Материал: 2192
6.Вычислить сумму работ активных сил на возможных перемещениях их точек приложения и приравнять эту сумму нулю.
7.Решив составленное уравнение, определить искомую величину.
10.2. Примеры выполнения расчетно-графической (контрольной) |
|
работы «Применение принципа возможных перемещений к решению |
|
С |
|
задач о равновесии сил, приложенных к механической системе с одной |
|
|
степенью свободы» |
|
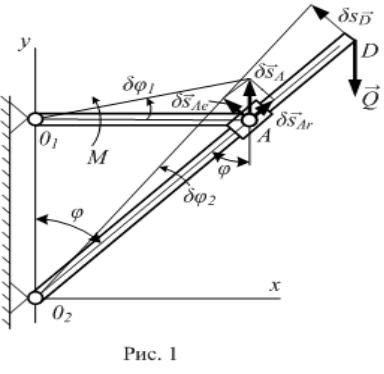
10.2.1. Кулисный механизм |
На кр вош п О1А кулисного механизма, расположенного в
плоскости, действует вращающий момент М (рис. 1). |
|
горизонтальной |
|
б |
|
А |
|
Д |
|
Применяя принцип возможных перемещений, определить какую силу |
|
Q следует приложить к кулисе в точке D, чтобы уравновесить механизм в |
|
момент, когда AO1O2 =90°; O1O2A = φ. Трением пренебречь. |
|
Дано: момент М; углы AO1O2 =90°; |
O1O2A = φ. |
Определить: Q |
И |
Решение.
Применим геометрический метод. Механизм имеет одну степень свободы, сообщим ему возможное перемещение.
Повернём кривошип О1А на угол δφ1, при этом ползун А получит относительное возможное перемещение S Ar вдоль кулисы и переносное
возможное перемещение S Ae вместе с кулисой.
126

Кулиса О2А повернётся на угол δφ2, а абсолютное возможное перемещение ползуна будет δsА.
Составим уравнение paбот
М δφ1+Q SD cos(90o ) =0.
Определим δφ1, используя чертеж, |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
С |
|
|
|
|
|
|
|
1 sA O1A . |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Для точки А ползуна, совершающего сложное движение, построим |
||||||||||||||||||||||||||||
и |
|
|
|
sA sAe sAr , |
|
|
|
|||||||||||||||||||||
векторный параллелограмм (рис. 1) |
определяющий |
|||||||||||||||||||||||||||
абсолютное возможное перемещение sA как векторную сумму |
||||||||||||||||||||||||||||
возможных перемещен й. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Используя угол φ, найдем sAe |
|
из векторного |
прямоугольного |
|||||||||||||||||||||||||
б2 |
|
|
|
|
|
|
|
|||||||||||||||||||||
треугольн ка : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sAe = sA sin . |
|
|
|
|
|
|
|
|||||
Зап шем 2 |
|
sAe |
|
|
sA sin |
. |
|
|
|
|
|
|
|
|
|
|||||||||||||
O2 A |
|
|
O2 A |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
||||||||||||||
Определим |
O A |
|
O1 A |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
s |
A |
sin2 |
|
и s |
|
|
|
O D |
s |
A |
sin2 O D |
. |
|
|||||||||||
2 |
|
|
|
|
|
|
|
|
D |
2 |
|
|
|
2 |
|
|||||||||||||
|
|
|
|
|
|
O1A |
|
|
|
|
|
|
|
2 |
|
|
|
O1A |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Подставляя δφ1 и sD в уравнение работ, получим |
|
|
|
|||||||||||||||||||||||||
|
|
s |
|
|
|
|
|
s |
|
sin3 |
O D |
|
|
|
|
|
|
|
|
M |
|
|
||||||
М |
|
|
|
A |
Q |
|
|
A |
|
|
|
|
2 |
Д0 , откуда Q |
. |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
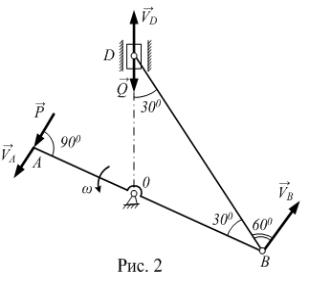
10.2.2.Четырехзвенный кривошипно-ползунныйИмеханизм
К плоскому механизму, изображенному на рис. 2, приложены силы Р и Q . Механизм находится в равновесии, трением пренебречь.O A O A O D sin
127
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дано: Р=450 Н; ОВ 5 ОА; |
OВD= ОDВ=30º. |
||||||||||||||
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
иОпредел ть: вел ч ну силы Q. |
|
|
|
|
|
|
|
|
|||||||
Решен е. Пр мен м |
кинематический метод решения задачи. |
||||||||||||||
Механ зм меет одну степень сво оды. Стержню |
|
сообщим возможную |
|||||||||||||
АВ |
|||||||||||||||
угловую скорость ω вращения вокруг точки О. |
|
|
|||||||||||||
Покажембвекторы скоростей точек , В и D. |
|
|
|||||||||||||
Составим уравнение возможных скоростей: |
|
|
|||||||||||||
|
|
|
PVA |
– QVD=0. |
|
|
|
|
|||||||
Соотношения скоростей точек |
Д |
||||||||||||||
|
и В стержня имеют вид |
||||||||||||||
VA |
OA |
, откуда |
|
|
|
|
VB |
5VA. |
|||||||
VB |
OB |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
Стержень ВD совершает плоскопараллельное движение. |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
||
На основании теоремы о проекциях скоростей |
|||||||||||||||
VBсos60 0 =VD соs30 0 ; |
VD |
VB |
cos 600 |
|
5VA tg 300 . |
||||||||||
|
|
|
|
|
|
|
|
|
|
cos300 |
4 |
||||
Уравнение возможных мощностей принимает вид |
|||||||||||||||
|
PVA Q |
5 |
VA tg 30 |
0 |
0 , |
|
|
||||||||
|
4 |
|
|
|
|
||||||||||
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4P |
|
|
|
|
|
|
|
|
|
||
|
Q |
|
|
|
|
623 |
|
|
H. |
|
|
||||
|
|
5 tg 300 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
128
10.3. Варианты расчетно-графической (контрольной) работы «Применение принципа возможных перемещений к решению задач о равновесии сил, приложенных к механической системе с одной степенью свободы»
хемы механизмов, находящихся под действием взаимно уравновешивающихся сил, и необходимые для расчёта данные приведены
в табл. 10.1. |
|
|
|
В расчётах |
спользовать следующие условные обозначения: с – |
||
коэфф ц ент жёсткости пружины (Н/см); h – деформация пружины (см); |
|||
Q, P – с лы (Н); М – момент пары сил (Н·м). |
|||
С |
|
|
|
Пр мечан я: |
|
|
|
Вар ант 6. Вес |
О1А не учитывать. |
||
Вар ант 7. Пруж на сжата. |
|
||
Вар ант 8. Пруж на сжата. |
|
||
рукоятки |
|
||
б1 2 |
|||
Вар ант 10. |
Вес рукоятки ОА не учитывать. |
||
Вариант 14. |
Вес стержней ОА и ОВ не учитывать; пружина растянута. |
||
Вариант 16. |
Вес стержней О |
и О В не учитывать. |
|
Вариант 18. |
Р – вес лока радиуса R3. |
||
Вариант 19. |
Вес звена |
не учитывать. |
|
Вариант 24. |
Пружина сжата. |
||
Вариант 25. |
АВ |
||
Вес стержней |
О и ВО не учитывать. Пружина растянута. |
||
Вариант 26. |
Пружина растянута. |
||
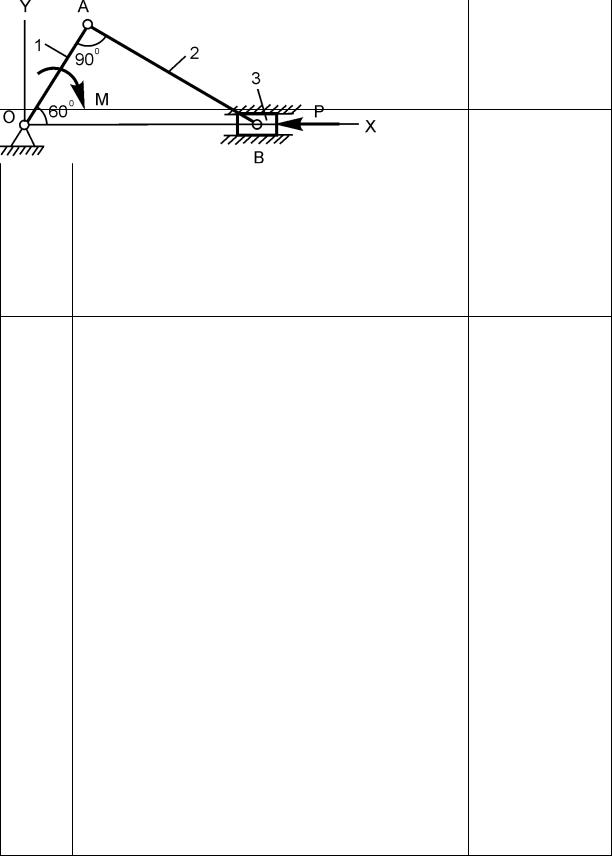
Применяя принцип возможныхДперемещений и пренебрегая силами |
|||
сопротивления, определить величину, указанную в последнем столбце |
|||
табл. 10.1. |
|
|
И |
|
|
|
|
129
|
|
Таблица 10.1 |
|
|
|
|
|
Номер |
|
Исходные |
|
|
данные, |
||
вариан |
|
||
Расчётная схема механизма |
определяемая |
||
та |
|||
|
величина |
||
|
|
||
1 |
2 |
3 |
|
и |
|
ОА = 10 см; |
|||
С1 |
|
|
||||
|
|
М = 20 Н·м; |
||||
|
б |
|
P = ? |
|||
|
|
|
|
|||
2 |
А |
О1А = 20 см; |
||||
|
|
Р = 100 Н; |
||||
|
|
|
Д |
|||
|
|
|
|
|
M = ? |
|
|
|
|
|
|
|
|
|
|
|
|
R2 = 40 см; |
||
|
|
|
|
r2 |
= 30 см; |
|
3 |
|
ИR3 = 20 см; |
||||
|
|
|
|
M = 100 Н·м; |
||
|
|
|
|
|
Q = ? |
|
130