Материал: 2416
ливается. Достоинством динамического торможения является простота его осуществления.
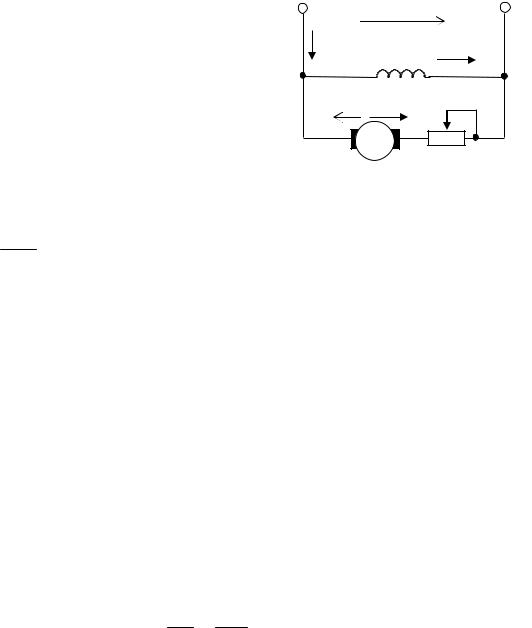
Торможение противовключением возникает после смены полярности напряжения, приложенного к обмотке якоря (рис. 9.25).
+ |
|
U |
– |
Механическая характеристика дви- |
|
|
гателя для этого случая приведена на |
||||
I |
Rв |
|
Iв |
рис. 9.26. При работе машины в двига- |
|
|
|
тельном режиме замкнуты контакты ЛК |
|||
|
|
|
|||
|
|
|
|
и разомкнуты контакты КТ (см. рис. |
|
КТ |
|
|
ЛК |
9.25). Электромагнитный момент явля- |
|
|
|
|
ется вращающим. При размыкании кон- |
||
|
|
|
|
тактов ЛК и замыкании контактов КТ |
|
|
Iя |
Iят |
Rдт |
ток якоря меняет направление, за счет |
|
|
чего электромагнитный момент стано- |
||||
|
|
|
|
||
|
Е |
Rя |
|
вится тормозным. |
|
ЛК |
|
|
КТ |
После торможения двигатель оста- |
|
|
|
навливается (n=0 в точке N на рис. |
|||
|
|
|
|
||
Рис. 9.25. Схема включения |
9.26). Если в этот момент времени дви- |
||||
гатель не будет отключен от сети, то |
|||||
двигателя при торможении |
|||||
электромагнитный момент вновь стано- |
|||||
противовключением |
|||||
вится вращающим и двигатель начинает |
|||||
|
|
|
|
||
разгоняться в обратном направлении.
Режим торможения противовключением (режим электромагнитного тормоза) может возникнуть также при работе двигателя, если к валу двигателя приложить достаточно большой тормозной момент, при котором двигатель начинает вращаться в обратную сторону.
|
|
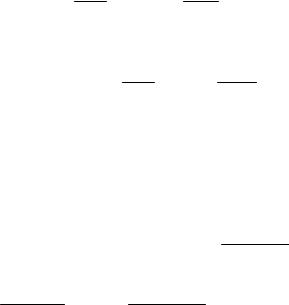
n |
|
|
|
|
n0 |
|
|
|
|
nн |
|
Rя |
|
Тормозной |
|
||
|
|
Двигательный режим |
||
|
режим |
|
||
|
|
|
|
|
|
|
|
Rя+Rдт |
М |
-М |
|
|||
|
N |
0 |
Мн |
|
Двигательный режим после реверса
-n0
Рис. 9.26. Механическая характеристика двигателя при торможении противовключением
210
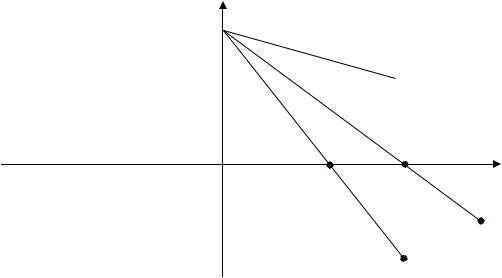
Торможение противовключением возникает при работе двигателя, например, в грузоподъемных механизмах при спуске тяжелых грузов. В этом случае двигатель включается на подъем, электромагнитный момент становится тормозным (рис. 9.27), а вращение осуществляется за счет сторонних сил (под действием силы тяжести груза).
n |
|
n0 |
Двигательный |
|
режим |
|
Rд1 |
Rд3 Rд2
а а' M
Режим b' электромагнитного b
тормоза
Рис. 9.27. Механические характеристики двигателя в режиме торможения противовключением
при разных сопротивлениях в цепи якоря: Rд3> Rд2> Rд1
При этом ЭДС, наводимая в якоре, меняет свое направление по отношению к двигательному режиму, а ток якоря равен
I я = |
U + E |
, |
(9.34) |
|
|||
|
Rя + Rдт |
|
|
где Rдт – дополнительное сопротивление, которое необходимо включить в цепь якоря, чтобы ограничить ток.
9.11.Коэффициент полезного действия двигателя
ипотери мощности
Коэффициент полезного действия двигателя определяется по формуле
η = |
Р2 |
100% , |
(9.35) |
|
Р |
||||
|
|
|
||
|
1 |
|
|
211
где Р1 – мощность, подводимая к двигателю из сети; Р2 – полезная мощность на валу двигателя.
Р1 = Р2 + ∑∆Р, |
(9.36) |
где ∑∆Р – суммарные потери мощности.
Потери мощности можно разделить на постоянные и переменные. Постоянные потери мощности – это такие потери, величина которых не зависит от нагрузки на валу двигателя. К постоянным поте-
рям относятся:
–механические потери;
–потери в стали;
–добавочные потери.
К механическим потерям ∆Рмех относятся потери, обусловлен-
ные трением в подшипниках, трением щеток по коллектору; трением якоря в воздухе и вентиляционным действием при вращении якоря и вентилятора двигателя, если он имеется.
∆Рмех = ( 2 − 4 )% Р1 . |
(9.37) |
Потери в стали (электромагнитные потери) ∆Рст обусловлены
перемагничиванием материала сердечника (железа) якоря и вихревыми токами. Потери при перемагничивании материала сердечника пропорциональны площади петли гистерезиса, частоте перемагничивания (частоте вращения якоря) и максимальной величине индукции. Потери на вихревые токи пропорциональны частоте перемагничивания и квадрату магнитной индукции.
∆Рст = (1 − 2 )% Р1. |
(9.38) |
К добавочным потерям ∆Рдоб относятся потери в полюсных на-
конечниках, обусловленные пульсациями магнитного поля из-за наличия зубцов якоря, и другие трудноопределимые потери.
∆Рдоб ≈1% Р1. |
(9.39) |
Переменные потери мощности – это потери, величина которых зависит от тока в обмотках якоря и возбуждения. К таким потерям от-
носятся электрические потери ∆Рэ . |
|
|
|
|
|
|
∆Рэ = ∆Ря |
+ ∆Рв, |
|
|
(9.40) |
||
где ∆Ря – потери мощности в обмотке якоря; ∆Рв |
– потери мощно- |
|||||
сти в обмотке возбуждения. |
|
|
|
|
|
|
∆Ря = I я2 Rя ; |
|
|
(9.41) |
|||
∆Р |
= I 2 R |
= I |
U |
в |
. |
(9.42) |
в |
в в |
в |
|
|
|
|
Обычно
212
Iян=Iн–Iв=20,5–0,85=19,65 А.
2. Потери в обмотке якоря и в цепи возбуждения
∆Рян = Rя I я2н = 0,75 19,652 = 290 Вт;
∆Рв = Rв Iв2 = 258 0,852 =186 Вт. 3. Магнитные и механические потери
∆Рм+∆Рмех=Р0–∆Ря0–∆Рв,
где Р0 – потребляемая двигателем мощность в режиме холостого хода; ∆Ря0 – потери в обмотке якоря в режиме холостого хода.
Р0=Uн·I0=220·2,35=517 Вт;
∆Ря0=Rя(I0–Iв)2=0,75(2,35–0,85)2=1,7 Вт; ∆Рмех+∆Рм=Р0–∆Ря0–∆Рв=517–1,7–186=329,3 Вт; ∑∆Р=290+186+329,3=805,3 Вт;
Р2н = Р1н −∑∆Р=4510–805,3=3704,7 Вт=3,71 кВт.
4. Номинальный КПД
ηн = Р2н 100% = 3,71 100% = 82,2% . Р1н 4,50
5. Номинальный вращающий момент
Мн = 9550 Р2н = 9550 3,71 = 34,6 Н·м. nн 1025
6. Пусковой ток якоря двигателя при пуске без реостата
I яп = |
U н |
= |
220 |
= 293 А. |
|
0,75 |
|||
|
Rя |
|
||
7. Сопротивление пускового реостата Rр определим из уравнения
I яп = 2,5 I ян = RяU+нRр ,
откуда Rр = 2,5U нI ян − Rя = 2,522019,65 −0,75 = 3,73 Ом.
8. Определим пусковой момент двигателя при пуске с реостатом. Известно, что вращающий момент двигателя М=СмФIя.
Для режима номинальной нагрузки Мн=СмФIян; для режима пуска Мп=СмФIяп.
Считая магнитный поток постоянным, имеем |
Мн |
= |
I ян |
, |
|
||||
|
Мп |
|
I яп |
|
214