Материал: 4415
21
Аналогично определяется масштаб "bо", для порожнего автомобиля
bо aо |
Gо вщ |
|
|
|
,мм |
(2.15) |
|
|
Gо |
|
|
где ао – масштаб динамического фактора Dо порожнего автомобиля.
Отрезки в масштабе "bо" и " b" соединяются штриховыми линиями, и каждая из них обозначается соответствующим значением коэффициента сцепления φ.
D0 |
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
0,45 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D1 |
|
|
|
|
|
|
|
|
|
|
|
0,4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D2 |
|
|
|
|
|
|
|
0,4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D3 |
|
|
|
|
|
0,3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0,2 |
|
|
|
|
|
|
|
|
|
D4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,1 |
|
|
|
|
|
|
|
|
|
|
|
0,1 |
|
0,05 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
Va, м/с |
0% |
50% |
0 |
2 |
4 |
6 |
8 |
10 |
12 |
14 |
16 |
18 |
20 |
22 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Va max |
|
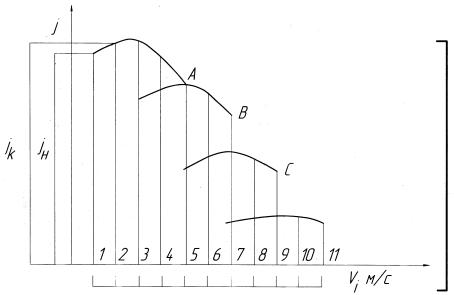
Рис. 2.3. динамический паспорт грузового автомобиля
2.4. Ускорение автомобиля
График ускорений автомобиля при разгоне jа=f(V) строится для полностью груженого автомобиля, движущегося по горизонтальной дороге с асфальтобетонным покрытием в хорошем состоянии.
Величина ускорения автомобиля определяется по формуле
j |
|
|
D |
g |
|
2 |
|
|
а |
|
, м/с |
(2.17) |
|||||
|
|
|
|
|
|
|||
|
|
|
вр |
|
|
|
||
где D – динамический фактор автомобиля (табл. 2.3);
22
– суммарный коэффициент сопротивления движению автомобиля. В данном случае принимается равным коэффициенту сопротивления качению,
т.е. = fV;
g – ускорение свободного падения тела, g=9081 м/с2; δвр – коэффициент учета вращающихся масс.
Коэффициент учета вращающихся масс определяется для каждой передачи по формуле
вр 1,04 0,05 uк2 , |
(2.18) |
где Uк – передаточное число коробки передач.
Подсчет ускорений удобно вести табличным методом, используя данные динамического паспорта автомобиля.
|
|
|
|
|
|
|
|
|
|
Таблица 2.4 |
||
|
|
|
Данные для расчета ускорений автомобиля |
|||||||||
Ω |
V1 |
V2 |
V 3 |
V4 |
D1 |
D2 |
D3 |
D3 |
J1 |
J2 |
J3 |
J4 |
Ωmin |
Vmin |
|
|
|
|
|
|
|
|
|
|
|
Ω2 |
|
|
|
|
|
|
|
|
|
|
|
|
Ω3 |
|
|
|
|
|
|
|
|
|
|
|
|
….. |
|
|
|
|
|
|
|
|
|
|
|
|
ΩV |
|
|
|
Vmax |
|
|
|
|
|
|
|
|
Рис. 2.4. График ускорений грузового автомобиля
23
2.5. Время и путь разгона автомобиля
Время разгона автомобиля определяется с использованием графика ускорений (рис. 2.4). С этой целью кривые ускорений разбиваются на ряд участков ΔV. При этом предполагается, что на каждом участке от V1 до V2, от V2 до V3 и так далее, автомобиль разгоняется с постоянным средним ускорением
jср |
jн jк |
,м/с2, |
(2.19) |
|
2 |
||||
|
|
|
где jн, jк – соответственно, ускорение в начале и конце участка, м/с2.
При изменении скорости на участке от Vк (скорость в конце участка) среднее ускорение равно приращению скорости ΔV, деленному на время ti дви-
жения на участке |
|
|
||
jср |
Vk Vн |
|
V ,м/с2, |
(2.20) |
|
||||
|
ti |
ti |
|
|
где ΔV=Vк–Vн, м/с2.
Для получения допускаемой точности расчетов интервал скоростей должен находиться в пределах от 0,5…0,8 м/с на 1-й передаче до 2,8…4,2 м/с – на высшей передаче; 1,4…2,8 м/с – на промежуточных передачах.
Время движения автомобиля на каждом участке определяется по формуле
tср |
Vi ,с. |
(2.21) |
|
jсрi |
|
Точки А, В, и С пересечения или окончания кривых ускорений на различных передачах определяют скорости, при которых следует производить пересечение передач, чтобы интенсивность разгона была максимальной.
При переключении передачи в процессе разгона происходит разрыв потока мощности от двигателя к ведущим колесам, в результате происходит снижение скорости.
Снижение скорости за время переключения передач определяется форму-
лой
Vnep 9,3tnep , м/с |
(2.22) |
|
Время переключения передач tnep в среднем составит: |
||
- для передач без синхронизатора – tnep |
= 2 … 4 с; |
|
- для передач с синхронизаторами – tnep |
= 1 … 2 с; |
|
- для полуавтоматической трансмиссии – tnep |
= 0,5 с. |
|
Скорость начала разгона на каждой последующей передаче определяется
как
V1 Vn Vnep , м/с |
(2.23) |
24
где Vn – конечная скорость, достигнутая автомобилем при его разгоне на предыдущей передаче, м/с;
Vпер – снижение (потеря) скорости в процессе переключения передачи, м/с. Общее время разгона получается путем суммирования промежутков вре-
мени разгона на отдельных участках
T = t1 + t2 + t3 + …+ ti,с (2.24)
Путь разгона на участке Si определяется при помощи графика (рис. 2.5) времени разгона по формуле
ΔSi = ΔVср ∙ Δtср, м, |
(2.25) |
где ΔVср – средняя скорость на участке в м/с.
Средняя скорость на участке принимается равномерной и определяется
по формуле |
|
|
|
|
V |
|
Vн Vk |
,м/с. |
(2.26) |
|
||||
ср |
2 |
|
|
|
|
|
|
||
Расчет пути разгона производится по тем же участкам по скорости, что и при расчете времени разгона.
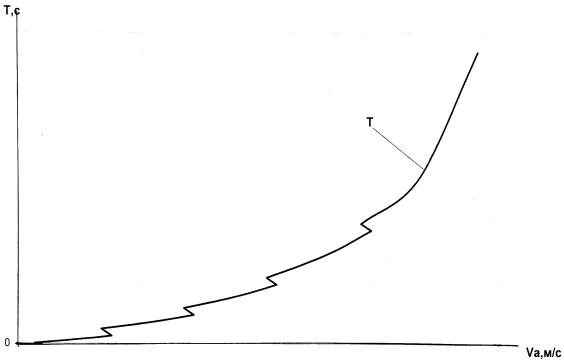
а) время разгона автомобиля
Рис. 2.5, а. График времени разгона автомобиля
25
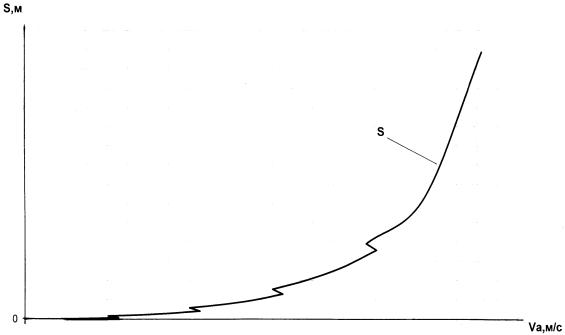
Рис. 2.5, б. График пути разгона автомобиля
Для построения графика времени и пути разгона автомобиля удобно использовать табл. 2.5.
Ниже приводятся графики ускорений автомобиля с поэтапным определением времени и пути разгона.
2.6. Тормозная динамика автомобиля
Для построения графиков необходимо рассчитать время торможения tm путь торможения Sm и полный остановочный путь So по формулам:
tm
где
k |
э |
V |
|
|
|
|
|
|
|
|
|
|
k |
э |
V 2 |
|
|
|
|
o |
,с; (2.29) |
|
|
|
Sm |
|
|
|
|
o |
, м; |
||||||
g( x ) |
|
|
|
|
2g( x ) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
t |
2 |
|
|
|
|
k |
э |
V 2 |
|
|
|
|
|
S |
|
V t |
|
t |
|
|
|
|
|
o |
|
, м, |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
o |
o |
p |
1 |
2 |
|
|
2g( x ) |
|||||||
Vo – скорость автомобиля в начале торможения, м/с; t p – время реакции водителя, равное 0,5 … 1,3 с;
t1 – время срабатывания тормозов:
–для гидравлического привода – 0,1 … 0,2 с;
–для пневматического привода – 0,4 … 0,8 с; t2 – время нарастания замедления – 0,5 … 0,6 с;
k2 1,2...1,4 – коэффициент эффективности действия тормозов.
(2.30)
(2.31)