Материал: 2385
По значениям элементов матрицы А вычисляют значения угловых элементов внешнего ориентирования снимка:
|
|
|
a23 |
|
|
|
||
arctg |
|
|
|
|
||||
|
|
|
|
|||||
|
|
|
a33 |
|
|
|
||
|
|
|
|
|
||||
arcsin a13 |
|
(5.8) |
||||||
. |
||||||||
|
|
|
a12 |
|
|
|
|
|
arctg |
|
|
|
|
|
|||
|
|
|||||||
|
|
|
a |
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Угловые элементы внешнего ориентирования снимков ω, α, χ можно определить и из решения обратных засечек по координатам точек сети определенным в системе координат объекта и координатам их изображений измеренных на снимке.
При этом уравнения поправок для обратной засечки имеют вид:
a a |
a |
l |
x |
|
x |
|
(5.9) |
|
1 |
2 |
3 |
|
|
. |
|||
b1 b2 b3 ly y |
|
|
||||||
Общее количество неизвестных, определяемых при построении и уравнивании сети можно определить по формуле:
N 7n,
где n – количество независимых моделей.
Общее количество уравнений поправок можно определить по формуле:
M 3m 3k 2i l S,
где
m – количество связующих точек на смежных моделях;
k - количество планово-высотных опорных точек, измеренных на моделях;
i - количество плановых опорных точек, измеренных на моделях;
l – количество высотных опорных точек, измеренных на моделях;
S – количество уравнений поправок, составленных для центров проекций, определенных с помощью системы GPS.( j = 6n, где n – количество независимых моделей).
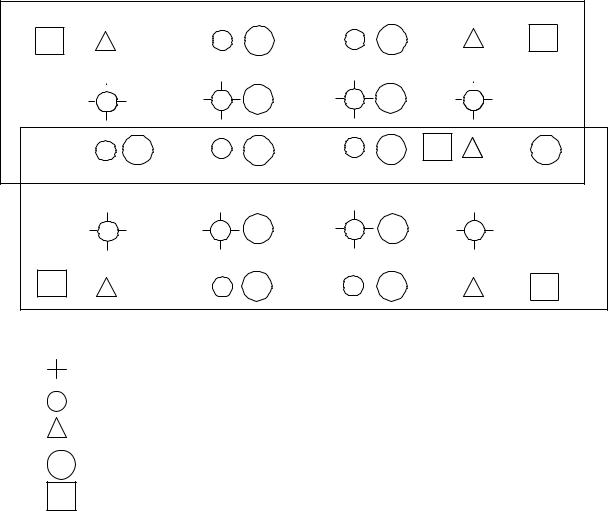
Для сети изображенной на рис. 5.1 состоящей из двух маршрутов, в каждом из которых 4 снимка (3 стереопары):
N 7 6 42 ,
M 2m 3k 3 18 3 6 54 24 78.
Если при этом координаты центров проекций были определены системой GPS, то дополнительно составляют j уравнений поправок:
j 6n 6 6 36.
Таким образом, M=114
72
1 |
1 |
1 |
|
1 |
|
1 |
1 |
|
|
1 |
4 |
4 |
2 |
1 |
|
1 |
1 |
|
|
1 |
1 |
1 |
|
1 |
|
Рис. 5.1 |
|
|
|
- главная точка снимка; - точка сети;
- планово-высотная точка;
-m - количество связующих точек на смежных моделях;
- количество планово-высотных опознаков, измеренных на моделях.
1
3. Построение и уравнивание маршрутной и блочной фототриангуляции по методу связок
При построении сети фототриангуляции методом связок для каждого изображения точки (определяемой и опорной), измеренного на снимке составляются уравнения коллинеарности:
|
|
|
|
x |
* |
|
|
|
|
|
|
x0 |
f |
|
|
|
x 0 |
|
|
||||
|
z |
* |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
, |
(5.10) |
|
|
|
|
|
y* |
|
|
|
||||
y0 |
f |
y 0 |
|
|
|
||||||
z |
* |
|
|
|
|
||||||
в которых: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x* |
|
|
X X |
|
|
|
|
||||
|
|
|
|
|
|
S |
|
|
|
||
y* AT |
Y YS ; |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||
|
* |
|
|
|
|
|
|||||
z |
|
|
|
|
Z ZS |
|
|
|
|||
x,y – координаты изображения точки местности, измеренной на снимке; X,Y,Z – координаты точки местности в системе координат объекта OXYZ;
XS,YS, ZS – координаты центров проекции снимка в системе координат объекта;
А – матрица преобразования координат, элементы a ij которой являются функциями угловых элементов внешнего ориентирования снимка.
Уравнения поправок, соответствующие условным уравнениям (5.10) имеют вид:
a |
X |
S |
a |
Y a |
Z |
S |
a |
a |
a |
a |
X a |
Y a |
Z l |
x |
|
|
(5.11) |
1 |
|
2 |
S 3 |
|
4 |
5 |
6 |
7 |
8 |
9 |
|
|
x . |
||||
b1 XS b2 YS b3 ZS b |
|
|
|
|
|
|
|
|
|
73 |
|||||||
4 b5 b6 b7 X b8 Y b9 Z ly y |
|
||||||||||||||||
Для каждой планово-высотной опорной точки составляются уравнения поправок:
X lX |
X |
|
|
|
Y lY |
|
|
, |
(5.12) |
Y |
||||
Z lZ |
Z |
|
|
|
|
|
|
||
в которых: |
|
|
|
|
l |
o |
||||
l |
|
o |
, |
||
|
|
|
|
|
|
lz |
|
o |
|
|
|
|
|
||||
X,Y,Z – измеренные координаты опорной точки,
Xo,Yo,Zo – приближенные значения координат опорной точки.
Для плановой опорной точки составляются два первых уравнения из системы уравнений (5.12), а для высотной опорной точки третье уравнение.
Если с помощью системы GPS были определены координаты центров проекций снимков S, то для каждого центра проекции составляются уравнения поправок:
XS |
lXs Xs |
|
|
||
YS |
lYs |
Ys |
|
, |
(5.13) |
|
|||||
ZS |
lZs |
Zs |
|
|
|
|
|
|
|||
в которых: |
|
|
|
|
|
l s So S |
|
|
|
||
l s So |
|
|
|
|
|
S , |
|
|
|
||
l s |
o |
|
|
|
|
S |
S |
|
|
|
|
Xs,Ys,Zs – измеренные координаты центров проекции снимков, XoS, YoS, ZoS – их приближенные значения.
В случае, если при съемке с помощью навигационного комплекса, включающего инерциальную и GPS системы, были определены угловые элементы внешнего ориентирования снимков , , ,для каждого снимка составляются уравнения поправок:
|
|
o |
|
|||||
|
|
|
в которых: |
|
o |
|
||
, (5.14), |
|
, |
||||||
|
|
|
|
|
|
|
o |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|||
, , - измеренные значения угловых ЭВО,
o, o, o - их приближенные значения.
Полученную таким образом систему уравнений поправок решают методом приближений по методу наименьших квадратов под условием VTPV=min. В результате решения находят значения элементов ориентирования снимков сети и координаты точек сети в системе координат объекта.
В первом приближении в уравнениях поправок (5.12), (5.13) и (5.14) приближенные значения неизвестных принимаются равными их измеренным значениям.
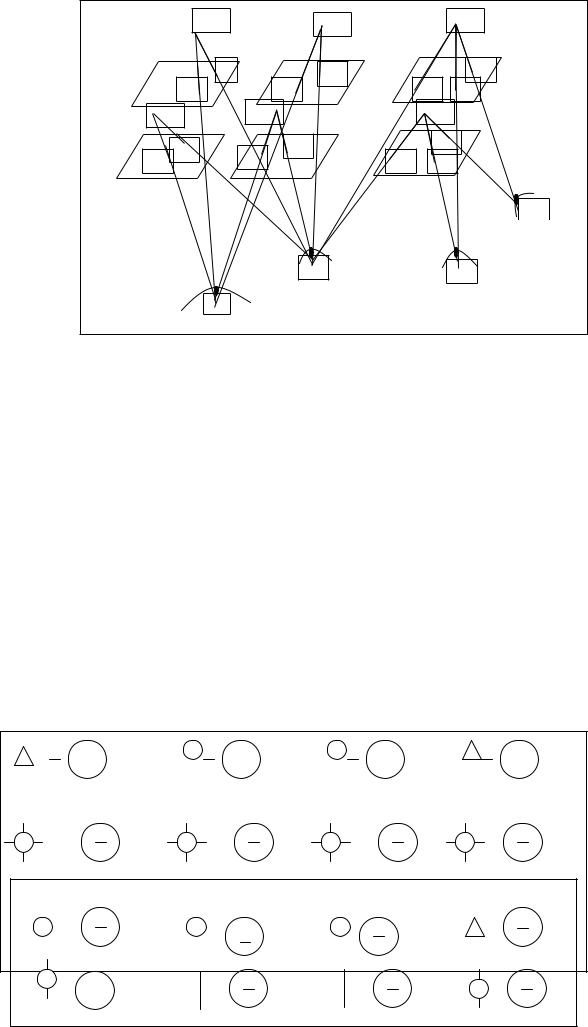
С геометрической точки зрения сеть фототриангуляции по методу связок строится под условием пересечения соответственных проектирующих лучей связок в точках объекта (Рис. 5.2):
74
|
S1 |
S2 |
|
|
S3 |
|
m1 |
m2 |
|
|
l3 |
|
n1 |
n2 |
|
m3 |
k3 |
|
|
S5 |
|
S6 |
|
|
m4 |
m5 |
m6 |
k6 |
l6 |
|
n4 |
n5 |
|
||
|
|
|
|
|
L |
|
|
M |
|
|
Рис. 5.2 |
|
|
|
|
K |
|
Общее |
N |
|
|
|
|
количество |
|
|
|
|
|
неизвестных, |
|
|
|
|
|
определяемых при построении и уравнивании блочной сети, можно определить по формуле: |
|||||
|
|
N 6n 3k, |
|
|
(5.15) |
где n – количество снимков в сети; |
|
|
|
||
|
k – количество определяемых точек (включая опорные геодезические точки). |
||||
|
Общее количество уравнений поправок можно определить по формуле: |
||||
M 2m 3c 2i l 3S 3j , |
(5.16) |
в которой:
m – общее количество измеренных на снимках точек;
c - количество планово-высотных опорных точек;
i - количество плановых опорных точек;
l – количество высотных опорных точек;
S – количество центров проекций снимков, координаты которых были определены с помощью системы GPS;
Ј – количество снимков, угловые элементы которых были определены.
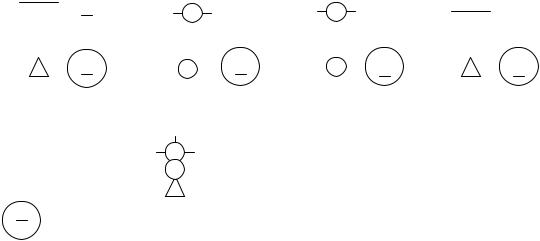
Рассчитаем величины M и N для блочной сети изображенной на рис. 5.3, построенной по двум маршрутам, в каждом из которых 4 снимка, с использованием в качестве опорной информации координаты опорных точек и центров проекции снимков.
2 |
4 |
4 |
2 |
2 |
3 |
3 |
2 |
2 |
4 |
4 |
2 |
2 |
3 |
3 |
2 |
4 |
8 |
8 |
4 |
|
4 |
4 |
|||
6 |
||||
|
6 |
|
||
|
|
|
||
|
4 |
4 |
75 |
|
|
2 |
|||
|
3 |
3 |
2 |
2
2
2 |
4 |
4 |
2 |
2 |
3 |
3 |
2 |
Рис. 5.3
-- главная точка снимка;
|
|
- точка сети; |
|
- |
- планово-высотная точка; |
|
количество точек, измеренных на снимках ( в числителе – количество точек, |
|
2 |
- |
2измеренных на стереокомпараторе или аналитической стереофотограмметрической системе, а в знаменателе – количество точек, измеренных на цифровой фотограмметрической системе).
Для блочной сети, изображенной на рис. 5.3, n=8, а k=20, поэтому N 6 8 3 20 108.
Из рис. 5.3 следует, что m=72, если снимки измерялись на стереокомпараторе или аналитическом стереофотограмметрическом приборе, и m=60, если снимки измерялись на цифровой
фотограмметрической системе, c 5, |
а S 8. Следовательно, |
|||
M 2 72 |
3 5 |
3 |
8 183, |
если снимки измерялись на стереокомпараторе или |
аналитической стереофотограмметрической системе, и |
||||
M 2 60 |
3 5 |
3 |
8 159, |
если снимки измерялись на цифровой фотограмметрической |
системе. |
|
|
|
|
4. Построение и уравнивание маршрутной и блочной сети
фототриангуляции по методу связок с самокалибровкой
При построении и уравнивании сетей маршрутной и блочной фототриангуляции в измеренные на снимках значения координат точек вводятся поправки, позволяющие исключить систематические ошибки снимков, вызываемые дисторсией объектива съемочной камеры, деформацией фотопленки, атмосферной рефракцией.
Однако снимки, тем не менее, имеют остаточные систематические искажения, которые вызваны изменением в полете параметров (элементов внутреннего ориентирования и дисторсии объектива съемочной камеры), из за отличия температуры и давления от их значений, полученных при проведении калибровки съемочной камеры, а также отличием параметров слоя атмосферы от параметров стандартной атмосферы, влиянием на положение точек на снимке оптического люка и другими причинами.
Систематические искажения снимков можно исключить или в значительной мере ослабить их влияние и, как следствие, повысить точность построения сети фототриангуляции, при ее построении и уравнивании по методу связок с самокалибровкой.
В этом методе построения и уравнивания сети фототриангуляции в отличие от метода изложенного в разделе 3 для каждой точки, измеренной на снимке, составляются уравнения:
|
|
|
x |
* |
|
|
|
|
|
|
|
|
x0 |
f |
|
|
x x |
0 |
|
|
|||||
z |
* |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
, |
(5.17) |
|
|
|
|
y* |
|
|
|
|
|
|
|||
y0 |
f |
|
y y |
0 |
|
|
|
|||||
z |
* |
|
|
|
|
|||||||
в которых: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x* |
|
|
|
|
X X |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
S |
|
|
|
|
y* AT |
Y YS , |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
* |
|
|
|
|
|
|
|
|
||
z |
|
|
|
|
|
Z ZS |
|
|
|
|
||
а x и y - полиномы, описывающие систематические искажения снимков.
Полиномы, описывающие систематические искажения снимков, могут иметь различный вид. В качестве примера приведем один из таких полиномов:
x x k1r2 |
k2r4 |
k3r6 p1 y2 3x2 2p2 x y |
|
||||||||
|
y |
y k r2 |
k |
2 |
r4 |
k |
r6 2p xy p |
2 |
x2 3y |
2 , |
(5.18) |
|
1 |
|
|
3 |
1 |
|
|
|
|||
76