Материал: 2416
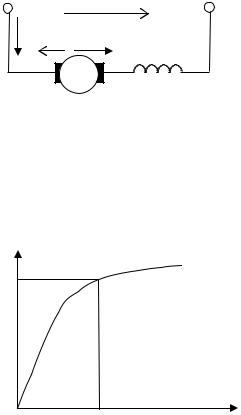
Поэтому магнитный поток Ф является некоторой функцией тока якоря Iя. Характер этой функции изменяется в зависимости от нагрузки на валу двигателя.
Двигатели постоянного тока с последовательным возбуждением рассчитаны на работу с номинальной нагрузкой в насыщенной области характеристики намагничивания.
Двигатели, работающие в ненасыщенной области характеристики, имеют повышенные габариты.
Так как обмотка якоря двигателя с последовательным возбужде- n нием включена последовательно с обмоткой возбуждения, то уравнение электрического состояния дви-
гателя будет иметь вид
U=E+Iя(Rя+Rв). (9.23)
Из уравнения (9.5) с учетом
(9.23)
Iя |
n = |
U − I я( Rя |
+ Rв ) |
. (9.24) |
||
Рис. 9.13. График скоростной |
СеФ |
|
|
|||
|
|
|
|
|||
Это уравнение является уравне- |
||||||
характеристики двигателя |
нием скоростной характеристики |
|||||
постоянного тока с |
||||||
двигателя постоянного тока с после- |
||||||
последовательным возбуждением |
||||||
|
довательным возбуждением. |
|||||
n |
На рис. 9.13 показан график |
|||||
|
скоростной характеристики n=f3(Iя). |
|||||
|
В отличие от двигателя с парал- |
|||||
|
лельным возбуждением у двигателя |
|||||
|
с последовательным |
возбуждением |
||||
магнитный поток не является вели-
|
М |
|
чиной постоянной. |
|
||||
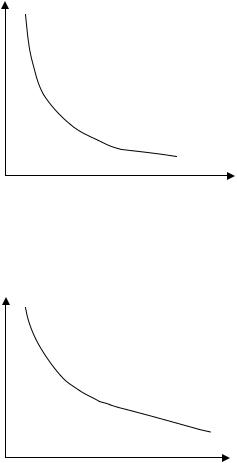
Рис. 9.14. График механической |
|
Из уравнения (9.1) |
|
|||||
|
I я = |
М |
. |
(9.25) |
||||
характеристики двигателя |
|
|||||||
|
|
|||||||
постоянного тока с |
|
|
|
СМФ |
|
|||
|
Произведем |
подстановку из |
||||||
последовательным возбуждением |
|
|||||||
ние (9.24): |
|
уравнений (9.25) |
и (9.15) |
в уравне- |
||||
|
0,105 М ( Rя + Rв ) |
|
|
|
|
|||
n = |
U |
|
− |
. |
|
|
(9.26) |
|
СеФ |
|
|
|
|||||
|
|
( СеФ)2 |
|
|
|
|||
202
Уравнение (9.26) является уравнением механической характеристики двигателя постоянного тока с последовательным возбуждением.
На рис. 9.14 представлен график этой характеристики. Из графика видно, что механическая характеристика двигателя с последова-
тельным возбуждением |
является |
|
|
– |
|
«мягкой». При малых |
нагрузках + |
|
U |
||
|
|
||||
частота вращения n резко возраста- |
|
|
|
||
ет (двигатель идет «вразнос»). По- |
|
Rд |
|
||
этому эти двигатели без нагрузки на |
Е |
|
|||
Iя=Iв |
|
||||
валу включать нельзя. |
|
|
|||
|
|
|
|
||
Несмотря на этот недостаток, |
Rя |
Rв |
|
||
такие двигатели применяются в |
|
||||
электроприводах с тяжелыми усло- |
Рис. 9.15. Схема электрическая |
||||
виями пуска, работающих при из- |
принципиальная двигателя |
|
|||
менениях нагрузочного |
момента |
постоянного тока с |
|
||
в широких пределах. В этом слу- |
последовательным возбуждением |
||||
с добавочным сопротивлением |
|||||
чае выбирается режим работы, при |
|||||
|
|
|
|||
котором величина магнитного потока близка к значению насыщения. Пусковой ток
Iп = |
|
|
U |
, |
(9.27) |
R |
я |
+ R |
|||
|
|
в |
|
|
несмотря на включенную последовательно с обмоткой якоря обмотку возбуждения, достигает весьма больших значений.
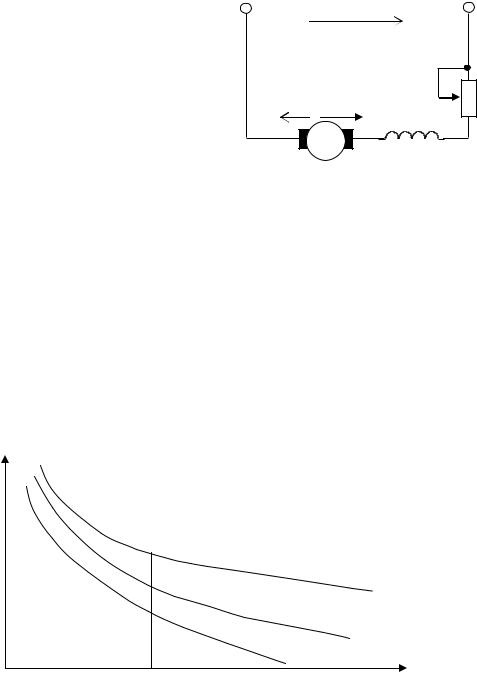
n
Rд=0
Rд1>0
Rд2> Rд1 |
М |
Мн
Рис. 9.16. Графики механических характеристик двигателя при введении в цепь якоря и обмотки возбуждения добавочных сопротивлений
203
Для ограничения Iп в цепь якоря и обмотки возбуждения на время пуска вводят пусковое сопротивление Rд (рис. 9.15), при этом пусковой ток уменьшается до величины, равной
Iп = |
|
|
U |
|
. |
(9.28) |
R |
я |
+ R |
+ R |
|||
|
|
в |
д |
|
||
По мере разгона двигателя пусковое сопротивление ступенчато уменьшают. Графики механических характеристик двигателя при введении в цепь якоря и обмотки возбуждения добавочных сопротивлений представлены на рис. 9.16.
Для построения искусственных механических характеристик двигателя с последовательным возбуждением пользуются универсальными характеристиками n=f4(I) и M=f5(I), которые даются заводомизготовителем на основании опытных данных для серии выпускаемых двигателей.
За 100% в графиках данных характеристик взяты номинальные величины момента на валу двигателя, частоты вращения и тока.
9.8. Регулирование частоты вращения двигателя постоянного тока с последовательным возбуждением
Как и в двигателях с параллельным возбуждением, в двигателях с последовательным возбуждением применяется три способа регулирования частоты вращения:
– введением добавочного сопротивления в цепь якоря и обмотки возбуждения;
– изменением магнитного потока Ф;
– изменением подводимого напряжения.
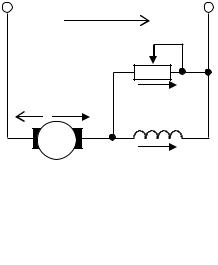
+ |
U |
– |
При введении добавочных сопро- |
|||
тивлений в цепь якоря и обмотки воз- |
||||||
|
|
|
||||
|
Rр |
|
буждения (см. рис. 9.15) получаются |
|||
|
|
|
искусственные |
механические |
характе- |
|
Е Iя |
Iш |
|
ристики. При одном и том же моменте |
|||
|
Rв |
|
большему значению добавочного со- |
|||
|
|
|
противления |
соответствует |
меньшее |
|
Rя |
Iв |
|
значение частоты вращения (см. рис. |
|||
Рис. 9.17. Регулирование |
|
9.16). |
|
|
||
|
Недостатками такого способа регу- |
|||||
частоты вращения |
|
|||||
изменением магнитного |
|
лирования, как и для двигателя с па- |
||||
|
потока |
|
раллельным возбуждением, являются: |
|||
|
|
|
204 |
|
|
|