Материал: 2308
3.Прогибы поверхности полупространства от действия первой нагрузки суммируются с прогибами от второй нагрузки. Это приводит к увеличению прогибов в период между первым ивторым нагружениями.
4.Кривые горизонтальных перемещений имеют ту же форму, что и кривые на рис. 3.2, однако их ординаты приблизительно в 3 раза меньше и направлены горизонтально.
Рис. 3.2. Кривые вертикальных упругих деформаций поверхности упругого полупространства при движении двухосного грузового u3a2 и легкового u3a1
автомобилей со скоростью 40 км/ч. Кривые 1, 2, 3 – для модулей упругости в 100, 300 и 500 МПа. Горизонтальные перемещения равны соответственно
0,3· u3а1 и 0,3· u3а2
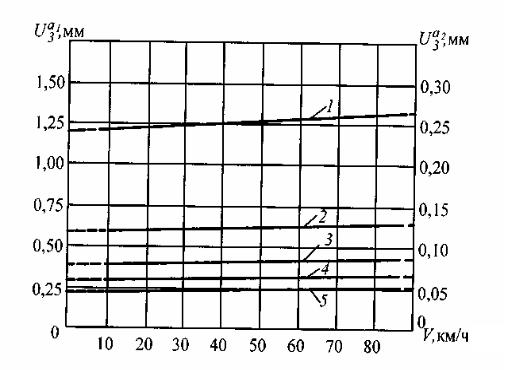
Влияние скорости движения нагрузки на поверхность полупространства показано на рис. 3.3. Отсюда следует, что повышение скорости до 80 км/ч незначительно увеличивает прогиб (до 10 %). Вместе с тем модуль упругости полупространства является решающим фактором при его деформировании. В концентрированном виде результаты расчетов прогибов полупространства с учетом всех факторов приведены на номограмме рис. 3.4.
Номограмма позволяет определить прогиб поверхности полупространства в зависимости от модуля упругости полупространства Е скоро-
сти движения нагрузки V, радиуса площадки а, удельного давления на поверхность Р3, а также на расстояниях r/a = 2,4 и 10.
Рис. 3. 3. Зависимость максимальных упругих прогибов поверхности полупространства при действии грузового u3а1 и легкового u3а2
автомобилей от скорости их движения. Кривые 1, 2, 3, 4 и 5 – соответственно для модулей упругости 100, 200, 300, 400, 500 МПа
Ключ к номограмме показан на рис. 3.4 стрелками через точки I, II, III, IV, V, VI и VII. Несмотря на результаты, близкие к практике измерений, рассматриваемая теория имеет недостатки, среди которых важнейшие – неучет изменения модуля упругости полупространства с ростом скорости движения нагрузки и пульсирующего характера возрастающих автомобильных нагрузок.
Горизонтальные перемещения полупространства под действием движущейся горизонтальной нагрузки, распределенной в пределах круга по схеме рис. 3.1, б, определяются после преобразований исходных уравнений по выражению
u1 X |
|
|
|
|
P a |
|
|
|
|
|
1 |
|
3 I1,0 |
|
|
|
|
|
|
|||||||
1 |
|
|
1 |
|
К |
3 |
I1,0 |
|
|
K |
I1,2 |
|
|
|||||||||||||
|
|
|
|
2 |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
K |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||
2 |
|
|
|
|
I |
1,4 |
4I |
1,2 |
3I |
1,0 |
|
|
I |
1,0 |
I |
|
|
. |
(3.19) |
|||||||
|
|
|
|
|
|
|
||||||||||||||||||||
T |
8 |
|
|
|
|
|
|
16 |
|
|
1,4 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
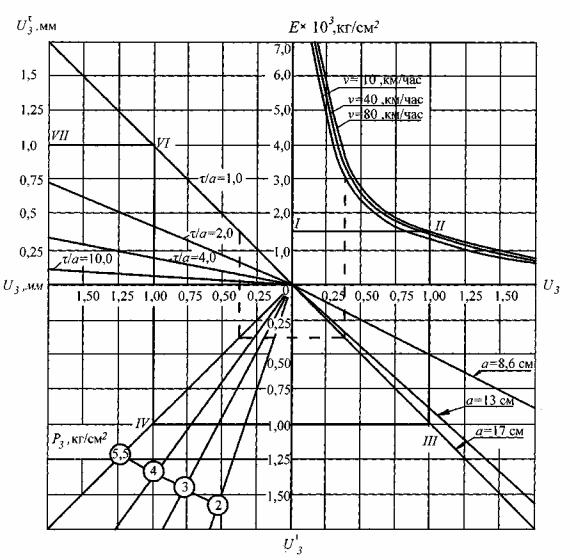
Рис. 3.4. Номограмма для определения упругого прогиба полупространства в центре U3 при нагрузке, движущейся со скоростью V, и на расстоянии r от колеса u3 (а – радиус площадки загружения; РЗ – удельная нагрузка). Для учета динамичности нагрузок умножать u3 и u3 на коэффициенты динамичности
Обозначения даны в формулах (3.10) и табл. 3.2. Результаты расчетов горизонтальных перемещений полупространства под действием реальных сил торможения, равных Р1 = 0,7·Р3 (где 0,7 – коэффициент сцепления), позволяют считать:
а) горизонтальные перемещения полупространства от действия вертикальных сил соизмеримы с вертикальными и имеют существенное значение даже на расстоянии 10 r/а;
б) скорость движения тангенсальной нагрузки почти не влияет на значения перемещений, что, однако, противоречит опытам и является следствием неучета изменения упругости полупространства с увеличением скорости движения нагрузок.
Таким образом, рассмотренная теория применима лишь при уверенности, что сплошное упругое полупространство достаточно эквивалентно реальной слоистой конструкции, а модули упругости последней не увеличиваются существенно с повышением скорости движения нагрузок. В других случаях необходимо принимать в расчет прогибы, соответствующие ожидаемому значению модуля упругости при расчетных скоростях движения нагрузок. Более совершенную модель дорожной конструкции предложили С.К. Иллиополов и М.Г. Селезнев в 1997 г. в РГСУ (г. Ростов). Модель дорожной конструкции представляет собой пакет полос конечной толщины и ширины, жестко сцепленных между собой и с подстилающей геологической средой. Геологическая среда описывается многослойным полупространством с плоскопараллельными границами раздела упругих параметров. Все элементы конструкции описываются трехмерными соотношениями динамической теории упругости, вязкоупругости или гетерогенной (пористой, флюидонасыщенной) среды.
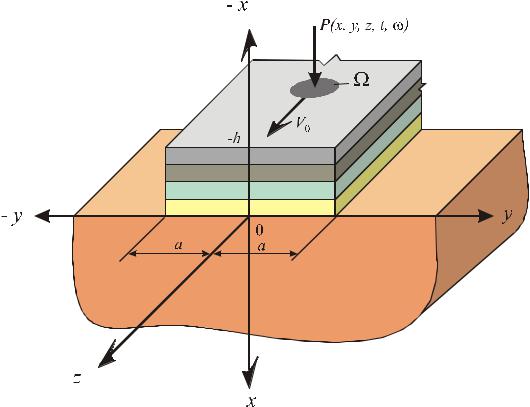
В общем случае модельная динамическая краевая задача механики сплошной среды, описывающая систему «дорожная конструкция – грунт» может быть сформу-
лирована следующим образом (рис. 3.5).
Рис. 3.5. Схема пространственной модели системы «дорожная конструкция – грунт»
Пусть вязкоупругая среда занимает в декартовой системе координат
(x, y, z) область x [h, 0]; y [– a, a]; x > 0 y (– ∞, + ∞). Во всех случаях область не ограничена по координате z. Упругие характеристики подобластей кусочно-непрерывны по координате х, т.е. структура состоит из плоскопараллельных изотропных слоев. Свойства сплошной среды в них определяются плотностью ρj, постоянными Ламе λj и μj, а также вязкостью в пределах каждого слоя, приводящей к заданию параметров λj, μj комплекснозначными величинами в пределах каждого слоя. Параметр j определяет номер слоя, начиная с верхнего (j =1).
Движение среды описывается динамическими уравнениями Ламе в пространственном случае:
|
|
|
|
|
|
|
|
u |
j |
|
|
|
|
|
|
j |
|
|
|
|
2uxj |
; |
|
|||||||||||||||
|
|
|
|
|
|
j |
x |
j |
j |
|
|
x |
j |
|
|
t2 |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
u |
j |
|
|
|
|
|
|
|
j |
|
|
|
|
2uyj |
|
; |
(3.20) |
|||||||||||||
|
|
|
|
|
|
j |
y |
j |
j |
|
y |
|
j |
|
t2 |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
j uz j |
j |
j |
|
j |
|
j |
|
2uz j |
, |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
z |
|
|
t2 |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
здесь uxj , uyj , uzj –компоненты вектора смещения точки j-го слоя U j x, y,z . |
||||||||||||||||||||||||||||||||||||||
Каждый |
из |
|
плоскопараллельных |
|
|
слоев |
занимает |
область |
||||||||||||||||||||||||||||||
x h |
|
, h |
|
,h |
|
h. |
2 |
|
|
|
2 |
|
|
|
2 |
|
|
|
– оператор Лапласа в декарто- |
|||||||||||||||||||
j |
j 1 |
0 |
x2 |
y2 |
z2 |
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
вой системе координат, |
j |
|
uxj |
|
|
uyj |
|
|
uzj |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
. |
На границах раздела |
||||||||||||||||||||||||||
|
x |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
z |
|
|
|
|
|||||||||
упругих параметров заданы условия жесткого сцепления – равенство компонент векторов перемещения и напряжения между контактирующими слоями. На поверхность x = – h в некоторой области Ω действует система нормальных усилий, зависящих от времени и движущихся равномерно и
прямолинейно со скоростью V0 |
вдоль оси oz: |
|
|
|
|
(z, y Ω), x = - h; |
σx = T1(z, y, t); τxy = T2 (z, y, t); τxz = T3 (z, y,t), |
(3.21) |
|||
здесь 1 x , xy , xz |
вектор |
напряжений на |
плоской |
границе |
области |
x = const; 2 y , xy , zy вектор напряжений |
на плоских |
границах области |
|||
y const . Область приложения нагрузки 2 y , xy , zy Ω движется по поверхности
x = – h со скоростью V0 в направлении оси oz.
Все остальные плоские участки границы области свободны от усилий. На бес-
конечности всюду задаем естественные условия излучения упругих волн, для кор-