Материал: 2192
|
|
Продолжение табл. 9.1 |
|
|
|
1 |
2 |
3 |
С |
|
m1 = 80 кг; |
||
22 |
|
|
m2 = 20 кг; |
|
|
|
R2 = 0,10 м; |
||
|
и |
|
||
|
|
М = 120 Н·м |
||
|
|
|
||
|
|
А |
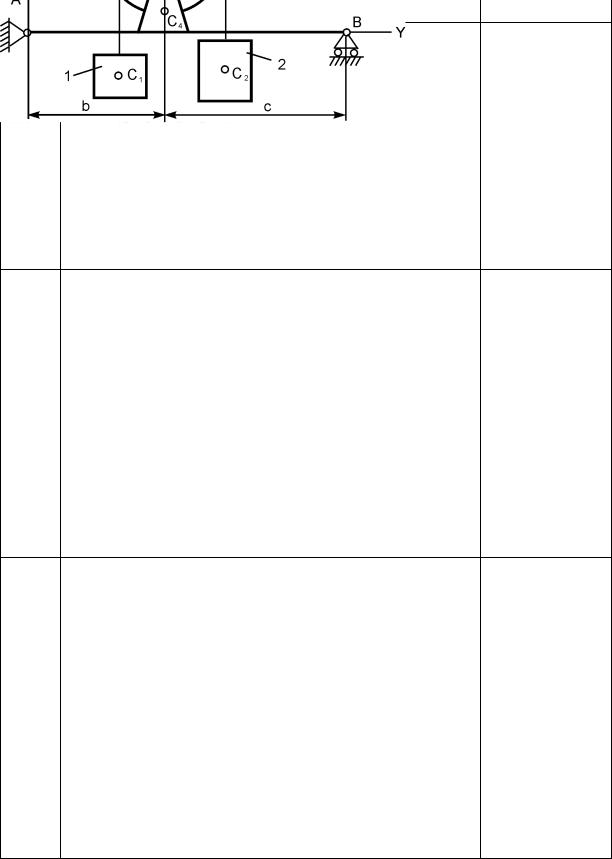
m1 = 10 кг; |
|
|
|
m2 = 25 кг; |
||
23 |
б b = 0,30 м; |
|||
|
|
|
|
с = 0,50 м; |
|
|
|
|
d = 0,35 м; |
|
|
|
|
= 10 рад/с |
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
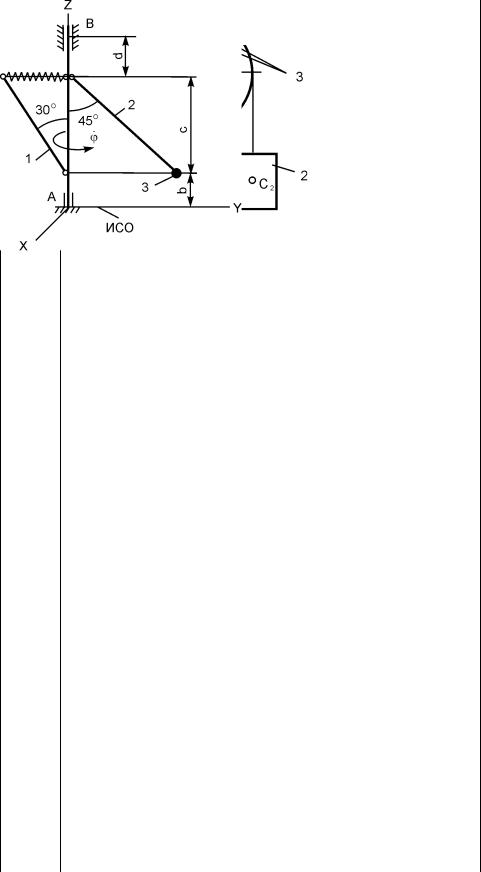
m1 = 10 кг; |
|
|
|
|
m2 = 25 кг; |
|
|
|
|
b = 0,20 м; |
24 |
|
Ис = 0,50 м; |
||
|
|
|
|
d = 0,30 м; |
|
|
|
|
= 12 рад/с |
|
|
|
|
|
121
|
|
Продолжение табл. 9.1 |
|
|
|
1 |
2 |
3 |
С |
|
m1 = 10 кг; |
||
|
|
|
|
m2 = 25 кг; |
25 |
|
|
m3 = 20 кг; |
|
|
|
R3 = 0,30 м; |
||
|
и |
|
||
|
|
r3 = 0,20 м |
||
|
|
m1 = 80 кг; |
||
|
|
А |
m2 = 20 кг; |
|
|
|
m3 = 20 кг; |
||
|
|
б |
|
m4 = 20 кг; |
26 |
|
R3 = 0,30 м; |
||
|
|
r3 = 0,20 м; |
||
|
|
|
|
|
|
|
|
|
b = 0,20 м; |
|
|
|
|
c = 0,30 м |
|
|
Д |
||
|
|
|
И |
|
|
|
|
|
m1 = 50 кг; |
|
|
|
|
m2 = 20 кг; |
|
|
|
|
m3 = 20 кг; |
27 |
|
|
R3 = 0,25 м; |
|
|
|
|
|
r3 = 0,15 м; |
|
|
|
|
b = 0,20 м |
122
|
|
|
|
|
|
Окончание табл. 9.1 |
|||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
3 |
|
|
С |
|
|
|
|
m1 = 30 кг; |
|
|||
|
|
|
|
m2 |
= 15 кг; |
|
|||
|
|
|
|
|
|
|
m3 = 15 кг; |
|
|
28 |
|
|
|
|
|
P = 300 H; |
|
||
|
|
|
|
|
R3 = 0,25 м; |
|
|||
|
и |
|
|
|
|
||||
|
|
|
|
r3 = 0,15 м |
|
||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
|
б |
|
|
|
|
|
||
|
|
|
А |
|
m1 |
= 10 кг; |
|
||
|
|
|
|
m2 |
= 25 кг; |
|
|||
|
|
|
|
|
|
|
m3 = 25 кг; |
|
|
29 |
|
|
|
|
|
b = 0,20 м; |
|
||
|
|
|
|
|
|
|
с = 0,15 м; |
|
|
|
|
|
|
|
|
|
d = 0,25 м; |
|
|
|
|
|
|
Д |
|
||||
|
|
|
|
|
|
|
= 8 рад/с |
|
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
И |
|
||||
|
|
|
|
|
|
|
m1 |
= 10 кг; |
|
|
|
|
|
|
|
|
m2 = 25 кг; |
|
|
|
|
|
|
|
|
|
m3 = 20 кг; |
|
|
|
|
|
|
|
|
|
m4 = 15 кг; |
|
|
|
|
|
|
|
|
|
b = 0,50 м; |
|
|
|
|
|
|
|
|
|
с = 0,35 м; |
|
|
|
|
|
|
|
|
|
d = 0,15 м |
|
|
|
|
|
|
|
|
|
= 16 рад/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
123
10. ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ. РАСЧЕТНО-ГРАФИЧЕСКАЯ (КОНТРОЛЬНАЯ) РАБОТА
ПРИМЕНЕНИЕ ПРИНЦИПА ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ К РЕШЕНИЮ ЗАДАЧ О РАВНОВЕСИИ СИЛ, ПРИЛОЖЕННЫХ К МЕХАНИЧЕСКОЙ СИСТЕМЕ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
10.1. Методические рекомендации к выполнению расчетнографической (контрольной) работы
Пр нц п возможных перемещений применяется при исследовании
равновес |
я твёрдых тел, систем твёрдых тел: для определения положений |
равновес |
я, для определения реакций связей, при определении |
С |
|
зависимостей между задаваемыми силами. |
|
Задачи на сследование равновесия твёрдых тел и систем твёрдых тел
рекомендуется выполнять в следующей последовательности:
б отбросив данную связьА, заменить её действие на механическую систему
1. |
Изобраз ть на |
сунке активные силы, приложенные к каждой из |
|
мат |
точек механической системы. |
|
|
ериальных |
добавить соответствующие |
||
2. |
При нал ч |
неидеальных связей |
|
реакции связей (с лы трения отнести к числу активных сил). |
|||
3. |
Если искомой |
величиной является |
реакция связи, то следует |
соответствующей реакцией.
Дальнейший ход решения задачи зависит от того, сколько степеней свободы имеет исследуемая механическая система.
В случае механической системы с одной степенью свободы:
1.Дать возможное перемещение одной из точек механической системы и выразить возможные перемещения точек приложения сил в зависимости от заданного возможного перемещения.
2.Вычислить сумму элементарных работ активных сил и реакций связей на возможных перемещениях точек приложения сил и приравнять её нулю.
3.Выразить возможные перемещения точек приложения сил через перемещение какой–либо одной точки и, подставив полученные соотношения в уравнение работ, определить искомую величину.
Для механической системы с несколькими степенями свободы:
4.Выбрать независимые возможные перемещения точек механической системы в числе, равном числу степеней свободы этой системы.
5.Сообщить возможное перемещение, соответствующее одной из степеней свободы механической системы, считая при этом возможные
перемещения, соответствующие остальным степеням свободы, равными нулю. Составить уравнение работ, выражающее принцип возможныхДИ
124
перемещений, для каждого независимого перемещения. Используя связи между возможными перемещениями точек приложения сил на каждом независимом перемещении, преобразовать полученные уравнения работ (как в случае механической системы с одной степенью свободы).
Аналитический метод позволяет формализовать процесс решения задачи. Он заключается в определении работ задаваемых сил на возможном перемещении системы через проекции сил и проекции возможных перемещений на декартовы оси координат:
|
|
|
|
|
n |
|
Fky yk Fkz zk 0 , |
|
(1) |
|||
|
|
|
|
|
Fkx xk |
|
||||||
|
Fkx , |
|
Fky , |
Fkz – |
k 1 |
|
k-й |
|
δxk , |
δyk , |
δzk – |
|
здесь |
|
проекции |
силы; |
проекции |
||||||||
С |
|
точки приложения этой силы на оси. |
||||||||||
|
||||||||||||
возможного перемещен я sk |
||||||||||||
Проекц |
|
возможных |
перемещений |
вычисляют |
путем записи |
|||||||
уравнен й коорд нат для точек приложения сил и применения к этим |
||||||||||||
уравнен ям |
|
операц |
|
варьирования |
(аналогичной |
операции |
||||||
|
|
|
рован я функции). |
|
|
|
|
|
|
|||
дифференц |
|
|
|
|
|
|
||||||
План решен я задачи. |
|
|
|
|
|
|
|
|||||
1. |
Показать все задаваемые силы и моменты действующих пар сил. |
|||||||||||
2. |
Выбрать неподвижную систему декартовых координат, связав ее с |
|||||||||||
телом, которое |
при |
возможном |
перемещении |
системы |
остается |
|||||||
|
|
б |
|
|
|
|
||||||
неподвижным. |
|
|
|
|
|
|
|
|
|
|||
3. |
Вычислить проекции заданных сил на оси Fkx , Fky , Fkz . |
|
||||||||||
4. |
Записать уравнения координат точек приложения сил xk, yk, zk. |
|||||||||||
5. |
Найти значения δxk , |
δyk |
, δzk |
дифференцированием уравнений |
||||||||
|
|
|
|
А |
|
|
||||||
координат по выбранному обобщенному параметру. |
|
|
|
|||||||||
6. |
Записать уравнение возможных работ по формуле (1). |
|
||||||||||
7. |
Определить искомый параметр. |
|
|
|
|
|
||||||
Задачи на применение принципаДвозможных перемещений рекомендуется решать по следующему алгоритму.
1.Изобразить рассматриваемую механическую систему на рисунке в соответствующем масштабе.
2.Приложить к механической системе активные нагрузки.
3.При наличии неидеальных связей добавить соответствующие реакции связей (например, силы трения).
4.Для определения реакции связи эту реакцию перенести в разряд активных сил путём замены существующей связи на связь, допускающую возможное перемещение в направлении, как правило, противоположном направлению определяемой реакции связи.
5.Задать возможное перемещение одной из точек механической
системы и выразить возможные перемещения точек приложения сил в зависимости от заданного возможного перемещения.И
125