Материал: GOSY
наземный сегмент - радионавигационные маяки (Базовые станции); Космический сегмент - спутники на геостационарной орбите (система дифференциальной коррекции).
Источники погрешностей GPS
Задержки ионосферы и тропосферы – Сигнал спутника проходит сквозь атмосферу. Система использует встроенную "модель", которая высчитывает среднее, но не точное, значение задержки.
Отражение сигнала – встречается, когда сигнал перед тем, как достичь приемника, отражается от таких объектов как высотные здания или горы. Это увеличивает время прохождения сигнала, вызывая тем самым ошибку.
Ошибки часов приемника – поскольку не практично устанавливать атомные часы в приемниках GPS навигаторов, имеющиеся встроенные часы могут выдавать очень незначительные временные ошибки.
Орбитальные ошибки – также известны как "ошибки эфимериса", это неточности данных о расположении спутника.
Количество видимых спутников – чем больше спутников может "видеть" GPS навигатор, тем выше точность
Геометрия/затенение спутника – имеет отношение к относительному расположению спутников в любое заданное время. Идеальная геометрия спутников бывает, когда спутники располагаются под тупым углом по отношению друг к другу. Плохая геометрия является результатом расположения спутников на одной линии или в тесной группе.
Намеренное ухудшение сигнала спутника – намеренное ухудшение сигнала министерством обороны США известно как "Избирательная доступность" и предназначено для предотвращения использования с враждебными намерениями GPS сигналов высокой точности.
58.Принцип работы, технико-эксплуатационные характеристики судовой РЛС.
Принцип работы РЛС следующий. Передатчик станции вырабатывает мощные высокочастотные импульсы электромагнитной энергии, которые с помощью антенны посылаются в пространство узким лучом. Отраженные от какого-либо объекта (судна, высокого берега и т. п.) радиоимпульсы возвращаются в виде эхо-сигналов к антенне и поступают в приемник. По направлению узкого радиолокационного луча, который в данный момент отразился от объекта, можно определить пеленг или курсовой угол объекта. Измерив промежуток времени между посылкой импульса и приемом отраженного сигнала, можно получить расстояние до объекта. Так как при работе РЛС антенна вращается, излучаемые импульсные колебания охватывают весь горизонт. Поэтому на экране индикатора судовой РЛС создается изображение окружающей судно обстановки. Принятые эхо-сигналы после преобразования и усиления в приемнике поступают в индикатор, снабженный электронно-лучевой трубкой. Экран электроннолучевой трубки покрыт особым составом, обладающим свойством послесвечения, поэтому эхо-сигналы, возникающие на экране индикатора, угасают постепенно. Центральная светящаяся точка на экране индикатора РЛС отмечает место судна, а идущая от этой точки светящаяся линия показывает курс. Изображение различных объектов на экране индикатора "может быть ориентировано относительно диаметральной плоскости судна (стабилизация по курсу) или относительно истинного меридиана (стабилизация по норду). Направления на объекты определяются по азимутальному кругу соответственно ориентированного или по курсу, или по норду. В последнем случае азимутальный круг должен быть связан с репитером гирокомпаса. По светящимся на экране индикатора градуированным неподвижным кольцам дальности определяется расстояние до нужного объекта, который изображается светящимся пятном, если это одиночный предмет (судно, маяк), или волнистой линией (береговая черта и т. д.). Для точного измерения расстояния имеется дальномерное устройство с подвижным кругом дальности.
«Дальность видимости» РЛС достигает нескольких десятков миль. Однако дальность обнаружения зависит от отражательной способности объектов. На дальность обнаружения РЛС, кроме технических данных станции, влияют гидрометеорологические факторы.
Судовые РЛС позволяют осуществлять плавание в узкостях, расхождение судов и определение места судна по береговым ориентирам или радиолокационным маякам в условиях плохой видимости; за короткий промежуток времени определять курс и скорость встречного судна и предупреждать таким образом столкновения.
Однако РЛС имеет ряд недостатков: ограниченная дальность действия; значительная «мертвая зона», т. е. минимальная дальность обнаружения, которая составляет от 30 до' 120 м по расстоянию и 1,8-1,1° по азимуту; сложность устройства РЛС, затрудняющая ремонт в судовых условиях.
К эксплуатационным характеристикам относят:
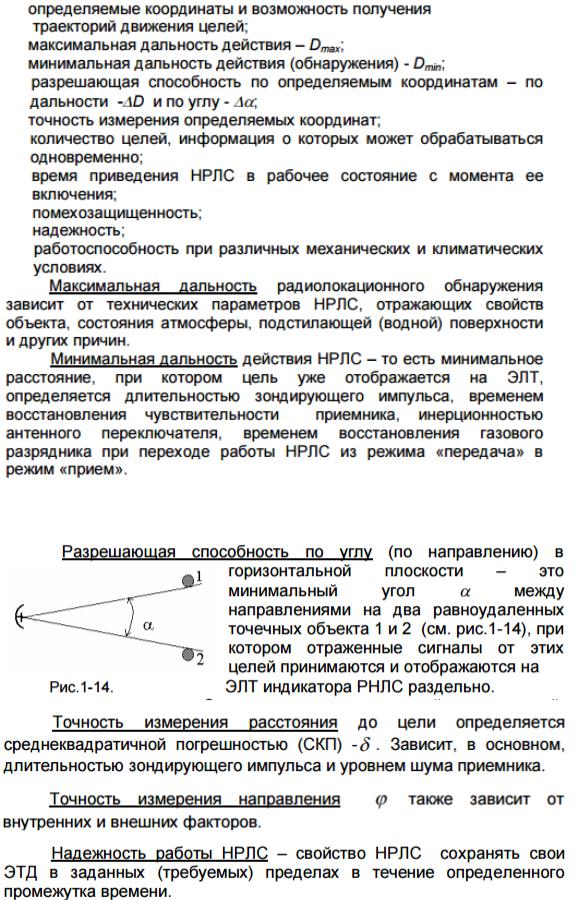
Разрешающая способность по дальности- σD-минимальное растояние между двумя раздельно отоброжаемыми целями находящимеся на одном направлениии.