Материал: GOSY
59.Порядок включения и настройки РЛС. Подстройка изображения и контроль исправной работы.
Включение. Если РЛС «Наяда5» и тдто сначала внешний осмотр, затем дать питание, подождать 4 минуты(пока прогреется), выставить все регуляторы почти на минимум и ТОЛЬКО после этого можно запускать передатчик(иначе погорит РЛС к х*ям). Потом настройка.
Если РЛС новая, до дать питание, и нажать «Transmitt» потом настройка.
Настройка РЛС. При выведенном усилении яркость экрана делают такой, чтобы линия развёртки стала слегка заметной. Вводят изображение неподвижных колец дальности и фокусировкой делают их возможно более тонкими, затем вводят усиление. Лучшее положение ручки «Усиление», когда по всей площади экрана появляется слабый мерцающий фон шумов приёмника, − это максимальная чувствительность приёмника для обнаружения на максимальной дальности. Следить за яркостью экрана.
Уменьшение влияния помех. При наличии засветки от морских волн применяется временная автоматическая регулировка усиления (ВАРУ − Sea). При наличии помех от осадков рекомендуется использование помехозащитного устройства МПВ (Rain) при одновременном увеличении усиления. Для большего ослабления помех от осадков целесообразно использование диапазона 10 см и импульсов меньшей длительности. Ложные сигналы от боковых лепестков диаграммы направленности могут подавляться посредством ВАРУ, но при этом подавляются и полезные сигналы, поэтому подавление ложных эхосигналов должно быть кратковременным только для их опознавания. При многократном отражении действительным является лишь первый эхосигнал, остальные можно убрать усилением, чтобы убедиться в положении истинных сигналов; ложные сигналы исчезают сами при увеличении дистанции или изменении взаимных ракурсов объектов.
Выбор режима индикации. Режим индикации выбирают исходя из конкретных условий плавания. В режиме относительного движения (ОД) наиболее наглядно и просто оценивается опасность столкновения и раньше обнаруживается изменение скорости целей, следующих пересекающимися курсами. В режиме истинного движения (ИД) раньше обнаруживаются малые неподвижные цели, нагляднее и проще выделяютсяя цели движущиеся и неподвижные, раньше обнаруживается изменение курса встречными судами. В то же время в режиме ИД сложнее оценка опасности столкновения и предполагаемой дистанции расхождения. Наиболее употребимым является режим ОД. При наличии на судне двух РЛС удобно один индикатор использовать в ОД, а второй − в ИД.
Выбор шкал дальности. Радиолокационное наблюдение в открытом море следует вести преимущественно на шкалах среднего масштаба (12 миль) с периодическим просмотром обстановки на шкалах как более мелкого, так и более крупного масштаба. В стеснённых водах наблюдение рекомендуется вести исходя из обстоятельств плавания на шкалах крупного масштаба с периодическим обзором на мелкомасштабных шкалах.
Как правило, применительно к обстановке выбирается шкала, дающая разумный компромисс между наблюдением за ближними целями и достаточной дистанцией обнаружения новых целей. Совмещение этих противоположных
требований может быть достигнуто применением крупномасштабной шкалы в относительном движении со смещённым центром развёртки.

60. Источники помех в работе РЛС .Способы подавления помех. Теневые секторы и мертвые зоны их учет при наблюдении.
Помехи от волнения имеют характерный вид. радиус засветки зависит от состояния моря и может достигать 6−7 миль. Засветка от морских волн опасна тем, что на её фоне могут быть замаскированы даже сильные сигналы от объектов. В этих случаях для уменьшения интенсивности засветки применяется временная автоматическая регулировка усиления (ВАРУ или Sea). При наличии засветки от морских волн, делающей невозможным обнаружение в ближней зоне ручку ВАРУ («Sea») следует устанавливать в такое положение, при котором область сплошной засветки превратится в отдельные флуктуирующие точки, на фоне которых можно выделить эхо-сигналы от объектов. Необходимо помнить, что чрезмерное уменьшене усиления в ближней зоне может привести к потере эхо-сигналов от малых судов и других надводных объектов. Поэтому надо следить, чтобы всегда имелись отдельные выбросы помех от моря. Интенсивность помех от моря тем меньше, чем короче длительность излучаемых импульсов. На РЛС с аппаратной привязкой длительности импульсов к шкалам дальности следует периодически переключать РЛС на крупномасштабные шкалы (0.5 − 4 мили).
Помехи от осадков и низкой облачности. Ширина диаграммы направленности антенны в вертикальной плоскости составляет 15−20°. Поэтому выпадающие осадки, а также низкие насыщенные влагой облака будут обнаруживаться так же, как и обычные объекты, и воспроизводиться на экране в виде засвеченных областей, маскирующих эхо-сигналы от судов. При наличии помех от осадков рекомендуется включать дифференциатор (тумблер «МПВ» или «Rain»), одновременно увеличивая усиление. При этом становится возможным выделить сильные эхо-сигналы от объектов на фоне засветки от выпадающих осадков, а также получить более детализированное изображение при проходе узкостей и при наличии сплошной яркой засветки берегов. В двухдиапазонных станциях эффективен переход на волну 10 см или работа в двух диапазонах одновременно с совместной обработкой сигналов. Интенсивность помех от осадков существенно снижается при работе короткими импульсами.
Помехи, вызванные боковыми лепестками диаграммы направленности антенны. Некоторая часть энергии излучается антенной в виде боковых лепестков диаграммы направленности, расположенных по обе стороны от главного луча на различных углах. В результате близко расположенные сильно отражающие объекты начинают обнаруживаться, кроме главного лепестка ещё и боковыми, что приводит к появлению на экране серии ложных отметок, сильно растянутых по углу и расположенных симметрично по обе стороны от истинной отметки. Обычно такие ложные сигналы наблюдаются на дальности не более 3−4 миль и могут быть ослаблены с помощью ВАРУ. Однако при регулировке ВАРУ следует помнить, что вместе с помехами ослабляются и полезные сигналы, особенно от малых судов.
Ложные и многократные отражения. Сигналы от близко расположенного объекта могут быть получены путём прямого облучения и путём облучения за счёт отражения от судовых надстроек (мачты, трубы и т.д.). В этом случае на экране появляется два сигнала − один истинный, а второй, ложный, на таком же расстоянии но в теневой зоне. Если теневые зоны известны, то легко отличить истинный сигнал от ложного. При наблюдении объектов на небольших расстояниях также возможно появление ложных сигналов за счёт многократного отражения, располагающихся в виде серии отметок на равных интервалах по одному направлению. В этом случае
истинным является ближний сигнал, остальные исчезают при изменении взаимного положения ракурса или увеличении дистанции.
Помехи от работающих РЛС имеют вид серий точек, линий или спиралей, располагающихся радиально по всему экрану. Они легко отличаются от других эхосигналов и меняют своё положение на экране при каждом обороте антенны.
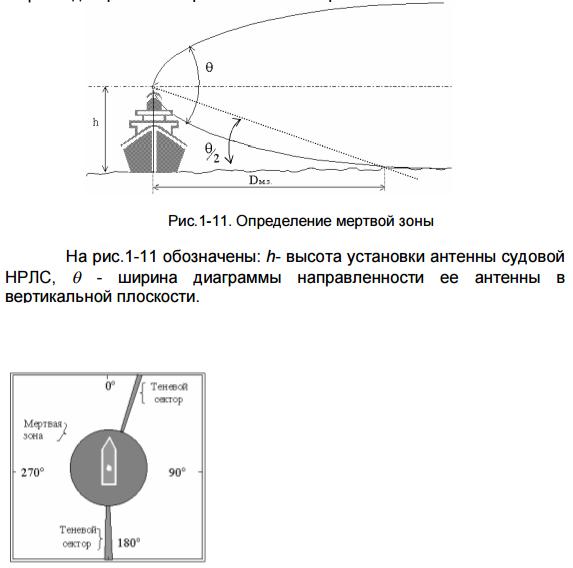
Теневые зоны (сектора) − сектора обзора РЛС, в которых вследствие влияния судовых препятствий (мачт, труб и т.д.) дальность действия станции уменьшается, либо объект вовсе не обнаруживается. Величина теневой зоны зависит от размеров препятствия и расстояния от него до антенны. Теневые зоны можно наблюдать в виде тёмных секторов на фоне помех от волнения. Следует помнить, что в зонах обзора, находящихся на границах теневых зон, диаграмма направленности искажается, боковые лепестки усиливаются, что вызывает ухудшение разрешающей способности РЛС и точности измерения углов.
Мертвая зона-это растояние в пределах которого цели не обнаружаются
Для учета влияния мертвой зоны и теневых секторов, обычно рядом с РЛС помещают такое изображение
61.Система автоматической радиолокационной прокладки. Эксплуатационные требования и основные ограничения при использования САРП для оценки опасности столкновения.
Automatic Radar Plotting Aids (ARPA). Средства автоматизированной радиолокационной прокладки представляют собой электронные устройства обработки радиолокационных данных, предназначенные для предупреждения столкновения судов и решения навигационных задач. Применение САРП регламентировано Главой V СОЛАС – 74.
Основные функции САРП:
►обнаружение целей;
►ручной и/или автоматический захват целей на автосопровождение;
►автоматическое сопровождение целей;
►выработка данных по оценке опасности ситуаций;
►отображение данных;
►проигрывание манёвра собственного судна для расхождения с опасными целями с выдачей рекомендаций;
►визуальная и/или звуковая сигнализация при появлении опасной тситуации.
Основные требования IМО к технико-эксплуатационным характеристикам САРП.
1. Наблюдаемые на экране и сопровождаемые (обрабатываемые процессором) цели должны четко обозначаться специальными маркерами. В случае потери цели, т.е. когда она процессором не обрабатывается, обозначение маркера должно изменяться. Это позволяет судоводителю более четко контролировать не обрабатываемые в данной зоне цели.
2. Параметры курса и скорости сопровождаемых целей должны отражаться в векторной или другой графической форме на экране в режиме истинного и относительного движения цели с возможностью переключения временного масштаба. Это позволяет судоводителю наглядно представлять взаимное положение на наперед заданный отрезок времени. При этом необходимо иметь ввиду, что процессор рассчитывает и отображает информацию на экране о положении целей при предположении неизменности их курса и скорости на время прогноза.
Длина отображаемых векторов должна или регулироваться судоводителем, или иметь фиксированное время экстраполяции.
3.Количество одновременно автоматически сопровождаемых целей с отображением информации на экране – важный качественный показатель САРП. Согласно требованиям IМО в САРП с ручным захватом должны одновременно обрабатываться не менее 10 целей, с автоматическим захватом – не менее 20 (независимо от того, производится захват автоматически или вручную).
4.Согласно требованиям IМО, кроме индикации векторов движения, для любой сопровождаемой цели на экране ИКО или отдельном табло в буквенно-цифровой форме представляется формуляр цели. Он включает следующие параметры:
Dц – расстояние до цели;
Пц – текущий пеленг на цель;
Кц – истинный курс цели; Vц – истинная скорость цели;