (5)
rzZ ) |
|
|
|
|
g |
||
|
T |
|
|
|
g 0 0 |
g |
– вектор ускорения нормальной силы тяжести Земли в проекциях на |
||
оси сопровождающего географического трехгранника ОENH ; |
COENH |
– матрица ориентации |
||
|
|
|
O |
|
ССК относительно осей географического сопровождающего трехгранника OENH .
Задача определения разнесения ЧМ блока акселерометров внутри ИМ ставится как задача оптимального оценивания. Измерения формировались как сумма измеряемого акселерометрами кажущегося ускорения и известного значения ускорения силы тяжести g в месте расположения стенда. Вектор состояния x в данном случае состоит из 9-ти сумм искомых расстояний, которые являются независимыми центрированными случайными величинами:
x [r0 , r0 , r0 , r0 ryX , r0 ryY , r0 ryZ , r0 rzX , r0 rzY , r0 rzZ ] |
(6) |
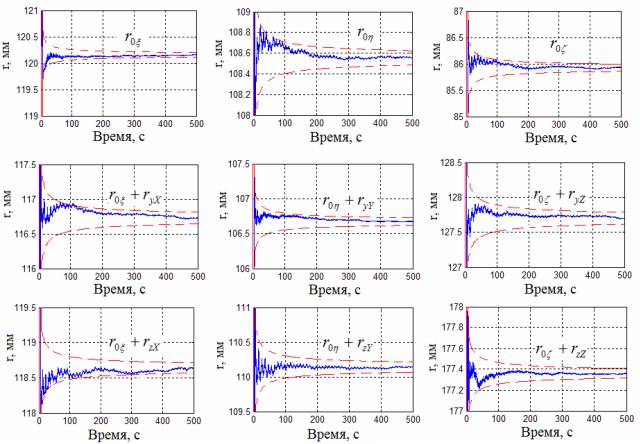
Для обеспечения наблюдаемости и разделения составляющих вектора состояния задавались угловых колебаний ИМ с переменным ускорением поочередно вокруг каждой из осей чувствительности акселерометров, ориентированных вертикально вверх. На рис. 3 представлены оценки элементов вектора состояния (6) и СКО погрешностей их оценивания (на рис.3 выделены пунктиром) по результатам работы ковариационного канала. По
9
графикам видно, что все элементы вектора состояния наблюдаемы, а точность их оценивания находится на уровне 0,1 мм (1 ). По найденным оценкам легко вычисляются искомые расстояния ryX , ryY , ryZ , rzX , rzY , rzZ от полюса ИМ до ЧМ блока акселерометров.
Рис. 3 Оценки расстояний от центра качания платформы стенда до ЧМ блока акселерометров
Выходные сигналы триады акселерометров приводятся к началу опорного трехгранника Ax XYZ согласно (1) и (5) следующим образом:
aX |
uax ua0x |
||
|
|
|
ua0 y |
aY |
M aCa uay |
||
|
|
|
ua0z |
aZ |
uaz |
||
|
|
|
|
|
0 |
|
|
|
|
Y |
|
|
( X |
Z )ryX |
|||
|
|
|
( X |
Z |
|
|
|
|
Y )rzX |
||
0
( X2 Z2 )ryY ( Y Z X )rzY
|
0 |
|
|
( Y Z |
|
|
(7) |
X )ryZ . |
|||
2 |
2 |
|
|
( X Y )rzZ |
|
||
|
|
||
Третья глава включает в себя оценку систематических погрешностей акселерометров и ВОГ относительно их калибровочных значений, вызванных воздействием температуры.
Ввиду малых габаритных размеров акселерометров, температура считалась одинаковой во всем объеме датчика и измерялась одним датчиком температуры (ДТ). ВОГ нельзя рассматривать подобным образом, т.к. они имеют значительные размеры, а их элементы могут быть разнесены внутри прибора, для описания распределения температурного поля использовалось 8 ДТ равномерно распределенных по волоконнооптической катушке. В данной работе рассматривались зависимости коэффициентов модели погрешностей триады ВОГ только от средней по объему контура температуры и скорости ее изменения. Влияние пространственного градиента температуры не рассматривалось, так как исследования анизотропных свойств волоконно-оптической катушки показывают, что температурная чувствительность дрейфа ВОГ не зависит от направления температурного воздействия на волоконный контур. Кроме того, температурная камера используемого стенда не позволяет задавать направление распространения теплового воздействия.
Задача оценки влияния распределения температурного поля на составляющие модели погрешностей (1) ЧЭ ИМ решалась в несколько этапов. В термокамере задавался режим,
10
обеспечивающий максимальное перекрытие значений температур и скоростей изменения температур из рабочего диапазона 15 – 35°C. Стендом задавалось сложное движение, включающее стоянки и вращения в различных положениях и позволяющее за один цикл оценить все коэффициенты модели погрешностей (1) и тем самым значительно снизить время проведения эксперимента. Время осреднения в каждом положении составляло 36 секунд, что позволило компенсировать в выходном сигнале шумы не связанные с воздействием температуры, и не пропустить ее динамичные изменения. На рис. 4–6 приведены графики зависимости коэффициентов моделей погрешностей ВОГ и акселерометров от температуры (обозначены цифрой «1»).
Смещение нуля ВОГ, °/ч |
|||
0.04 |
|
|
|
0.02 |
2 |
|
1 |
|
|
||
|
|
|
|
0 |
|
|
|
-0.02 |
|
|
|
20 |
25 |
30 |
35 |
x 10-3 |
МК ВОГ, % |
|
|
|
|
|
|
5 |
|
|
2 |
|
|
|
|
0 |
|
|
|
-5 |
|
|
|
-10 |
|
1 |
|
|
|
|
|
20 |
25 |
30 |
35 |
Температура, °С Температура, °С Рис. 4 Зависимость смещения нуля и МК ВОГ от температуры
(1 – исходная зависимость, 2 – после учета температурной компенсации)
Смещения нулей акселерометров, м/с²
x 10-3 |
|
|
|
4 |
|
|
|
|
|
1 |
|
2 |
|
|
2 |
|
|
|
|
0 |
|
|
|
-2 |
|
|
|
20 |
25 |
30 |
35 |
МК акселерометров, % |
|||
0.05 |
|
|
2 |
|
|
|
|
0 |
|
|
|
-0.05 |
|
1 |
|
|
|
|
|
-0.1 |
|
|
|
20 |
25 |
30 |
35 |
Температура, °С Температура, °С Рис. 5 Изменение смещения нуля и МК акселерометра
(1 – исходная зависимость, 2 – после учета температурной компенсации)
Считается, что основной вклад в термоиндуцированную погрешность ВОГ вносит изменчивость смещения нуля, поэтому чаще всего прибор устанавливают неподвижно внутри термокамеры, задают изменение температуры и оценивают зависимость выходного сигнала от температуры, считая, что она вызвана только изменением смещения нуля. Предложенный в данной работе способ позволил обнаружить зависимость не только смещения нуля и МК от температуры, но и углов ориентации измерительных осей акселерометров и ВОГ относительно ССК (рис.6). Деформирование каркаса катушки и уложенного на нем волоконного контура при изменении термоупругих напряжений, может приводить к изменению положения плоскости катушки в пространстве и, соответственно, измерительной оси.
На характеристики акселерометров существенное влияние оказывает величина абсолютной температуры. Смещения нулей и МК в рассматриваемом температурном диапазоне изменяются в пределах [-5 5] 10-4 м / с2 и [-0,15 0,15]% соответственно и имеют практически линейную зависимость от температуры и хорошую повторяемость.