Материал: 2416
или
I я = |
U − Е |
, |
(9.4) |
|
|||
|
Rя |
|
|
где Rя – сопротивление якоря.
Из уравнения (9.4) видно, что ток якоря зависит не только от напряжения, но и от ЭДС. В режиме двигателя Uя>Е.
9.2.2. Режим генератора
Для получения режима генератора необходимо привести во вращение якорь машины постоянного тока. При вращении якоря в магнитном поле в обмотке якоря наводится ЭДС
Е=СеФn. (9.5)
Магнитный поток Ф зависит от величины тока возбуждения Iв. При подключении к обмотке якоря нагрузки напряжение на выходе генератора всегда меньше ЭДС якоря на величину падения напряжения в самом якоре IяRя.
Уравнение электрического состояния цепи якоря в режиме генератора имеет вид
U=E–IяRя. (9.6)
Взаимодействие тока якоря с магнитным полем машины приводит к появлению электромагнитного момента, который в режиме генератора будет тормозным.
9.3.Реакция якоря
Сувеличением электрической нагрузки на генератор и механической нагрузки на двигатель возрастает ток якоря.
Реакция якоря – это воздействие тока якоря на систему возбуждения машины. При этом происходит искажение магнитного поля машины, проявляющееся обычно в уменьшении магнитного потока машины Ф.
Действие реакции якоря обуславливает необходимость увеличения тока возбуждения с ростом нагрузки для того, чтобы поддерживать неизменным магнитный поток машины Ф.
Для уменьшения реакции якоря машины постоянного тока снабжаются дополнительными полюсами, которые устанавливаются на станине машины по линии геометрической нейтрали. Обмотки дополнительных полюсов соединяются через щетки последовательно с
195
обмоткой якоря так, чтобы направление вектора напряженности магнитного поля от дополнительных полюсов было противоположно направлению вектора напряженности магнитного поля, возникающего из-за реакции якоря. Тем самым компенсируется действие реакции якоря.
Так как магнитное поле дополнительных полюсов создается током якоря, компенсация реакции якоря происходит автоматически при любых нагрузках машины.
9.4. Классификация машин постоянного тока по способу возбуждения
В зависимости от способа соединения обмотки якоря с обмоткой возбуждения различают машины постоянного тока:
–с независимым возбуждением;
–с параллельным возбуждением;
–с последовательным возбуждением;
–со смешанным возбуждением.
Иногда в машинах постоянного тока малой мощности вместо обмоток возбуждения используются постоянные магниты.
9.5.Характеристики двигателя постоянного тока
спараллельным возбуждением
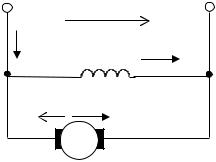
Электрическая принципиальная схема двигателя постоянного тока с параллельным возбуждением изображена на рис. 9.3. Напряжение
+ |
U |
|
– |
U приложено одновременно |
к об- |
I |
|
Iв |
|
мотке якоря и обмотке возбуждения. |
|
Rв |
|
U=Uя. |
(9.7) |
||
|
|
|
|
Параллельная обмотка возбуж- |
|
|
Е Iя |
|
|
дения выполняется тонким прово- |
|
|
|
|
|
дом со значительным числом вит- |
|
|
Rя |
|
|
ков. |
|
|
|
|
При поданном на обмотки якоря |
||
Рис. 9.3. Схема электриче- |
|
и возбуждения напряжении U по |
|||
ская принципиальная |
|
этим обмоткам протекают токи Iя и |
|||
двигателя постоянного тока |
|
Iв соответственно. |
|
||
|
с параллельным |
|
Согласно первому закону Кирх- |
||
|
возбуждением |
|
гофа |
|
|
|
|
|
|
196 |
|
n |
|
|
|
|
|
|
Се |
|
= 0,105 . |
(9.15) |
||||
n0 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
См |
||||||||
nн |
|
|
|
|
|
|
|
|
уравнения |
|||||
|
|
|
После подстановки из |
|||||||||||
|
|
(9.15) в (9.14) имеем |
|
|
||||||||||
|
|
|
|
n = |
|
U |
|
0,105 М R |
я |
, (9.16) |
||||
|
М |
|
|
|
− |
|
|
|||||||
0 |
|
|
СеФ |
|
( СеФ)2 |
|
||||||||
Мн |
где |
n0 = |
U |
|
– частота вращения иде- |
|||||||||
|
|
|||||||||||||
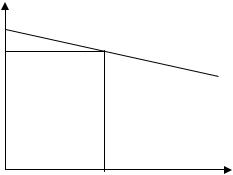
Рис. 9.5. График механической |
СеФ |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
характеристики двигателя |
ального |
|
|
|
холостого |
|
хода; |
|||||||
|
|
|
|
|
|
|||||||||
∆n = 0,105 М Rя – уменьшение частоты вращения при увеличении на-
( СеФ)2
грузочного момента.
Механическая характеристика двигателя постоянного тока с параллельным возбуждением строится по двум точкам:
1) n=n0, М=0; 2) n=nн, М=Мн.
Для расчета номинального момента обычно пользуются уравнением
Мн = 9550 |
Р2н |
, |
(9.17) |
|
|||
|
nн |
|
|
где Р2н – номинальная мощность на валу двигателя, кВт.
В момент пуска двигателя (когда n=0) согласно уравнению (9.2)
Е=0, следовательно, в соответствии с уравнением (9.10) |
|
|||||
|
|
|
|
I яп = U . |
(9.18) |
|
+ |
|
U |
– |
Ток Iяп |
Rя |
|
I |
|
Iв |
|
достигает больших |
||
Rв |
|
значений, так как сопротивление |
||||
|
|
|||||
|
|
|
|
якоря Rя очень мало (доли Ома). |
||
|
Е |
Iя |
|
Для ограничения Iяп в цепь |
||
|
|
|
|
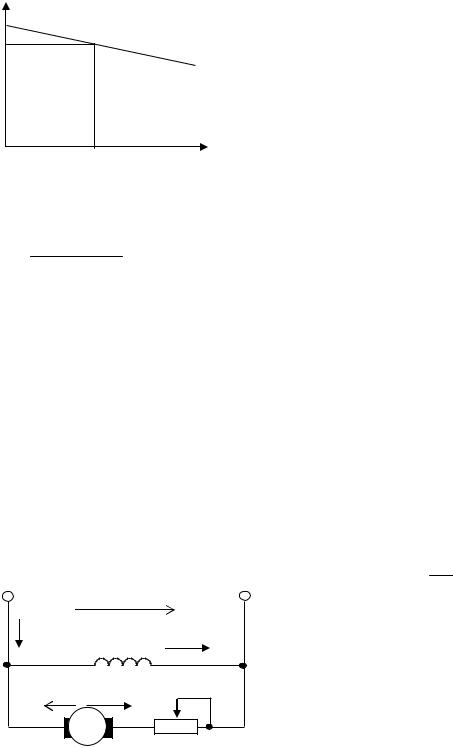
якоря на время пуска вводят пус- |
||
|
Rя |
Rд |
|
ковое сопротивление Rд (рис. 9.6), |
||
|
|
которое по мере разгона двигате- |
||||
Рис. 9.6. Схема электрическая |
|
ля выводят из цепи якоря. |
|
|||
принципиальная двигателя |
|
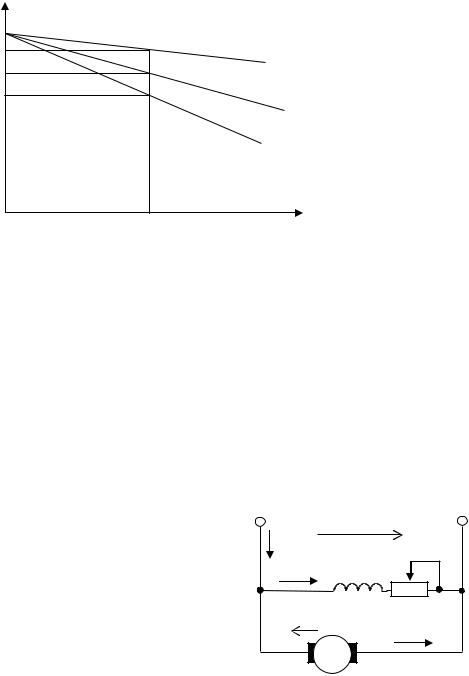
При введении в цепь якоря |
||||
|
постоянного тока |
|
добавочных |
сопротивлений |
уве- |
|
с параллельным возбуждением |
|
личивается |
наклон механических |
|||
с добавочным сопротивлением |
|
характеристик (рис. 9.7). |
|
|||
|
в цепи якоря |
|
|
|||
|
|
|
|
|
||
|
|
|
|
198 |
|
|