Материал: 4668
6
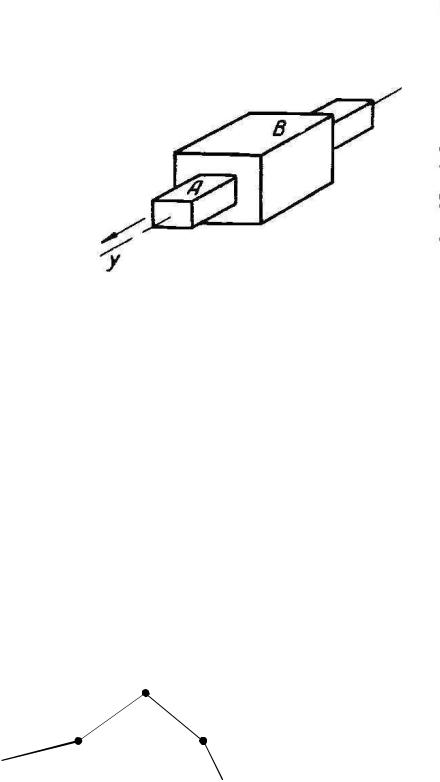
5. Поступательная пара. Число степеней свободы – 1, число условий связи – 5, (пара пятого класса).
Рис. 1.
Класс кинематической пары определяется количеством условий связи по формуле S = 6 − H, где Н – число степеней свободы.
1.3. Кинематическая цепь. Формула подвижности кинематической цепи.
Кинематическая цепь – связанная система звеньев, образующих между собой кинематические пары. Кинематические цепи делятся на простые и сложные.
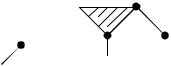
Простая кинематическая цепь – каждое звено входит не более чем в две кинематические пары (рис.2).
В
А
С
Рис.2.
Сложная кинематическая цепь имеет хотя бы одно звено, входящее более чем в две кинематические пары
7
ВС
А  Е D
Е D
Рис. 3
Простые и сложные кинематические цепи делятся на замкнутые и незамкнутые, которые также бывают простые и сложные.
В машиностроении рассматриваются такие кинематические цепи, в которых одно из звеньев принято неподвижным – это стойка. Структурная формула подвижности кинематической цепи (для пространственных механизмов) в общем виде записывается как
W = 6n − 5p5 − 4p4 − 3p3 − 2p2 − p1
где n – число подвижных звеньев, p5 – число пар 5-го класса,
p4 – число пар 4-го класса, p3 – число пар 3-го класса, p2 – число пар 2-го класса, p1 – число пар 1-го класса,
Эту формулу впервые вывел Сомов, а развил Малышев, поэтому формула носит название Сомова-Малышева.
1.4. Механизм. Степень подвижности механизма
Механизм – кинематическая цепь, в которой при заданном движении одного или нескольких звеньев относительно любого из них все остальные звенья совершают однозначно определяемые движения. Звенья механизма, законы движения которых приняты заданными, – ведущие звенья, все остальные – ведомые. Для изучения движения механизма мало знать, из каких кинематических пар он образован, необходимо знать размеры звеньев, их взаимное расположение. Поэтому всегда составляют кинематическую схему механизма в определённом масштабе.
Так как любой механизм является кинематической цепью, то и его структурная формула в общем виде та же, что и для кинематической цепи.
8
1.5. Кинематика механизмов
Кинематический анализ механизмов в общем случае предусматривает:
1)Определение положения звеньев и построения траекторий отдельных точек.
2)Определение скоростей и ускорений точек, угловых скоростей и угловых ускорений звеньев.
Решение может быть графическим, графоаналитическим, аналитическим. Выбор метода зависит от точности расчёта. Более точный – аналитический, более наглядный и простой – графический и графоаналитический.
Планы скоростей и ускорений механизма
Наиболее удобно определять скорости и ускорения графоаналитически с помощью планов скоростей и ускорений.
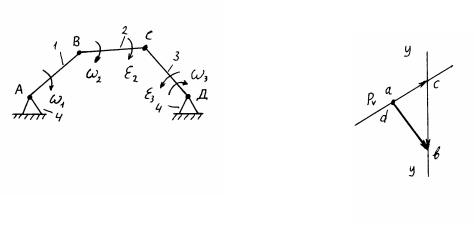
Задано: механизм шарнирного четырёхзвенника, угловая скорость его ведущего звена ω1. (Рис. 4).
Определить: скорости и ускорения точек A,В,С,D, угловые скорости ω2 и ω3, угловые ускорения ε2 и ε3 его звеньев.
Рис.4. Рис.5.
Vв = ω1Lав
Отложим точку Рv (полюс). Из этой точки по ходу скорости точки В отложим вектор в масштабе.
Vс = Vс2 = Vс3
r
VrC2VC3
r |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
= VВ |
+ VВС |
|
+ V |
= V + V ; |
ω |
|
= |
V |
ω |
|
= |
VДС |
|
|
|
|
|
|
|||||||||||
|
|
V |
|
ВС |
; |
|
|
. |
||||||
|
|
2 |
|
3 |
|
|||||||||
= V + V |
В |
ВС |
Д СД |
|
|
LВС |
|
|
LДС |
|
||||
Д |
ДС |
|
|
|
|
|
|
|
|
|
|
|
|
|
9
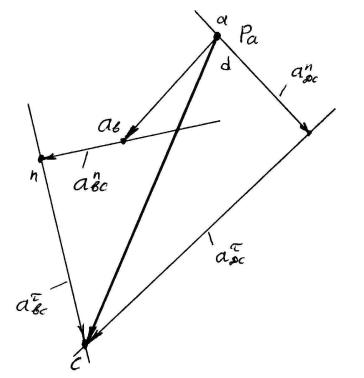
Построение плана ускорений
Рис.6.
а |
|
= ω |
2 |
L |
|
|
|
аn |
= ω2Lвс |
ε |
|
= |
аτ |
; ε |
|
= |
аτДС |
. |
|
|
|
|
|
|
|
ВС |
|
|
|||||||||||
|
|
|
|
|
|
Lвс |
|
Lдс |
|||||||||||
|
в |
|
1 |
|
АВ |
|
|
ВС |
2 |
|
2 |
|
|
3 |
|
|
|||
ас |
= ас2 |
= ас3 |
|
|
аnДС = ω32Lдс |
|
|
|
|
|
|
|
|
|
|||||
v |
|
= |
v |
|
vn |
v |
τ |
|
|
|
|
|
|
|
|
|
|
||
а |
С2 |
а |
В + а |
ВС |
+ а |
ВС |
|
|
|
|
|
|
|
|
|
|
|||
|
|
= |
r |
|
r |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
а |
С3 |
а |
Д |
+ аn |
+ аτ |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
ДС |
|
ДС |
|
|
|
|
|
|
|
|
|
|
|||
1.6.Введение в кинетостатику и динамику механизмов
1.Силы, действующие на механизм (машину)
Силы, возникающие при работе машин или механизма, делятся на следующие группы:
1.Движущие силы (Рд) или их моменты (Мд).
2.Силы полезного сопротивления (Рпс) или их моменты (Мпс).
3.Силы тяжести (G).
4.Силы упругости (Ру) или моменты от сил упругости (Му).
5.Силы вредных сопротивлений (Рвс) или моментов от этих сил (Мвс).

10
6.Силы инерции (Ри) или их моменты (Ми). При значительных скоростях они очень велики. В этом случае их надо определять.
2.Задачи силового анализа
Силовой анализ механизмов основан на решении первой задачи динамики, когда по заданному движению определяют действующие силы. Используется принцип Даламбера, согласно которому звено механизма может рассматриваться как находящееся в равновесии, если ко всем силам, действующим на него, добавить силы инерции. Эти уравнения равновесия называют уравнениями кинетостатики.
3. Введение в динамику механизмов Динамика механизмов изучает их движение с учётом дейст-
вующих на них сил. Обычно решают две основные задачи динамики:
1.Сводится к тому, что по по заданному аналитически или графически закону движения механизма требуется определить силы, действующие на механизм.
2.Определяются законы движения механизма по заданным
силам.
2.СТАДИИ ПРОЕКТИРОВАНИЯ МАШИН И ВИДЫ КОНСТРУКТОРСКОЙ ДОКУМЕНТАЦИИ
Процесс проектирования машин состоит из нескольких последовательных стадий, на каждой из которых в соответствии с ГОСТом разрабатывается определённый вид конструкторской документации: техническое задание; техническое предложение; эскизный проект; технический проект; рабочая документация (опытного образца или опытной партии, установочной серии, установившегося серийного или массового производства).
Техническое задание разрабатывается на основании исходных материалов для проектирования и является основным регламентирующим документом для конструкторов. Техническое задание включает в себя следующие основные данные:
1.Наименование машины, характеристика объектов, на которых машина будет применяться.
2.Наименование документа, на основании которого разрабатывается машина.
3.Сведения о назначении машины и перспективности её использования, требования к выполняемому технологическому процессу.