Материал: 4668
Министерство образования Российской Федерации Воронежская государственная лесотехническая академия
Е.В. Карамышев
ПРИКЛАДНАЯ МЕХАНИКА
ТЕКСТЫ ЛЕКЦИЙ
Воронеж 2002
2
УДК 621.01 Карамышев Е.В. Прикладная механика: Тексты лекций
/Е.В.Карамышев. Воронеж; ВГЛТА, 2002.-32 с.
Предназначено для студентов специальности 240400 – Организация и безопасность движения.
Изложены основы кинематического и силового анализа, принципы инженерных расчётов, понятия о допусках и посадках, механических передачах, валах и осях, соединениях и упругих элементах деталей машин.
Печатается по решению редакционно-издательского совета ВГЛТА Ил.- 18. Библ.- 9.
Рецензент канд. техн. наук, доцент ВГАУ А.В. Полуэктов
УДК 621.01 © Карамышев Е.В., 2002
© Воронежская государственная лесотехническая академия. 2002
3
ВВЕДЕНИЕ
Цель дисциплины состоит в изучении общих вопросов теории механизмов и машин, принципов инженерных расчётов, материалов, допусков и посадок деталей машин и их конструкций.
Задача курса состоит в приобретении знаний и начального опыта по использованию принципиальных инженерных расчётов и понятий по научно обоснованным методам проектирования деталей механизмов и машин.
Изучение курса базируется на физико-математических и общетехнических дисциплинах.
Курс построен на ознакомлении и изучении следующих разде-
лов:
1.Общие вопросы теории машин;
2.Особенности проектирования машин и принципов их инженерных расчётов
3.Технические измерения, допусков и посадок;
4.Механические свойства конструкционных материалов;
5.Изучение деталей и узлов общего назначения, т.е. деталей и узлов общих для всех машин.
1.МАШИНЫ И МЕХАНИЗМЫ. СТРУКТУРНЫЙ, КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ АНАЛИЗ
Машины – устройства, предназначенные для преобразования энергии, материалов и информации с целью обеспечения физического и умственного труда человека. Машины состоят из деталей, объединяемых в узлы.
Часть машины, преобразующая движение одного или нескольких тел в требуемое движение других тел, называется механизмом.
Деталь – составная часть машины, изготавливается без сборки. Детали бывают простыми (болт, шпонка) и сложными (корпус редуктора, станина и прочее).
Узел – законченная сборочная единица, состоящая из ряда соединённых между собой деталей (тормоз, КПП, редуктор). Сложные узлы включают несколько простых узлов.
1.1. Кинематическая пара, степень свободы и условия связи
Кинематическая пара – подвижное соединение двух тел, находящихся в соприкосновении. Каждое из двух тел кинематической
4
пары – звено. Поверхность, линия, точка звена, соприкасающаяся с другим звеном, – элемент кинематической пары.
Звено кинематической пары, как и абсолютно твёрдое тело обладает 6-ю степенями свободы ( 3 – вращения вокруг осей Х,У,Z и 3
– поступательные по оси Х,У,Z).
Ограничения, наложенные на относительные движения звеньев кинематической пары – условия связи в кинематических парах. Вхождение одного звена в кинематическую пару с другим звеном налагает на относительное движение этих звеньев определённые связи. Число этих условий связи не должно быть больше или равно 6-ти, т.к. тогда кинематическая пара переходит в жёсткое соединение двух звеньев. Не должно быть и меньше одного, т.к. тогда кинематическая пара перестаёт существовать. Число степеней свободы Н = 6 – S, где S – число условий связи, наложенных на относительное движение каждого звена. S меняется в пределах от 1 до 5.
1.2. Классификация кинематических пар
Кинематические пары делятся:
1)По виду движения звеньев на плоские (у которых звенья перемещаются в одной плоскости либо в параллельных) и пространственные (звенья перемещаются в непараллельных плоскостях).
2)По виду элементов соприкасающихся звеньев на низшие (звенья соприкасаются по поверхности) и высшие (звенья соприкасаются по линиям и точкам).
3)По числу степеней свободы на одноподвижные, двухподвижные, трёхподвижные, четырёхподвижные и пятиподвижные.
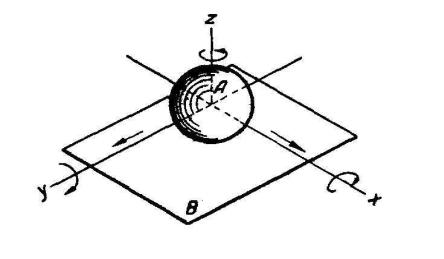
По числу условий связи делятся на пять классов (рис.1):
1.Шар – плоскость. Число степеней свободы 5, число условий связи - 1, (пара первого класса).
5
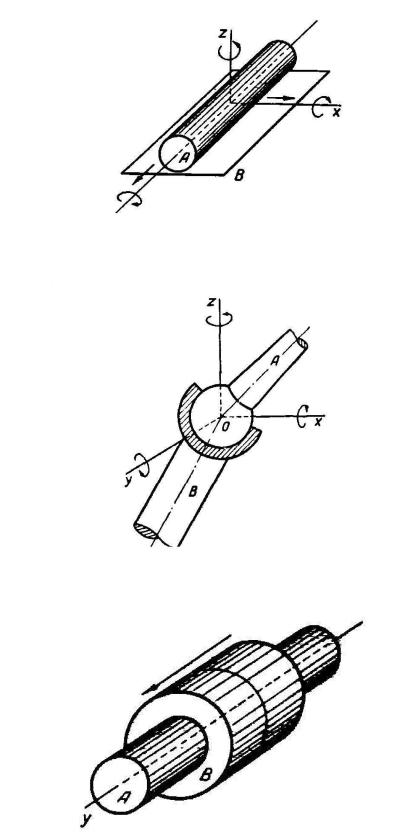
2. Цилиндр – плоскость. Число степеней свободы 4, число условий связи – 2, (пара второго класса).
3. Сферическая пара. Число степеней свободы – 3, число условий связи – 3, (пара третьего класса).
4. Цилиндрическая пара. Число степеней свободы – 2, число условий связи – 4, (пара четвёртого класса).