Материал: 4415
16
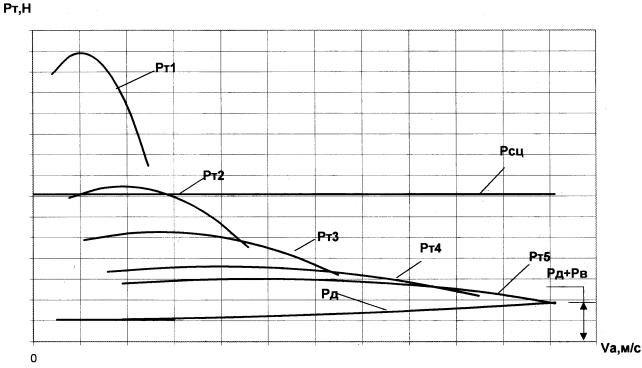
Используя данные табл. 1.6, по выражениям (2.2) и (2.3) определяются, соответственно, значения тяговой силы Рm на ведущих колесах автомобиля и скорости его движения Vа на всех передачах при изменении угловой скорости коленчатого вала двигателя ω от ωmin до ωv. Полученные данные сводятся в табл. 2.1, на основании данных которой строится тяговая характеристика автомобиля, т.е. график зависимости Рm=f(Vа) при движении на всех передачах (кривая Рm на рис. 2.1).
Сила дорожного сопротивления при этом определяется по формуле
Рд Ga , Н, |
(2.4) |
где ψ – коэффициент дорожного сопротивления, который при построении графика тягового баланса здесь принимается равным коэффициенту сопротивления качению fν [см. 1.9].
Сила сопротивления воздуха определяется по формуле
Рв kв F Va2 , Н, |
(2.5) |
где kв и F соответственно коэффициент фронтального аэродинамического сопротивления и лобовая площадь автомобиля;
Va – скорость автомобиля, м/с.
Сила Рв определяется для скоростей движения автомобиля на высшей передаче, т.к. при малых скоростях движения она мала.
|
|
|
|
|
|
|
|
|
|
Таблица 2.1 |
|
|
|
|
Показатели тягового баланса автомобиля |
||||||||
Ω |
V1 |
V2 |
V3 |
V4 |
P1 |
P2 |
P3 |
P4 |
Pд |
Рв4 |
Рд+Рв |
ωmin |
Vmin |
|
|
|
|
|
|
|
|
|
|
Ω2 |
|
|
|
|
|
|
|
|
|
|
|
Ω3 |
|
|
|
|
|
|
|
|
|
|
|
Ωv |
|
|
|
Vmax |
|
|
|
|
|
|
|
По данным табл. 2.1 строится график рис. 2.1 зависимости тяговых сил на колесах от скорости автомобиля, на который наносятся кривые Рд=f(Vа) и Рв=f(Vа). Значение силы сопротивления воздуха Рв откладывается вверх от кривой Рд.
17
Рис. 2.1. График тягового (силового) баланса легкового автомобиля
Чтобы учесть возможность буксования ведущих колес, нужно вычислить для определенного значения коэффициента сцепления φх силу сцепления ведущих колес с дорогой
Рсц R |
вщ |
x , Н, |
(2.6) |
|
|
|
где RZвщ – нормальная реакция на ведущих колесах, Н. Ведущие колеса пробуксовывают, если Рm≥Рсц.
2.2. Мощностной баланс
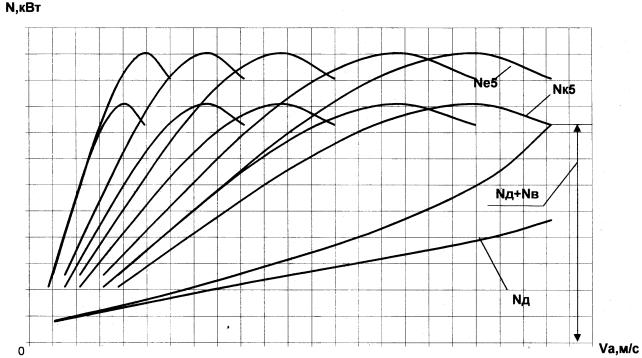
График мощностного баланса автомобиля строится в координатах N–V на основании уравнения
Nк Ne тр Nд Nв Nи ,кВт, |
(2.7) |
где Nk – тяговая мощность на ведущих колесах, кВт;
Nд– мощность, затрачиваемая на преодоление дорожного сопротивления, кВт;
Nв – мощность, затрачиваемая на преодоление воздушного сопротивления, кВт;
Nu – мощность, затрачиваемая на разгон автомобиля, кВт.
Мощность Nu берется со знаком «+» при ускоренном движении и со знаком «-» при замедленном движении.
18
Мощность дорожного сопротивления
Nд |
Ga V Va |
, кВт |
(2.8) |
|
1000 |
||||
|
|
|
Мощность, затрачиваемая на преодоление воздушного сопротивления
Nв |
k |
в |
F V 3 |
|
|
|
a |
, кВт |
(2.9) |
||
|
|
1000 |
|||
|
|
|
|
|
Построение графика мощностного баланса ведется в последовательности, аналогичной построению графика тягового баланса. Все значения и результаты расчетов, необходимые для построения графика мощностного баланса, сводятся в табл. 2.2.
|
|
|
|
|
|
|
|
|
Таблица 2.2 |
|
|
|
Показатели мощностного баланса автомобиля |
|
|
||||||
Ω |
Va1 |
Va2 |
Va3 |
Va4 |
Ne |
Nk |
Nд |
|
Nв |
Nв+Nд |
Ωmin |
Vamin |
|
|
|
|
|
|
|
|
|
Ω2 |
|
|
|
|
|
|
|
|
|
|
Ω3 |
|
|
|
|
|
|
|
|
|
|
….. |
|
|
|
|
|
|
|
|
|
|
Ωv |
|
|
|
Vamax |
|
|
|
|
|
|
Рис. 2.2. График мощностного баланса легкового автомобиля
19
2.3. Динамический паспорт автомобиля
Построение динамического паспорта необходимо начинать с построения динамической характеристики D=f(V).
Вычисление динамического фактора удобно производить табличным способом, используя данные силового баланса.
D |
Pm Pв |
. |
(2.10) |
|
Ga |
||||
|
||||
|
|
|
Результаты расчета значений динамического фактора на отдельных передачах сводятся в табл. 2.3
Таблица 2.3 Показатели динамической характеристики автомобиля
Ω |
V1 |
V2, |
V3, |
V4, |
Pm1 |
Pm2 |
Pm3 |
Pm4 |
Pв1, |
Рв2, |
Рв3, |
Рв4, |
D1 |
D2 |
D3 |
D4 |
|
, |
м/с |
м/с |
м/с |
,Н |
,Н |
,Н |
,Н |
Н |
Н |
Н |
Н |
|
|
|
|
|
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ωmin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ω2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ω3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
….. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ωv |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скорость движения автомобиля V на передачах и соответствующие значения силы тяги Рm принимаются из табл. 2.1 тягового баланса.
Сила сопротивления воздуха при движении автомобиля определяется по формуле 2.5
Рв kв F Va2 , Н.
Имея табл. 2.3 с результатами расчетов значений динамического фактора автомобиля с полной нагрузкой на отдельных передачах, можно построить динамическую характеристику D f (V ) .
Откладываем на оси абсцисс вправо от начала координат значения скорости автомобиля в соответствующем масштабе. По оси ординат вверх от начала координат откладываются значения динамического фактора D в соответствующем масштабе (т.е. определенному значению динамического фактора D =0,1 на шкале ординат соответствует определенная длина отрезка шкалы в мм, например, а = 40 мм).
Затем, используя табличные значения D и V для различных передач, строим динамическую характеристику автомобиля с полной нагрузкой.
Так как при изменении массы автомобиля изменяется и динамический фактор, то для его определения слева от динамической характеристики строится номограмма нагрузки в процентах (масштаб – 1 мм: 1 % нагрузки).

20
С этой целью влево от начала координат на продолжении оси абсцисс откладывается отрезок длиной 100 мм. На этом отрезке по убывающей откладываются проценты загруженности автомобиля. Причем началу координат соответствует полная масса автомобиля со 100 % загруженностью.
Из точки, отстоящей влево от начала координат на удалении 100 мм, означающей нулевую загрузку, проводится вертикальная ось, на которую наносятся значения динамического фактора D о порожнего автомобиля.
Do D Ga . Go
Масштаб ао для шкалы D о находится по формуле
аo а Gо ,
Gа
Где а – масштаб динамического фактора D при полной загрузке автомо-
биля.
После этого одинаковые значения D и D0 соединяются сплошными линиями (т.е. точки, соответствующие D=0,1 при Н=0 и при Н=100 %, соединяются сплошной прямой. Далее таким же образом соединяются точки, соответст-
вующие D=0,2; 0,3;… и т.д.).
Для определения возможности буксования колес при различных нагрузках строится график контроля буксования, совмещаемый при построении с номограммой нагрузок. Динамический фактор по сцеплению определяется по следующим формулам:
D |
Gвщ |
|
|
|
|||||
|
|
x ; |
(2.13) |
||||||
|
|
|
Ga |
|
|||||
|
|
|
|
|
|
||||
D |
|
|
Gовщ |
х , |
(2.14) |
||||
o |
|
|
|
Gо |
|
||||
|
|
|
|
|
|
|
|||
где Dφ – динамический фактор по сцеплению для автомобиля с полной нагрузкой; Dφo – динамический фактор по сцеплению для порожнего автомобиля;
Gвщ, Gовщ – соответственно масса автомобиля, приходящаяся на ведущие колеса автомобиля в полностью груженом и порожнем состоянии, Н. (Gовщ – берется из справочника).
При расчете Dφ и Dφо значения φ принимаются от 0,1 до 0,8. Значения Dφ откладываются на шкале D, а значения Dφо на шкале Dо. Точки с одинаковыми значениями коэффициентов сцепления соединяются штриховыми линиями.
Масштаб "b" номограммы по оси D при полной нагрузке автомобиля (длина отрезка в мм, соответствующая φ= 0,1) определяется из выражения
b a |
Gвщ |
|
|
|
, мм |
(2.15) |
|
|
|
||
|
Gа |
|
|
где а – масштаб динамического фактора D при полной нагрузке автомобиля.