Материал: 4688
31
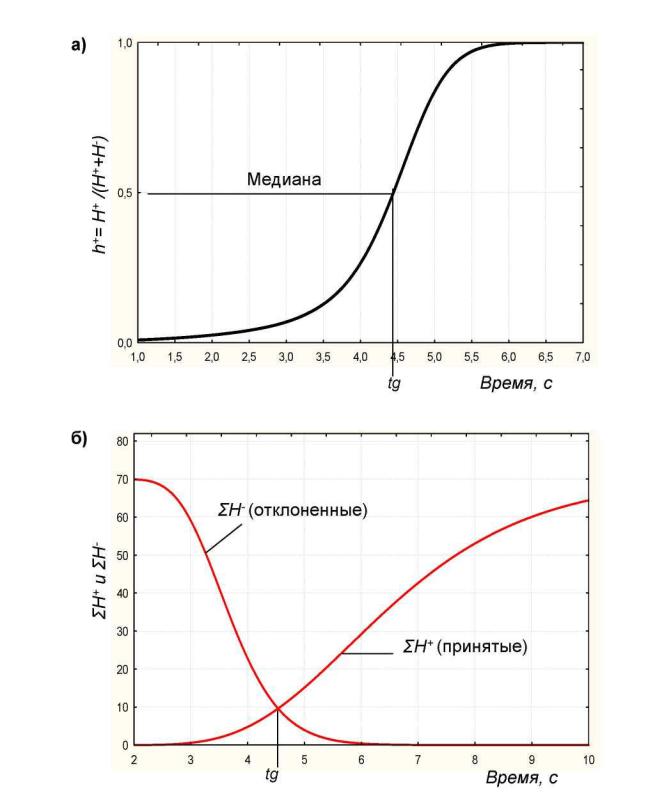
Определить граничный интервал tG как интервал, который половиной водителей был принят и половиной отклонен. Интервал можно определить по медиане распределения, образованного следующим образом:
h |
H |
(1) |
, |
H H
где H – функция распределения принятых интервалов;
H – функция распределения отклоненных интервалов;
h – функция распределения граничных интервалов.
Величина граничного интервала определяется по значению 0,5
распределения h . Распределение показывает вероятность, с которой водителями может быть принят временной интервал меньше и равный соответствующему значению (рис. 2, а).
Определить граничный интервал, как интервал, для которого число временных интервалов меньше граничного интервала, которые были отклонены водителями, равно числу принятых интервалов, больших, чем граничный интервал. При этом граничный интервал определяется точкой пересечения прямой (для принятых интервалов) и обратной (для отклоненных интервалов) кумулятивных кривых (рис. 2, б).
32
Рис. 2. Определение граничных интервалов
33
Следует отметить, что при проведении обследований, направленных на определение ключевых параметров, описывающих движение транспортных потоков на нерегулируемых пересечениях, необходимо помнить следующее:
1.На второстепенном подходе в течение исследуемого периода всегда должна быть очередь, состоящая как минимум из 5 – 6 транспортных средств.
2.При измерении принятых водителями второстепенного направления временных интервалов между транспортными средствами в главном направлении должны учитываться лишь действительно принятые интервалы.
Отклоненные интервалы в данном случае не учитываются.
3. Число обследований (измерений) должно быть достаточным для обеспечения статистической значимости предполагаемых результатов.
Вслучае, когда величина интервала между транспортными средствами
вглавном направлении является значительно больше граничного интервала,
после первого транспортного средства во второстепенном направлении начинают движение и другие транспортные средства с определенным временным интервалом, определенно меньшим, чем граничный интервал.
Таким интервалом называется интервал следования, который главным образом зависит от наличия у водителей возможности свободно ориентироваться (видимость). Практика показала, что величина интервала следования представляет собой приблизительно постоянную величину. В
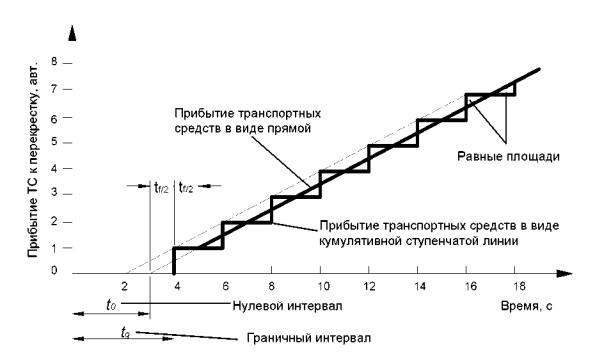
этом случае закон движения второстепенного потока на нерегулируемом пересечении можно описать как (рис. 3):
n |
t tg |
1, |
(2) |
|
|||
|
t f |
|
|
34
Рис. 3. Закон движения второстепенного потока на нерегулируемом
пересечении
где n – число транспортных средств, которые успевают проехать во второстепенном направлении при величине временного интервала между транспортными средствами в главном направлении равной t;
tg – граничный интервал; t f – интервал следования.
Поскольку на перекресток въехать может лишь целое число транспортных средств, число n всегда должно округляться. В результате процесс разъезда транспортных средств на нерегулируемом пересечении можно представить в виде ступенчатой кумулятивной кривой (рис. 3).
Минимальный интервал, который необходимо для въезда на перекресток первому транспортному средству и представляет собой граничный интервал.
Минимальный интервал, необходимый для разъезда n транспортных средств
можно при этом определить с помощью преобразования формулы (2):
t tg n 1 t f |
(3) |
35
Процесс разъезда также можно представить в виде примой линии (см.
рис.3). При этом для полного учета последнего из n транспортного средства
необходимо к интервалу, полученному по формуле (3) добавить t f |
/2: |
|||||
t tg n 1 t f |
t f |
|
|
|||
|
|
|||||
|
2 |
|
|
|||
или |
|
|
|
|
|
|
t nt f |
tg |
t f |
|
(4) |
||
|
||||||
|
2 |
|
|
|
|
|
Угол наклона прямой, представленной на рис. 3, зависит от величины
интервала следования. Пересечение этой прямой с осью времени определяет временной интервал t0 tg t f / 2 , который называется начальным (нулевым)
интервалом. Заменив t0 на tg в формуле (4), получим следующее:
0 |
|
|
|
|
|
|
|
t0 |
|
, |
(5) |
||
n t |
|
|||||
|
|
t |
f |
|
|
|
|
|
|
|
|
||
при t t0 , t f t0
Кольцевые пересечения с точки зрения техники разработки формул для оценки пропускной способности пересечений такого типа являются частным случаем нерегулируемых пересечений. Это легко можно увидеть при рассмотрении одного из подходов к обустройству кольцевого движения
(рис.4). Рассмотрим более подробно основу методики, используемой,
например, американскими учеными. На рис. 5 представлена блок-схема,
отражающая последовательность действий при проектировании нерегулируемого пересечения.