Материал: 2416
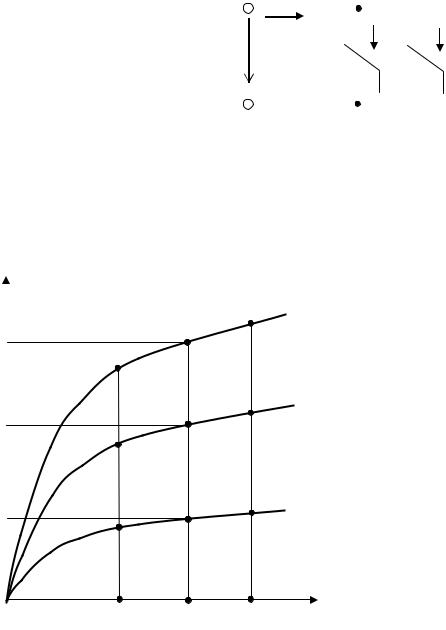
произвольными токами I ′ и I ′′ и произведем для них сложение характеристик по напряжению, т.е. используем свойство последовательного соединения элементов. При этом общее напряжение U0 равно сумме напряжений на участках цепи.
I |
|
|
I=f1(U) |
I=f2(U) |
I=f (U) |
|
|
А0′′ |
|
||||
I ′′ |
|
А1′′ |
А2′′ |
|
А′′ |
|
|
|
|
|
|
|
|
I0 |
А0 |
А1 |
А2 |
|
|
А |
|
|
|
|
|
|
|
|
А′ |
А1′ |
А′ |
А |
′ |
|
I ′ 0 |
|
2 |
|
|
||
U
U1
U2
U0
Рис. 4.4. Построение вольт-амперной характеристики для схемы
с последовательным соединением нелинейных элементов
Так, например, точку А′ вольт-амперной характеристики всей цепи получаем в результате сложения абсцисс А0′А1′ и А0′А2′ . Точно
так же получаем точку А′′ и остальные подобные точки. Соединив точки А′, А′′ и остальные подобные точки плавной кривой, получаем вольт-амперную характеристику всей цепи I=f(U). Теперь отложим на оси абсцисс отрезок, соответствующий в масштабе напряжению U0. Перпендикуляр, проведенный из точки, соответствующей этому напряжению, до пересечения с вольт-амперной характеристикой всей цепи, определяет величину тока цепи I0. Отрезки прямых А0 А1 и
А0 А2 , проведенных через точки А параллельно оси абсцисс (см. рис.
4.4), определяют напряжения U1 и U2 на соответствующих нелинейных элементах НЭ1 и НЭ2.
100
4.3. Параллельное соединение нелинейных элементов
При параллельном |
соединении |
|
|
|
|
|
|
|
|
|
|
I0 |
|
|
|
|
|
|
|
||
нелинейных элементов |
НЭ1 и НЭ2 |
|
|
|
|
I1 |
|
|
I2 |
|
(рис. 4.5) по заданным их вольт- |
U0 |
|
|
|
|
|||||
|
|
|
|
|
|
|
||||
амперным характеристикам (рис. 4.6) |
|
|
|
|
|
|
|
|
||
|
|
НЭ1 |
|
НЭ2 |
|
|
||||
и напряжению U0 необходимо опре- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
делить общий ток I0 и токи I1 и I2. При |
Рис. 4.5. Параллельное |
|
||||||||
параллельном соединении элементов |
соединение нелинейных |
|
||||||||
к каждому из них приложено одно и |
|
|
элементов |
|
||||||
то же напряжение U0 (см. рис. 4.5).
Выполним построение вольт-амперной характеристики всей цепи I=f(U) с учетом этого обстоятельства.
I |
|
|
|
|
А |
А′′ |
I=f (U) |
I0 |
|
|
|
|
|
|
|
А′ |
|
|
|
|
А |
А1′′ |
I=f1(U) |
I1 |
1 |
|
|
|
|
|
|
А1′ |
|
|
|
I2 |
А2 |
А2′′ |
I=f2(U) |
|
|
|
|
А2′ |
|
|
|
А0′ |
А0 |
А0′′ |
U |
U ′ |
U 0 |
U ′′ |
|
Рис.4.6. Построение вольт-амперной характеристики для схемы с параллельным соединением
нелинейных элементов
Задаемся произвольными напряжениями U ′ и U ′′ и, используя первый закон Кирхгофа, сложим ординаты вольт-амперных характеристик НЭ1 и НЭ2, т.е. выполним сложение по току (см. рис. 4.6). По полученной вольт-амперной характеристике всей цепи определим токи I0, I1 и I2.
101
Рассмотренные методы расчета широко используются при анализе цепей, содержащих электронные и полупроводниковые приборы.
4.4. Статическое и динамическое сопротивления нелинейного элемента
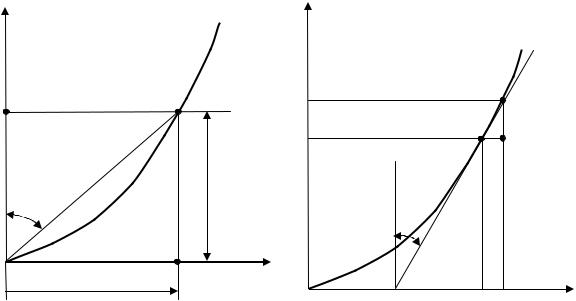
У нелинейных элементов различают статическое и дифференциальное (динамическое) сопротивления. Статическим сопротивлением в данной точке а вольт-амперной характеристики (рис. 4.7,а) называется отношение напряжения к току в данной точке
|
|
|
R |
= |
U a |
= |
mU ac |
= m |
R |
tgβ |
1 |
, |
|
(4.1) |
|
|
|
|
|
|
|||||||||||
|
|
|
ст |
|
Ia mI ad |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
mU |
|
||||
где m |
и m |
I |
– масштабы напряжения и тока; m |
R |
|
= |
– масштаб со- |
||||||||
|
|
||||||||||||||
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
mI
противления.
I I
c |
a |
|
∆I |
|
b |
|
|
a |
|
||
|
|
|
e |
||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Iа |
|
|
|
β1 |
|
β2 |
|
|
|
d |
U |
|
|
|
0 |
|
|
|
||
|
|
|
U |
||
Uа |
|
|
|
||
|
|
0 |
|
||
|
|
|
∆U |
||
|
а |
|
|
||
|
|
б |
|
Рис. 4.7. Определение статического (а) и динамического (б) сопротивлений нелинейных элементов
Динамическое (дифференциальное) сопротивление в точке а определяется как производная от напряжения по току в этой точке (рис. 4.7,б)
R |
= |
dU |
≈ |
∆U |
= |
mU |
|
ae |
= m |
R |
tgβ |
2 |
, |
(4.2) |
|
|
|
|
|||||||||||
дин |
|
dI |
|
∆I mI be |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|||||||
где β2 – угол между касательной к вольт-амперной характеристике в точке а и осью тока.
102
Таким образом, динамическое сопротивление пропорционально тангенсу угла между касательной к вольт-амперной характеристике в точке а и осью тока.
4.5. Цепи с нелинейными двухполюсниками
Как рассматривалось выше, свойства нелинейного резистивного двухполюсника определяются его вольт-амперной характеристикой.
|
I |
Eэкв |
Rэкв |
U |
|
A |
П |
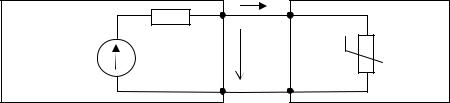
Рис. 4.8. Схема включения нелинейного пассивного двухполюсника П в линейную цепь, представленную линейным активным двухполюсником А
Рассмотрим общий случай включения нелинейного резистивного двухполюсника в произвольную линейную цепь, которую относительно этого двухполюсника представим линейным активным двухполюсником.
Заменим активный двухполюсник эквивалентным источником напряжения (рис. 4.8), уравнение внешней (нагрузочной) характеристики которого имеет вид
или |
|
U = Eэкв − I Rэкв |
(4.3) |
||
|
|
Еэкв −U |
|
|
|
|
|
I = |
. |
(4.4) |
|
|
|
||||
|
|
|
Rэкв |
|
|
Нагрузочная характеристика строится по двум точкам: 1) U=Eэкв, |
|||||
I=0; 2) U=0, I = |
Eэкв |
. |
|
|
|
|
|
|
|
||
|
Rэкв |
|
|
|
|
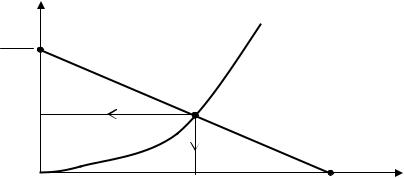
Точка пересечения А внешней характеристики активного двухполюсника и вольт-амперной характеристики нелинейного двухполюсника I=f(U) определяет рабочий режим цепи (рис. 4.9).
Внешняя характеристика двухполюсника называется нагрузочной характеристикой активного двухполюсника, а графоаналитический метод расчета нелинейной цепи с ее применением – методом нагрузочной характеристики.
103
Метод нагрузочной характеристики пригоден и в случаях, если нелинейная часть цепи содержит последовательное или параллельное соединение нелинейных двухполюсников с известными вольтамперными характеристиками.
|
I |
Еэкв |
I=f(U) |
R |
|
экв |
|
IA |
A |
|
U
UA |
Еэкв |
Рис. 4.9. К расчету нелинейной цепи методом нагрузочной характеристики
Для этого необходимо сложить вольт-амперные характеристики нелинейных двухполюсников, определить рабочую точку на результирующей характеристике методом нагрузочной характеристики.
4.6.Нелинейные цепи переменного тока
Вцепях постоянного и переменного токов широко применяют элементы с нелинейной вольт-амперной характеристикой I=f(U). При переменном токе можно использовать и нелинейные реактивные элементы. К таким устройствам относятся катушки и трансформаторы с ферромагнитным сердечником, имеющие нелинейную зависимость магнитного потока от тока Ф=f(I), конденсаторы, у которых заряд нелинейно связан с напряжением Q=f(U). С помощью нелинейных активных сопротивлений с несимметричной вольт-амперной характеристикой в цепях переменного тока можно осуществлять выпрямление напряжения и тока, так как в кривых напряжений и токов цепи появляются постоянные составляющие, которые можно выделить.
Совместное применение активных и реактивных нелинейных элементов, а также неоднородных источников питания значительно увеличивают число практических задач, успешно решаемых в различных отраслях техники (электронике, автоматике и т.д.).
Вкачестве примера рассмотрим полупроводниковый диод, включенный в цепь переменного тока. Вольт-амперная характеристика
104