Материал: 3935
|
|
|
|
W ( p) |
K1 K2 K3 |
K4 |
|
. |
|
|
|
||||||
|
|
|
|
1 pT |
1 pT |
1 pT |
|
|
|
|
|||||||
|
|
|
|
|
|
|
2 |
4 |
6 |
|
|
|
|
|
|
||
Uв |
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
J |
|
|
|
K 2 |
|
|
M |
|
|
|
K 3 |
|
||||
|
|
|
K1 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
(1 |
pT2 )(1 |
pT4 ) |
|
|
|
|
1 pT6 |
|
|||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
Uт
K 4
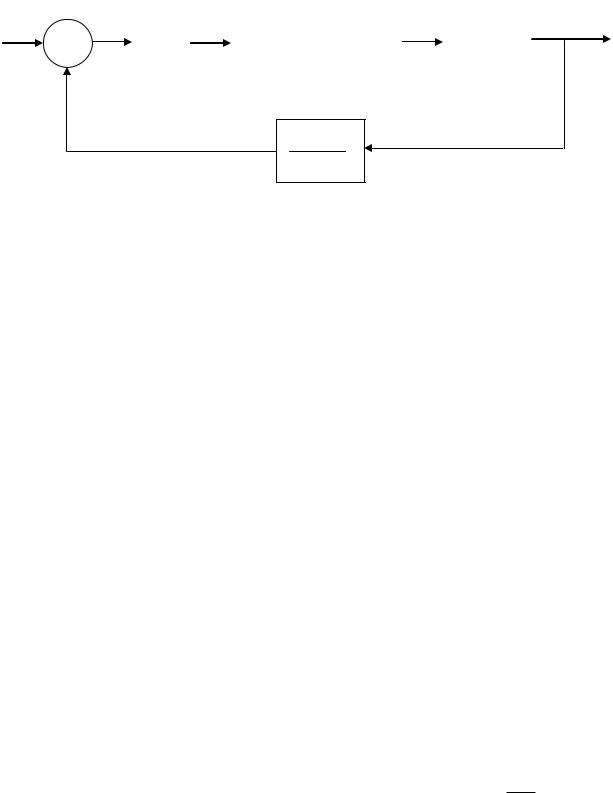
Рис. 4. Структурная схема САУ с П-регулятором (пример)
Заменяя p на j , получим частотную передаточную функцию разомкнутой САУ:
|
|
|
K1 K2 K3 |
K4 |
|
|
|
|||||
W ( j ) 1 j T |
1 j T |
|
1 j T . |
|||||||||
|
2 |
4 |
|
|
|
6 |
|
|
||||
Определяя модуль W ( j ) , получим АЧХ разомкнутой САУ: |
||||||||||||
W ( ) |
|
K1 |
K 2 K3 K 4 |
|
|
. |
||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
1 ( T )2 1 ( T ) |
2 1 ( T )2 |
||||||||||
|
2 |
|
4 |
|
|
|
|
6 |
|
|
||
Определив зависимость от частоты фазового угла, получим выражение для ФЧХ разомкнутой САУ:
F( ) arctg( T2 ) arctg( T4 ) arctg( T6 ) .
Если неизменяемая часть САУ астатическая, то исследуются регуляторы типа П и ПД, а для статических САУ исследуются регуляторы всех четырех вышеприведенных типов.
2.4. Проверочный расчет на ЭВМ динамических характеристик САУ
Расчет динамических характеристик САУ выполняется для проверки правильности подбора регулятора и наглядного подтверждения выполнения заданных требований к качеству регулирования. Данный расчет осуществляется на ЭВМ путем построения графика переходного процесса разработанной САУ и определения на нем параметров качества регулирования S, D, T.
Переходная характеристика САУ получается в результате решения системы дифференциальных уравнений замкнутой САУ с выбранным типом регулятора. Составление и преобразование системы дифференциальных уравнений
11
САУ осуществляется следующим образом. Рассмотрим в качестве примера САУ, структурная схема которой приведена на рис. 5.
|
|
|
1 блок |
|
|
2 блок |
|
|
3 блок |
|||
Uв |
|
U |
|
J |
|
|
|
M |
|
|
|
I |
|
|
|
|
K 3 |
|
|||||||
|
|
K 2 |
|
|||||||||
|
|
|
K1 |
|
|
|
|
|
||||
|
|
|
|
|
(1 pT2 )(1 pT4 ) |
|
1 pT6 |
|
||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||
Uт
4 блок
K 4
1 pT8
Рис. 5. Структурная схема САУ (пример)
Формирование системы уравнений начинают с последнего блока прямой ветви структурной схемы:
T |
dI |
I K |
|
M - для блока 3, |
|
|
||||||||||
|
|
|
|
|||||||||||||
6 dt |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
T T |
d 2 M |
(T |
T ) |
dM |
M K |
|
J - для блока 2, |
|||||||||
|
|
|
2 |
|||||||||||||
2 |
4 |
dt |
2 |
|
|
|
2 |
|
|
4 |
|
dt |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
J K1U - для блока 1, |
|
|
|
|
||||||||||||
U U в U т - для блока сравнения, |
||||||||||||||||
T |
dU т |
U |
т |
K |
4 |
I - для блока обратной связи 4. |
||||||||||
|
||||||||||||||||
8 |
dt |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Исключим алгебраические уравнения путем подстановки и получим следующую систему:
T |
dI |
I K |
|
M ; |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
6 dt |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
||
T T |
d 2 M |
(T T ) |
dM |
M K |
K (U |
|
U |
|
) ; |
|||||||||
|
|
|
в |
т |
||||||||||||||
2 |
4 |
|
dt |
2 |
|
|
|
2 4 |
dt |
|
2 1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
T |
dU т |
U |
т |
K |
4 |
I . |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||||||||
8 |
dt |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Для решения указанной системы методом Рунге-Кутта необходимо, чтобы система содержала только уравнения 1-го порядка, разрешенные относи-
тельно производных. Для этого введем новую переменную y dMdt и разрешим полученную систему относительно производных:
12

dIdt (K3M I ) / T6 ; dMdt y ;
dydt (K 2 K1(U в U т ) M y(T2 T4 )) / T2T4 ;
dU т (K 4 I U т ) / T8 . dt
Для решения полученной системы дифференциальных уравнений САУ необходимо знание начальных условий. Так как целью является построение переходной характеристики САУ, являющейся результатом ее реагирования на входное единичное ступенчатое воздействие, то в качестве начальных условий можно принять следующие: Uв 1,Uт 0, M 0, y 0, I 0.
3 СТРУКТУРНЫЕ СХЕМЫ
При разработке структурной схемы измерительного канала следует обращать внимание на то, каким образом будет передаваться измерительный сигнал, где будут размещаться модули обработки информации, какова должка быть взаимосвязь между ними и какова будет блочно-иерархическая структура канала измерения.
Пример разработки структурной схемы изображен на рис. 6. Схема включает в себя промышленный ПК с ПО «ОИК Диспетчер НТ», позволяющий осуществлять сбор, обработку и накопление всех видов телеинформации (включая информацию от цифровых преобразователей, устройств РЗиА, центральной сигнализации, учета энергии и пр.) непосредственно на объекте, организовывать локальные рабочие места для персонала и обеспечивать поставку информации на системы верхнего уровня по неограниченному числу каналов связи.
Пример описания функциональных возможностей:
Такое исполнение КП подходит для крупных подстанций.
Передача на верхний уровень может осуществляться по стандартным про-
токолам ГОСТ Р МЭК 60870-5-101 / 104, по фирменному протоколу INTERLINK и другим — список поддерживаемых протоколов обмена;
Синхронизация реального времени на уровне КП осуществляется средствами контроллера «Синком-IP4» или добавлением в комплектацию измерительного контроллера «Синком-IPT»;
При необходимости передачи данных на верхний уровень по распространѐнным ранее протоколам («Гранит», «Компас», «ТМ-512») применяется мостовой контроллер;
Пример размещения аппаратуры КП в монтажном шкафу;
13
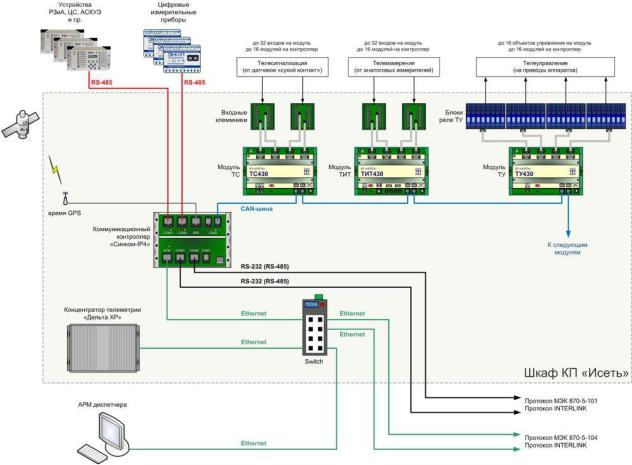
Аппаратура КП может быть при необходимости разнесена на несколько шкафов при помощи расширения CAN-шины или оптических удлинителей.
Рис. 6 Структурная схема командного пункта «Исеть»
Структурные схемы представляют собой графическое изображение структуры измерения сигналов и управления. Структурные схемы в виде прямоугольников и окружностей изображают основные подразделения объекта измерения с указанием их наименования, основные узлы систем измерения и управления (датчики, исполнительные устройства, подсистемы контроля, сигнализации и т.п.), вычислительные комплексы и линии связи между отдельными элементами системы управления с указанием (стрелкой) направления передачи информации или воздействий. Для простых объектов допускается не разрабатывать структурные схемы управления, ограничиться только измерительной частью, но в этом случае в пояснительной записке необходимо давать соответствующие пояснения структуры измерения и управления.
14
4 СХЕМЫ АВТОМАТИЗАЦИИ
4.1 ОБЩИЕ ПОЛОЖЕНИЯ И УКАЗАНИЯ
Схема автоматизации является обязательным документом любого (в том числе дипломного) проекта по автоматизации технологических процессов и оборудования.
На схеме должны быть отражены основные решения по автоматизации, принятые в проекте, а именно:
-объѐм автоматизации объекта (то есть показаны все технологические процессы, установки и линии, охватываемые автоматизацией);
-виды автоматизации отдельных установок и операций (автоматический контроль, организация, управление, регулирование);
-значения контролируемых в регулируемых параметров (номинальные и предельные);
-блочно-функциональная; структура отдельных цепей и подсистем автоматизации;
-размещение средств автоматизации на щитах, пультах и технологическом оборудовании.
Вдипломных и курсовых проектах необходимо в максимально возможной степени использовать схемы автоматизации типовых проектов для технологических процессов предприятий лесного комплекса, привязывая их к конкретным объектам и условиям, пополняя и уточняя в части значений контролируемых и регулируемых параметров, а также комплектующих изделий. С такими проектами можно ознакомиться на предприятиях по месту прохождения практик, на выпускающих кафедрах, в том числе на кафедре автоматизации производственных процессов ВГЛТА, проектных организациях г. Воронежа.
При использовании типовых проектов и литературы более раннего издания необходимо помнить, что они оформлены в соответствии с требованиями устаревших нормативных документов и, как правило, нуждается в существенной корректировке, особенно в части условных обозначений средств автоматизации. Следует помнить также и о том, что в типовых проектах и в литературе схемы автоматизации называются функциональными схемами автоматизации.
4.2СОСТАВ И КОМПОНОВКА ЧЕРТЕЖА СХЕМЫ
При курсовом и дипломном проектировании схема выполняется на листах формата А1, в случаях незначительной сложности функциональной схемы допускается для специальностей кроме АТП, на одном листе формата А1 выполнять схему автоматизации и принципиальную схему управления. При этом весь чертеж следует называть (в основной надписи) "Схемы автоматизации", а названия схемы автоматизации и принципиальной схемы привести над ними на поле чертежа.
Чертеж схемы автоматизации в общем случае включает в себя - основную надпись;
15