Материал: 3593
Последнее обусловлено тем, что э.д.с. ЕG и создаваемый генератором момент сопротивления М с на валу двигателя пропорциональны скорости
двигателя и току генератора iн соответственно, т.е. ЕG ceω, M c cмiн , где се и см – постоянные генератора.
Таким образом, изменение нагрузки Rн приводит к изменению всех переменных объекта управления, и в том числе напряженияU н , от своих номинальных значений. В результате на выходах сумматоров появляются напряжения, пропорциональные этим отклонениям, по которым в регуляторе формируется управляющее напряжение u. Под действием
суммарного напряжения U 0 |
u скорость приводного двигателя |
m |
|
обеспечивает новое значение э.д.с. генератора, и напряжение на нагрузке становится близким к заданному.
Исходные данные для проектирования приведены в таблице 2.
Примечания:
1. В качестве объекта управления в этой системе принять систему двигатель-генератор (Д-Г) совместно с усилителем мощности (СУМ).
2. Считать СУМ по управляющему входу пропорциональным звеном с коэффициентом передачи ky 10 .
3. При составлении математической модели и при анализе системы принять, что изменение нагрузки Rн носит ступенчатый характер и
является отрицательным, так что полное сопротивление в цепи якоря генератора после изменения Rн составит Rя RG Rн0 Rн .
4. При анализе и синтезе данной системы использовать описание объекта управления в отклонениях от номинального режима.
3. Позиционная следящая система
Данные системы применяются для дистанционного управления различными объектами наведения (оптическими телескопами, радиолокационными антеннами и т.д.).
11
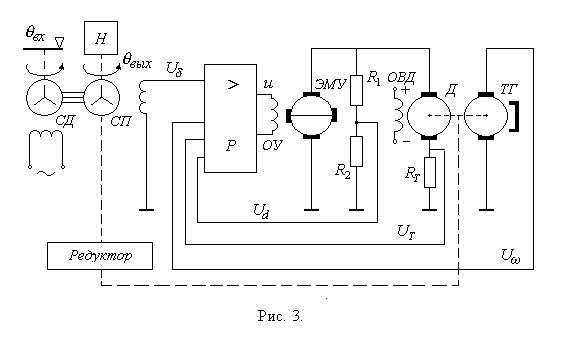
Принципиально-функциональная схема следящей системы изображена на рис. 3.
Система содержит: исполнительный двигатель постоянного тока (Д), соединенный с нагрузкой (Н) через редуктор, усилитель мощности, в качестве которого используется электромашинный усилитель (ЭМУ), и регулятор (Р). На регулятор помимо сигнала U с измерителя рассогласования, в качестве которого используется сельсинная пара СДСП, могут подаваться: напряжение Uω с тахогенератора, пропорциональное скорости вращения двигателя; напряжение Ud c делителя R1, R2, пропорциональное напряжению с выхода ЭМУ; напряжение UT , пропорциональное якорному току двигателя.
Система работает следующим образом. Входной вал системы поворачивается по заданному закону вх ( t) . При этом вращается сельсиндатчик СД, жестко связанный с входным валом. С выходной осью системы жестко связан сельсин-приемник СП. При появлении рассогласования между СД и СП вх вых 0 с выходной обмотки сельсин-приемника снимается напряжение U , пропорциональное этому рассогласованию.
Это напряжение усиливается и преобразуется в регуляторе, после чего с помощью ЭМУ усиливается по мощности и подается на исполнительный двигатель, который начинает вращаться таким образом, чтобы уменьшить имеющееся рассогласование. После окончания переходного процесса система отслеживает заданную программу движения, так что выходной вал системы поворачивается по закону вых( t ), близкому к заданному вх ( t) .
12
Исходные данные для проектирования приведены в таблице 3.
Примечания:
1.В качестве объекта управления принять исполнительный двигатель
средуктором и усилителем мощности. Моментом сопротивления на валу двигателя пренебречь.
2.При составлении математической модели объекта управления принять, что ЭМУ представляется апериодическом звеном с постоянной времени Тэму и коэффициентом передачи К эму . При этом, если в таблице
исходных данных значение Тэму отсутствует, то для соответствующего варианта Тэму считается пренебрежимо малой, и электромашинный усилитель в этом случае следует принять пропорциональным звеном.
3.Если в таблице исходных данных не задана индуктивность якорной обмотки двигателя, то для соответствующего варианта ее следует считать пренебрежимо малой.
4.При нахождении параметров регулятора (при синтезе закона управления) считать, что задающее воздействие вх ( t) принадлежит к
классу неопределенных и задается предельными характеристиками max и
εmax.
5. При анализе временных показателей качества (при построении переходного процесса) принять закон изменения входного воздействия в виде
maxt , при t 0 |
||
вх ( t ) |
0 , |
при t 0 |
|
||
13
Таблица 3
|
|
Параметр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
ы |
|
|
|
Показатели |
|
|
Параметры привода |
|
|
Параметры измерителей |
|||||||||||
|
задающего |
|
качества |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
воздейств |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
№ |
|
|
ия |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ва |
|
Ско |
|
Уск |
Ош |
|
Пок |
Рад |
Коэ |
Пос |
Инд |
Акт |
Моме |
Постоянн |
Пер |
Коэ |
Коэ |
|
|
|
||||
рост |
|
оре |
ибк |
|
азат |
иус |
ф. |
т. |
укти |
ивн |
нт |
ые |
едат |
ф. |
ф. |
|
|
|
||||||
ри |
|
|
|
|
|
|||||||||||||||||||
|
ь |
|
ние |
а |
|
ель |
усто |
пере |
вре |
вн. |
ое |
инерц |
двигателя |
очн |
пер |
пер |
|
|
|
|||||
ан |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
сле |
|
коле |
йчи |
дач |
мен |
якор |
соп |
. |
|
|
ое |
еда |
еда |
|
|
|
|
та |
|
|
|
|
|
|
|
|
приве |
|
|
числ |
чи |
чи |
|
|
|
|||||||
|
|
|
|
|
|
|
|
жен |
|
бате |
вост |
и |
и |
я |
р. |
ден. к |
|
|
о |
сель |
тах |
|
|
|
|
|
|
|
|
|
|
|
ия |
|
льн |
и |
ЭМ |
ЭМ |
двиг |
якор |
|
|
|
|
|
||||
|
m ax |
|
m ax |
|
двига |
|
|
реду |
син |
оге |
R1 |
R2 |
RТ |
|||||||||||
|
|
|
|
ости |
R* |
У |
У |
. |
н. |
телю |
се |
см |
ктор |
пар |
нер |
|||||||||
|
|
|
|
|
|
|
||||||||||||||||||
|
|
рад |
|
рад |
|
|
М * |
|
|
|
|
цеп |
Jд |
в сек |
нм/а |
а |
ы |
ат. |
кОм |
кОм |
Ом |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
сек |
|
|
2 |
|
* |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
сек |
|
|
сл |
|
|
|
Кэму |
Тэм у |
Lя |
и |
н м |
|
|
iр |
Ксп |
К тг |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
10 3 |
|
|
|
|
сек |
гн |
Rя |
сек2 |
|
|
|
в / рад |
в сек |
|
|
|
|
|
|
|
|
|
|
|
рад |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ом |
|
|
|
|
|
|
|
|
|
1 |
0.1 |
|
0.05 |
1.0 |
|
1.3 |
- |
3.0 |
0.3 |
- |
2.0 |
0.02 |
0.35 |
0.21 |
120 |
20 |
0.1 |
- |
- |
- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
0.2 |
|
0.07 |
3.0 |
|
- |
0.87 |
1.5 |
- |
2.0 |
2.5 |
0.02 |
0.31 |
0.2 |
100 |
30 |
0.2 |
- |
- |
- |
||||
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
0.4 |
|
0.1 |
|
4.0 |
|
1.2 |
- |
1.0 |
0.8 |
- |
1.8 |
0.02 |
0.4 |
0.19 |
80 |
40 |
- |
5.1 |
6.1 |
- |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
4 |
0.6 |
|
0.12 |
5.0 |
|
- |
0.8 |
0.5 |
- |
0.9 |
1.9 |
0.03 |
0.42 |
0.25 |
60 |
50 |
0.3 |
- |
- |
- |
||||
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
14
5 |
0.8 |
0.14 |
6.0 |
1.35 |
- |
3.0 |
- |
1.4 |
2.4 |
0.01 |
0.31 |
0.18 |
80 |
60 |
0.4 |
- |
- |
- |
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
6 |
1.0 |
0.16 |
7.0 |
- |
0.78 |
1.5 |
0.2 |
- |
2.8 |
0.01 |
0.25 |
0.25 |
100 |
70 |
0.2 |
- |
- |
- |
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
7 |
0.8 |
0.08 |
8.0 |
1.4 |
- |
2.0 |
0.1 |
- |
2.0 |
0.01 |
0.28 |
0.15 |
120 |
80 |
0.3 |
- |
- |
- |
8 |
0.6 |
0.08 |
5.0 |
- |
0.75 |
1.0 |
- |
1.5 |
2.5 |
0.02 |
0.41 |
0.21 |
100 |
90 |
0.1 |
- |
- |
- |
9 |
0.4 |
0.12 |
6.0 |
1.2 |
- |
0.5 |
- |
1.6 |
2.1 |
0.03 |
0.38 |
0.22 |
80 |
100 |
0.2 |
- |
- |
- |
10 |
0.2 |
0.1 |
4.0 |
- |
0.85 |
1.5 |
0.5 |
- |
1.5 |
0.01 |
0.26 |
0.13 |
90 |
90 |
- |
3.4 |
4.2 |
- |
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
11 |
0.1 |
0.04 |
1.5 |
1.3 |
- |
2.0 |
- |
1.4 |
1.8 |
0.04 |
0.35 |
0.28 |
80 |
80 |
0.4 |
- |
- |
- |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
12 |
0.2 |
0.09 |
3.0 |
- |
0.7 |
1.0 |
- |
1.5 |
1.9 |
0.02 |
0.32 |
0.15 |
100 |
70 |
0.2 |
- |
- |
- |
13 |
0.4 |
0.05 |
2.0 |
1.15 |
- |
2.5 |
0.3 |
- |
2.3 |
0.03 |
0.4 |
0.21 |
120 |
60 |
0.1 |
- |
- |
- |
14 |
0.5 |
0.06 |
6.0 |
- |
0.85 |
3.0 |
- |
1.3 |
2.2 |
0.02 |
0.4 |
0.19 |
140 |
50 |
- |
- |
- |
1.6 |
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
15 |
0.8 |
0.1 |
5.0 |
1.3 |
- |
2.0 |
0.7 |
- |
2.1 |
0.01 |
0.35 |
0.15 |
100 |
40 |
- |
2.5 |
2.5 |
- |
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
15