Материал: 3935
Вуказанных разделах курсового проекта должны быть отражено следующее. В задании (ориентировочный объем – 1 стр.) приводится название темы, структурная схема САУ и полученные от руководителя исходные данные для проведения расчетов. Во введении (ориентировочный объем – 1 стр.) формулируется цель курсового проекта и перечень необходимых для ее достижения частных задач исследований. Основная часть (ориентировочный объем – 20-25 стр.) должна включать:
- результаты анализа и выбора необходимых методов исследования (расчета) САУ в частотной и временной областях и краткое описание существа использованных в работе методов;
- результаты анализа САУ с различными типами регуляторов (приводятся математические модели САУ в виде структурной схемы и выражений для частотных характеристик, а также результаты моделирования в графической форме с необходимыми пояснениями);
- алгоритм и результаты сравнительной оценки вариантов САУ с регуляторами различных типов и выбора наиболее подходящего регулятора;
- результаты анализа разработанной САУ во временной области (приводятся динамическая математическая модель САУ в виде системы дифференциальных уравнений, алгоритм или программа ее решения на ЭВМ и результат решения в виде графика переходного процесса).
Взаключении (ориентировочный объем – 1 стр.) приводятся выводы по проделанной работе.
Пояснительная записка оформляется на листах формата А4 и представляется на проверку в сброшюрованном виде.
При выполнении курсового проекта студенты пользуются учебной и на- учно-технической литературой рекомендуемой в библиографическом списке.
2. ОСНОВНЫЕ ПОЛОЖЕНИЯ МЕТОДИКИ РАЗРАБОТКИ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
2.1. Теоретические основы методики
Данная методика базируется на основных положениях теории автоматического управления (регулирования), заключающихся в следующем:
- САУ устойчива, если модуль комплексной АЧХ W ( ) разомкнутой САУ при изменении частоты пересекает уровень W ( ) 1 при меньшем
значении , чем ФЧХ F ( ) пересекает уровень F( ) 1800 ( ) ;
- динамические свойства САУ определяются главным образом участками АЧХ и ФЧХ вблизи частоты среза с - частоты, на которой АЧХ W ( ) дости-
гает значения W ( с ) 1;
6
- с ростом частоты с увеличивается быстродействие САУ (уменьшается время регулирования T). Значения с и T связаны приближенным соотношением
T(2 4) / c ;
-в правильно спроектированной САУ АЧХ W ( ) должна убывать в зави-
симости от вблизи частоты с обратно пропорционально первой степени
частоты
W ( ) 1/ ,
или то же самое, со скоростью -20дБ/дек. Протяженность интервала изменения , для которого выполняется данное условие, должна быть не менее одной декады;
- для обеспечения величины перерегулирования D (10 30)% необхо-
димо иметь запас по фазе F0 на частоте |
с |
не менее |
(30 50)0 , а также запас |
|
|
|
|
по амплитуде не менее 20дБ. |
|
|
|
2.2. Порядок исследования САУ с регуляторами различных типов
В задании на курсовой проект приведены:
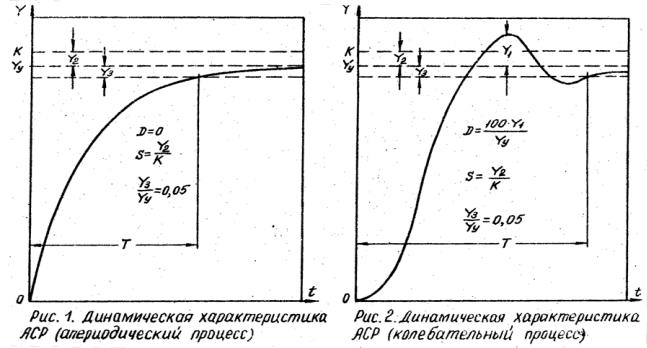
-требуемая точность в статистическом режиме (допустимая величина статистической ошибки) S в относительных единицах;
-допустимая величина перерегулирования (динамического выброса) D в процентах;
-требуемое быстродействие (допустимая продолжительность переходного процесса) T в секундах.
Определение данных величин наглядно представлено на рис. 1 и 2.
7
Оценка параметров качества САУ с различными типами регуляторов осуществляется следующим образом. В структурную схему заданной САУ включается оцениваемый регулятор (П, ПД, ПИ или ПИД). Оценивается запас по фазе F0, необходимый для обеспечения перерегулирования, не превосходящего заданного значения D. Для САУ с активной обратной связью величину F0 рассчитывают по эмпирической формуле
F0 0,82 (82 D) ,
а для САУ с комплексной обратной связью по формуле
F0 0,535 (126 D) ,
где F0 в градусах, а D в процентах.
Далее находится частота среза с как частота, на которой запас по фазе равен F0. Для этого надо решить относительно уравнение
F( ) F0 1800 .
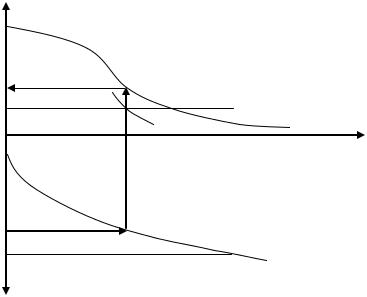
В общем случае решение данного уравнения можно выполнить графически. Для этого необходимо построить графики W ( ) и F ( ) (рис.3).
W( )
W( с ) |
|
b |
|
|
|
1 |
c |
|
|
|
|
0 |
с |
|
|
F0-180 |
0 |
a |
|
|
-1800
Рис. 3. Графическое решение задачи определения с и k1
Далее, откладывая по оси ординат графика F ( ) угол, равный F0 1800 , находим точку "а" на графике F ( ) . Абсцисса , соответствующая этой точке, и есть частота среза с , необходимая для обеспечения запаса по фазе F0 и,
следовательно, для обеспечения допустимого перерегулирования D.
Затем находится точка "b" на графике W ( ) и по шкале оси ординат графика W ( ) находится фактическое значение коэффициента передачи W ( с ) разомкнутой САУ на найденной частоте среза с . Последовательность графи-
8
ческого решения показана на рис.3 стрелками. Требуемое значение коэффициента передачи регулятора k1 рассчитывается по формуле
k1 1/W ( c ) .
С учетом k1 график АЧХ САУ с регулятором пройдет, как показано на рис.3., пунктиром (через точку "с").
После нахождения с и k1 выполняется оценка параметров качества ре-
гулирования.
Если САУ астатическая, статическая ошибка Sф=0 и условие Sф S вы-
полняется автоматически. Если САУ статическая, то Sф рассчитывается по формуле
m
Sф 1/(1 ki ) , i 1
где m – число звеньев в структурной схеме САУ, включая регулятор.
Для того чтобы регулятор рассматриваемого типа удовлетворял требованиям задания по точности регулирования, необходимо выполнение условия -
Sф S .
Фактическое значение времени регулирования Tф рассчитывается по
формуле
Tф 2 / c .
Регулятор рассматриваемого типа считается удовлетворяющим требованиям задания по быстродействию, если выполняется условие Tф T .
Фактическое значение перерегулирования Dф не проверяется; считается, что неравенство Dф D выполняется, если запас по фазе выбран по вышепри-
веденным формулам. Результаты расчетов для САУ с регуляторами всех типов сводятся в общую таблицу (в качестве примера приведена табл.). На основе ее анализа делается выбор типа регулятора. Если заданным требованиям удовлетворяют регуляторы нескольких типов, то предпочтение по критерию "эффек- тивность-стоимость" отдается более простому регулятору, являющемуся более дешевым и надежным в эксплуатации.
Таблица 1 Результаты расчета САУ с регуляторами различных типов
|
Состав АСР |
S |
T |
D |
1 |
САУ с П-регулятором |
0,072 |
2,3 |
15 |
2 |
САУ с ПД-регулятором |
0,028 |
0,15 |
15 |
3 |
САУ с ПИ-регулятором |
0 |
3,2 |
15 |
4 |
САУ с ПИД-регулятором |
0 |
0,45 |
15 |
|
Задано |
0,03 |
0,6 |
15 |
9

Выбор постоянных времени регуляторов, более сложных, чем простейший регулятор П-типа, преследует цель улучшить параметры качества регулирования, обеспечиваемые САУ. Для увеличения быстродействия САУ в случаях использования ПД - и ПИ-регуляторов используют следующие методы выбора постоянной времени регулятора T1:
1) |
T |
|
T 2 |
, где Tj – постоянные времени всех динамических звеньев |
|
1 |
|
j |
|
|
|
|
j |
|
САУ, за исключением регулятора; |
||||
2) |
T1 |
max T j |
(T1 выбирают равной максимальной постоянной времени в |
|
|
|
|
j |
|
САУ).
Для ПИД-регулятора необходимо выбрать две постоянные времени – T1 и T3. Значительного улучшения быстродействия САУ можно добиться, если выбрать в качестве их значений наибольшие значения постоянных времени заданной САУ. При этом T1 T3 .
2.3.Математические модели разомкнутых САУ
срегуляторами различных типов
Вп.2.1, 2.2 показано, что о свойствах САУ с регуляторами различных типов можно судить по их амплитудно-частотным W ( ) и фазо-частотным F ( )
характеристикам. В рамках курсового проекта для построения графиков W ( ) и F ( ) целесообразно воспользоваться следующими математическими моде-
лями регуляторов:
- передаточная функция П-регулятора имеет вид
W ( p) K1;
- передаточная функция ПД-регулятора имеет вид
W ( p) K1 1 pT1 ;
- передаточная функция ПИ-регулятора имеет вид
W ( p) K1 1 pT1 ; p
- передаточная функция ПИД-регулятора имеет вид
W ( p) K1 1 pT1 1 pT3 . p
Выражения для АЧХ и ФЧХ получают из выражения для передаточной функции разомкнутой САУ. Для САУ, структурная схема которой приведена на рис.4, выражение для передаточной функции разомкнутой САУ получают, перемножая передаточные функции всех динамических звеньев, образующих контур регулирования:
10