Материал: 598
Основываясь на этих допущениях все компоненты напряжений можно выразить через прогиб w или угол поворота сечения от обобщенной координаты – радиуса r для осесимметрично нагруженных пластин. Таким образом, решения уравнений углов поворота и прогибов дают все необходимые исходные данные, чтобы вычислить напряжения для любой точки пластины.
Второе допущение эквивалентно пренебрежению влиянием перерезающих сил на прогиб пластины. Допущение это обычно удовлетворяется, кроме случаев наличия отверстий в пластинах, тогда перерезающие силы приобретают большое значение, и в теорию тонкой пластины приходится вводить некоторые коррективы.
Общая теория изгиба круглых пластин
Детали в виде осесимметричных круглых пластин – днища поршней, резервуаров; различного рода крышки; фланцы; диафрагмы и т. п.
Различают кривизну (соответствующую ей деформацию) радиальную – вдоль оси X и тангенциальную – вдоль оси Y
1.1. Определение радиусов кривизны при осесимметричном изгибе
Рассмотрим деформацию пластины при изгибе. На рис. 1 изображена пластина при осесимметричном изгибе до и после деформации. Имеем два радиуса кривизны. Главный радиус 1 с центром C1 определяет радиальную кривизну в плоскости XZ для точки A;
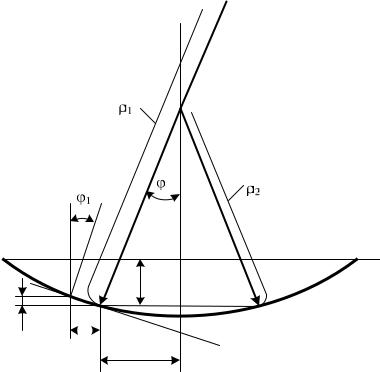
вторая тангенциальная кривизна получена вращением радиуса 2 с центром в C2 и проходящей через точку A. Таким образом, 2 описывает окружность с радиусом r.
 С1
С1
 С2
С2
|
|
O |
x |
|
A |
w |
|
|
B |
|
|
dw |
dr |
|
|
|
r |
z |
|
|
|
Рис. 1 |
|
Начало координат поместим в точку О.
Через точку A проведем касательную с углом наклона , который определяет угол поворота сечения пластины. При некотором приращении r на drпрогибw изменится на dw.
Тогда |
dw |
tg . Кривизна в |
сопротивлении материалов |
||||
|
|||||||
|
dr |
1 |
|
d2w |
|
||
равна второй производной прогиба, |
|
|
(знак минус при- |
||||
|
|
dr2 |
|||||
|
|
|
|
1 |
|
||
нят в связи с противоположно направленными прогибом и центром кривизны), следовательно,
|
1 |
|
|
d2w |
|
d |
. |
|
|
|
|
(1) |
|||||
|
|
|
|
dr2 |
dr |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
1 |
|
|
через угол и смещение r. Из |
|||||||||||||
Выразим радиус кривизны 2 |
|||||||||||||||||
треугольника ABC2 |
имеем: |
r |
sin . Или |
1 |
|
|
|
|
1 |
|
dw |
. |
|||||
|
|
2 |
r |
|
|
||||||||||||
|
|
2 |
|
|
|
|
|
|
r dr |
||||||||
1.2. Определение напряжений r |
и t |
(2) |
|||||||||||||||
|
|
|
|
|
|||||||||||||
На основании закона Гука для плоского напряженного состояния относительные деформации могут быть выражены как
r |
|
r |
|
t |
; |
(3) |
|||||
|
|
|
|
||||||||
|
|
|
E |
|
|
|
E |
|
|||
t |
|
t |
|
|
r |
. |
(4) |
||||
E |
|
||||||||||
|
|
|
|
E |
|
||||||
Примечание: На площадках, параллельных срединной поверхности для многих случаев загружения ( z 0), кроме сосредоточенной центральной силы.
Относительные удлинения в радиальном и тангенциальном на-
правлениях равны: r |
|
z |
и t |
|
z |
(см. чистый изгиб прямых |
||
|
|
|||||||
|
|
|
r |
|
|
|
t |
|
|
|
|
|
|
|
|||
стержней [1]).
Подставим в уравнения (3) и (4) r и t , с условиями (1), (2). Определим напряжения r и t :
r |
|
E z |
d |
|
|
; |
||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
||||||||
|
1 2 |
dr |
|
|
r |
|
||||||
|
|
|
E z |
|
|
|
d |
|
||||
t |
|
|
|
|
|
|
|
|
. |
|||
|
|
|
|
|||||||||
|
1 2 |
r |
|
dr |
|
|||||||
(5)
(6)
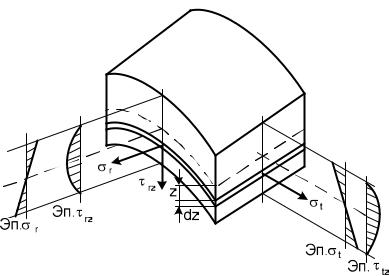
Напряжения r и t линейно зависят от координаты Z (см. рис.
2).
Рис. 2
Кроме нормальных напряжений возникают касательные напряжения rz перпендикулярные срединной поверхности. Напряжения распределены по параболическому закону (см. поперечный изгиб прямых стержней [1]). Роль касательных напряжений невелика ввиду незначительной толщины пластины h по отношению к диаметру и много меньше нормальных. Однако равнодействующей касательных напряжений – поперечной силой Q rz r d h пренебрегать нельзя, ибо она играет важную роль в уравнениях равновесия элемента пластины (см. рис. 3, а).
Mtdr |
|
qrd |
dr |
|
Qrd +d(Qrd |
|||||||
|
|
|||||||||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
Mrrd +d(Mrrd ) |
||||||
|
|
|
|
|
|
|||||||
dr |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
Mtdr |
|||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Mr rd |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z dA r d dr |
||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
||||||||
d |
|
|
|
|
||||||||
|
|
|
Qrd |
|
|
|
|
|
|
|
|
|
а
Рис. 3
1.3. Определение радиального и тангенциального моментов
При интегрировании по площади граней элемента пластины нормальные напряжения можно привести к распределенным изгибающим моментам Mr и Mt , а касательные – к поперечной распределенной силе Q. Размерности распределенных моментов и силы – Нм/м и Н/м, соответственно.
Момент в радиальном направлении представим в виде интегра-
ла:
|
h |
|
Mr |
2 |
|
r z dz. |
(7) |
h
2
Интегрируем (7) с учетом (5)
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h/ 2 |
||||
|
|
|
|
E z2 d |
|
|
|
|
|
|
E d |
|
z3 |
|
||||||||||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|||||||||||||||||||||||||||
Mr |
|
|
|
|
|
|
|
|
|
|
|
|
dz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|||||||||||||||||||||
|
|
|
h 1 2 |
dr |
|
|
|
|
r |
|
1 2 |
|
dr |
|
r |
|
|
h / 2 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
E h3 |
|
d |
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
, |
|
|
|
|
(8) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
||||||||||||||||||
121 2 |
dr |
|
r |
|
|
dr |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
E h3
где D 121 2 – цилиндрическая жесткость.
Аналогично поступим с моментом в окружном направлении:
|
|
h |
|
|
||
Mt |
2 |
|
|
|
||
|
t z dz. |
(9) |
||||
|
|
h |
|
|
||
|
|
|
|
|||
2
|
|
|
|
d |
|
|
|
Или, с учетом (6), Mt |
D |
|
|
|
|
, |
(10) |
|
|
||||||
|
r |
|
dr |
|
|
||
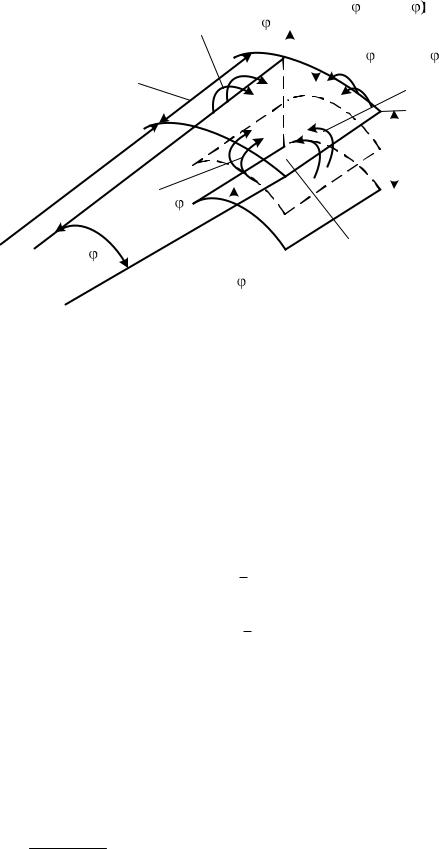
Уравнения (5), (6), (8) и (10) определяют напряжения и моменты по функции , характеризующей угол поворота нормали к срединной плоскости изгиба ZOX . Функция пока не определена. Её можно определить из условия равновесия бесконечно малого элемента пластины (рис. 3 а).
Согласно рис. 3, а в окружных сечениях действуют поперечная сила Q r d и момент Mr r d . В радиальных сечениях тангенциальные силы (в виду симметрии) отсутствуют и момент равен
Mt dr. При переходе на наружную грань с приращением радиуса на dr сила Q и момент Mr получают приращения d Q r d и d Mr r d .
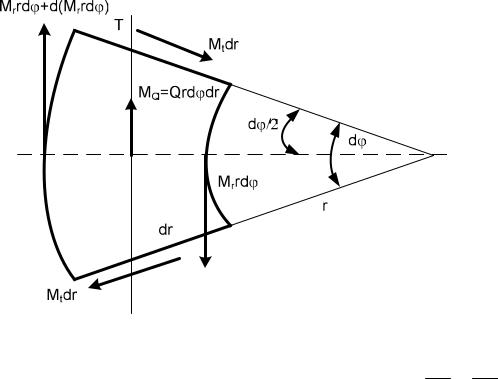
1.4. Определение прогибов и углов поворота
Для составления уравнения равновесия моменты изобразим в виде векторов (рис. 3, б). Проведем ось T через середину элемента пластины перпендикулярно линии симметрии. Величиной приращения поперечной силы d Q r d как функцией второго порядка малости пренебрегаем. Тогда момент от пары сил Q вокруг оси T сведем к MQ Q r d dr,
где dr– плечо.
б
Рис. 3
Спроецируем векторы моментов на ось T , считая sin d d :
2 2