Материал: 864
данными: при t 0 (в начальный момент) |
v v0 . Подставляя началь- |
ные данные в общее решение (5.1), имеем |
|
v0 0 C1, или C1 |
v0 . |
Таким образом, уравнение (5.1) принимает вид |
|
v at v0 . |
(5.2) |
Уравнение (5.2) представляет закон движения в виде v f (t). |
|
Так как v dS , то решение задачи Коши (5.2) можно преобразовать к dt
виду
|
dS |
|
at v , |
|
|
|
|
|
|
|
|
|
|||
|
dt |
|
|
0 |
|
|
|
или |
|
|
|
|
|
|
|
dS atdt v0dt. |
|
|
(5.3) |
||||
Интегрируя равенство (5.3), получаем общее решение задачи: |
|||||||
S |
|
1 |
at2 v t C |
2 |
. |
(5.4) |
|
|
|
||||||
|
|
2 |
0 |
|
|
||
|
|
|
|
|
|
||
Для определения постоянной интегрирования C2 используем начальные условия: при t=0 S S0 . Подставляя эти значения в равенство (5.4), получаем
S0 0 0 C2,
или C2=S0. Таким образом, уравнение движения (5.4) принимает вид
S |
1 |
at2 |
v t S |
0 |
. |
|
(5.5) |
|
|
||||||
2 |
|
0 |
|
|
|
||
|
|
|
|
|
|
||
Это уравнение представляет искомый закон движения в виде |
|||||||
S f (t). |
положить a g; |
|
|
||||
Если в уравнениях (5.2) и (5.5) |
v0 0; |
S0 0; |
|||||
Sh,то получаем закон свободного падения тела в пустоте:
vgt; h 1 gt2 .
2
В разделе 4 пособия была рассмотрена нормальная система дифференциальных уравнений (4.1). С механической точки зрения эта система задает поле скоростей движений, где t – время; x1,x2,...,xn прямоугольные координаты точки фазового пространства.
Решение системы есть функции
51

x1 1(t,t0,x10,x20,...,xn0);
........................................ (5.6)
xn n(t,t0,x10,x20,...,xn0),
определяющие в любой момент времени t положение движущейся точки, которая в начальный момент времени t0 занимала положение
(x10,x20,...,xn0). При такой интерпретации система (4.1) называется динамической, а каждое ее решение (5.6) – движением. Кривая, описываемая точкой при движении, называется траекторией движения.
Уравнения (5.6) задают траекторию движения в параметрическом виде, t – параметр. Отметим, что при n = 2 имеем движение в плоскости (x1,x2), при n = 3 имеем движение в пространстве
(x1,x2,x3).
В общем случае в дифференциальные системы уравнений могут входить производные высших порядков. В этом случае получается система дифференциальных уравнений высших порядков.
Пример 37. Задача о движении материальной точки под действием силы F, рассматриваемая в теоретической механике, сводится к системе трех дифференциальных уравнений второго порядка. Обозначим через Fx,Fy,Fz проекции силы F на оси координат. Положе-
ние точки в любой момент времени t определяется ее координатами x, y, z, которые являются функциями от времени t; проекции вектора
скорости на оси координат есть dx,dy ,dz (в теоретической механике dt dt dt
их обычно обозначают через x, y,z).
Пусть сила F (а следовательно, и ее проекции) зависит от времени t, положения x, y,z точки и скорости движения точки. Тогда математической моделью поступательного движения материальной точки массы m, согласно закону Ньютона, является система трех дифференциальных уравнений второго порядка:
|
m |
d2x |
|
|
F |
(t,x, y,z, |
|
|
dx |
|
|
dy |
|
|
dz |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
, |
|
|
|
); |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
dt2 |
|
|
x |
|
|
|
dt |
|
|
dt |
|
|
|
dt |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
d2 y |
|
|
|
|
|
|
dx |
|
|
dy |
|
|
|
dz |
|
|||||||||
m |
|
|
|
|
|
|
Fy |
(t,x, y,z, |
|
|
, |
|
|
|
|
, |
|
|
|
|
); |
(5.7) |
|||||
|
|
dt2 |
|
dt |
|
dt |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|||||||||||
m |
d2z |
|
|
F (t,x, y,z, |
dx |
|
, |
dy |
|
, |
dz |
). |
|
||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
dt |
2 |
|
|
z |
|
|
|
dt |
|
|
dt |
|
|
|
dt |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
52
Решением этой системы являются функции x(t,C10,C20); y(t,C10,C20); z(t,C10,C20), которые дают траекторию движения точки в пространстве R3, константы C10,C20 определяются из начальных условий.
Очевидно, что в случае плоского движения, когда траекторией является кривая в плоскости XOY, имеем систему
|
|
|
mx |
Fx(t,x, y,x, y); |
(5.8) |
|
|
|
my |
Fy(t,x, y,x, y). |
|
Заметим, что решать систему дифференциальных уравнений высших порядков можно путем сведения ее к системе дифференциальных уравнений первого порядка или в некоторых конкретных случаях используя искусственные приемы.
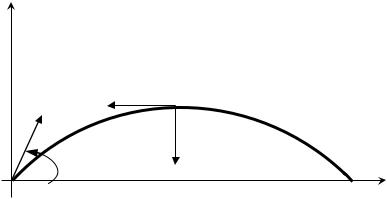
Получим систему вида (5.8) для решения конкретной задачи: тело брошено под углом к горизонту и движется в среде, сопротивление которой пропорционально скорости v тела; найти траекторию движения.
Решение. В любой точке M(x, y) траектории на тело действуют две силы: тяжести P mg и сопротивления среды F kv(рис. 1).
Y
F M(x,y)
α |
P |
X |
.
Рис. 1
Найдем проекции на оси координат равнодействующей этих сил
Fp :
|
|
|
^ |
OX); |
|
Fpx |
Pcos(P, |
OX) F cos(F, |
|
||
|
|
|
|
|
(5.9) |
|
|
|
|
|
|
Fpy |
Pcos(P, |
OY) F cos(F, |
|
OY). |
|
|
|
||||
53
Так как cos(P, OX) 0; cos(F, OX) dx ; ds
cos(F, OY) dy , система (5.9) принимает вид ds
dx
;Fpx kv
|
ds |
||
Fpy |
mg kv |
dy |
. |
|
|||
|
|
ds |
|
cos(P, OY) 1;
(5.10)
Поскольку v ds , то систему (5.10) можно записать в виде dt
dx
;Fpx k
|
|
dy |
dt |
|
Fpy |
k |
mg. |
||
|
||||
|
|
dt |
||
Тогда, согласно второму закону Ньютона [см. формулу (5.8)], имеем дифференциальные уравнения движения
|
mx kx; |
|
|
|
(5.11) |
my ky |
mg. |
|
Каждое из дифференциальных уравнений, входящих в систему (5.11), содержит только одну неизвестную функцию, поэтому интегрирование системы сводится к интегрированию по отдельности каждого из уравнений системы. Первое уравнение системы есть линейное однородное дифференциальное уравнение с постоянными коэффициентами, второе – линейное неоднородное дифференциальное уравнение с постоянными коэффициентами. Уравнения такого типа были рассмотрены в подразделе 3.3, поэтому приводим решение уравнений
системы (5.11) без особых комментариев. |
m |
d2x |
k |
dx |
0, следова- |
||||||||||||
dt2 |
dt |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
тельно, общее решение уравнения ищем в виде |
x C1x1 |
C2x2; со- |
|||||||||||||||
ставляем характеристическое уравнение: |
|
|
|
|
|
|
|
|
|
k |
|
||||||
m 2 k 0 (m k) 0 0; |
k |
|
|
|
|
|
|
t |
|||||||||
|
|
|
|
|
|
||||||||||||
x 1;x |
2 |
e m . |
|||||||||||||||
|
|||||||||||||||||
|
|
1 |
|
|
2 |
|
|
m |
1 |
|
|
|
|
|
|||
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
||
Тогда функция x C C |
|
есть |
общее решение первого |
||||||||||||||
e m |
|||||||||||||||||
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
уравнения системы (5.11).
Решаем второе уравнение системы (5.11):
54
m |
d2 y |
k |
dy |
mg |
d2 y |
|
k dy |
g. |
|||||||||||
|
|
|
|
|
|
|
|
||||||||||||
dt2 |
dt |
dt2 |
m dt |
||||||||||||||||
|
|
|
|
|
|
|
|
k |
|
|
|||||||||
|
|
|
|
|
|
y ; |
|
|
|
|
|
|
|
|
|
t |
|
||
ищем в виде y |
y |
|
|
|
|
|
|
|
|
|
|
||||||||
y |
C |
|
C |
e m |
; |
||||||||||||||
|
|
|
|
|
|
|
|
|
3 |
|
|
|
4 |
|
|
|
|
||
Общее решение уравнения
y At;(y ) A;(y ) 0.
Подставляем в уравнение y ,(y ) ,(y ) и находим значение A:
|
k |
A g A |
gm |
; следовательно, |
y |
gm |
t; общее решение |
|||
|
m |
|
|
|||||||
|
|
k |
|
k |
|
|||||
|
|
|
|
|
|
|
|
k |
t |
|
|
|
|
|
|
|
|
|
|
||
второго уравнения системы (5.11) есть функция y C3 C4e m |
|
|||||||||
gmt. Таким образом, получили общее решение системы (5.11): k
|
|
|
|
|
|
k |
t |
|
|
|
x(t) C C |
|
|
|
; |
|
|||||
|
e m |
|
||||||||
|
1 |
2 |
|
|
|
|
|
|
|
(5.12) |
|
k |
|
|
|
gm |
|||||
|
|
|
|
t |
|
|
|
t. |
||
|
|
|
|
|||||||
|
m |
|
|
|
|
|
||||
y(t) C3 C4e |
|
|
|
|
k |
|||||
|
|
|
|
|
|
|
|
|
|
|
Найдем частное решение системы (5.11), используя начальные условия: x(0) 0; y(0) 0;x (0) v0 cos ; y (0) v0 sin .
Подставим первые два из начальных условий в общее решение (5.12), получим систему
0 C1 C2;
(5.13)
0 C3 C4.
Из системы (5.12) имеем, дифференцируя оба уравнения систе-
мы:
k
dx k C2e m ;
dt m t
|
|
|
|
k |
|
|
|
|
|
dy |
|
k |
|
t |
|
gm |
|||
|
|
||||||||
|
|
|
|
C4e m |
|
|
. |
||
|
m |
|
|||||||
dt |
|
|
|
|
|
k |
|||
Тогда, используя два последних равенства из начальных условий, получаем
|
v0 cos |
|
k |
C2; |
|||||
|
|
|
|
||||||
|
m |
||||||||
|
|
k |
|
|
(5.14) |
||||
v0 sin |
|
C4 |
|
gm |
. |
||||
m |
|
||||||||
|
|
|
|
|
|
k |
|||
Из систем (5.13) и (5.14) находим произвольные постоянные:
55