Материал: 2020
из связанной системы координат кузова в неподвижную систему координат. Компоненты векторов аэродинамических сил и моментов определяются по хорошо отработанным и экспериментально проверенным формулам с использованием коэффициентов: аэродинамического сопротивления, плотности воздуха, лобовой площади автомобиля, скорости натекания невозмущенного воздушного потока, боковой и подъемной силы.
Спомощью разработанного описания можно провести анализ влия-
ния аэродинамики на управляемость автомобиля. При этом рассчитывается маневр «переставка» на скорости 80 км/ч. Для выполнения маневра по-
добран закон поворота рулевого колеса автомобиля. Длина переходного
динамическучастка переставки составляет 30 м, боковое смещение – 3 м. Расчеты проводил сь при коэфф циенте сцепления шин 0,7. Центр действия аэро-
х с л наход лся в плоскости дороги в центральной точке, делящей расстоян е между мостами автомобиля пополам, что соответствует положен ю центра пр ведения сил в испытаниях. Рассматриваются параметры дв жен я автомо иля при совершении маневра «переставка» в случае нал ч я дополн тельной ветровой нагрузки. Ветровая нагрузка в модели аэрод нам ческ х сил задается раздельно в продольном и боковом направлен ях. Направление продольного ветрового потока может быть встречным или попутным, поперечного – левым или правым. Большое влияние на изменение траектории автомобиля оказывает боковой ве-
тер, встречный ветер увеличивает его на 10 – 15%.
бА Тема 6.2. МатематическаяДмодель для расчетной оценки
управляемости и устойчивости автомобиля на основе ограниченного количества полигонных испытаний
управляемости и устойчивости автомобиля на основе ограниченного количества полигонных испытаний.
Использование математической модели для расчетной оценки И
Математическая модель для имитационных исследований, базирующаяся на экспериментальных данных натурных испытаний, может обладать достаточной работоспособностью и точностью. Математическая модель описывает «одноколейный» автомобиль с характеристиками «приведенных» шин, включающими в себя динамические параметры реальных шин, системы подрессоривания, кузова и трансмиссии. Модель автомобиля, эквивалентного исследуемому, имеет пять степеняей свободы. Принципиальная схема расчета параметров криволинейного движения автомобиля представлена на рис. 33.
86
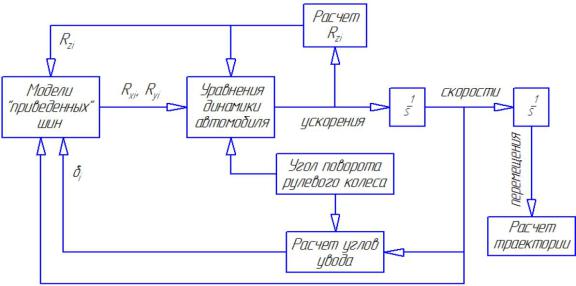
ССредствамиР . 33. Схема расчета параметров движения автомобиля
MatLab Simulink определяются коэффициент аэродинамического сопротбАвлен я и приведенный коэффициент сопротивления движению. В соответств с известной развесовкой автомобиля в статическом положении, определенной стендовым взвешиванием, рассчитывается положение центра масс «снаряженного» автомобиля. Приняв в качестве допущения представление автомо иля в виде плоского физического тела, состоящего из четырех сосредоточенных масс, приходящихся на контактные поверхности пневматических шин с опорной поверхностью, по формуле определяются значения главныхДмоментов.
Тема 6.3. Математическое моделирование подвески АТС с учетом особенностей работы гидроамортизатораИ
Математическое моделирование подвески АТС с учетом особенностей работы гидроамортизатора.
При математическом моделировании подвески одним из важнейших факторов является правильный учет работы амортизатора. При разработке структур модели гидравлического амортизатора и исследовании их в составе модели стойки АТС оценка работы амортизатора проводится по следующим критериям:
1) по передаточной функции зависимости усилия в амортизаторе от скорости его относительного перемещения в частотном диапазоне колебаний подвески (передаточной характеристики);
87
2) по сдвигу фаз между скоростью относительного перемещения амортизатора и усилием в нем в частотном диапазоне колебаний подвески (по фазовой характеристике).
Данные критерии представляются наиболее эффективными для выявления закономерностей поведения гидравлического амортизатора при случайном возмущении в типичных условиях эксплуатации. Для разработки модели как отдельной стойки, так и полной модели подвески АТС используется программный комплекс ФРУНД (формирование решения уравнен й нел нейной д намики). Формирование уравнений движения производ тся в нем на основе уравнений Лагранжа первого рода. Численное решен е уравнен й движения системы производится при помощи яв-
Сных методов высокого порядка.
амортизатора рующего элементабА3 ( ).
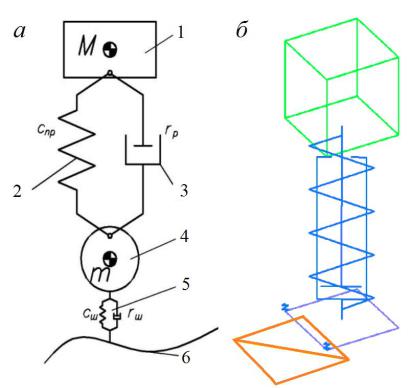
В структуре упрощенной модели стойки (рис. 34) присутствуют под-
рессоренная 1 неподрессоренная 4 массы, взаимодействующие между собой посредством упругого элемента подвески 2 (пружины) и демпфи-
Д И
Рис. 34. Модель стойки АТС со стандартной структурой модели амортизатора: а – структура модели; б – модель в системе моделирования FRUND;
1 – подрессоренная масса; 2 – пружина; 3 – амортизатор; 4 – неподрессоренная масса (колесо); 5 – упруго-демпфирующие свойства шины;
6 – кинематическое возмущение со стороны микропрофиля
88
На неподрессоренную массу 4 также действует посредством упругодемпфирующих свойств шины 5 кинематическое возмущение 6, в качестве которого выбран микропрофиль, соответствующий ровному булыжнику (дороге удовлетворительного качества), что наиболее точно отражает условия эксплуатации подвески. В качестве кинематического возмущения в исследовательских целях возможно использование гармонического про-
Сфиля и единичной неровности.
Основные допущения при моделировании:
- возмущающее воздействие задается в виде кусочно-линейного
микропроф ля с шагом 10 см без учета его податливости;
ными .
массами- воздейств е от дороги осуществляется только в вертикальном направлен ; подрессоренные и неподрессоренные части считаются точеч-
Параметры модели гидроамортизационной стойки соответствуют номинальнымавтомобиляхарактер стикам ВАЗ-2110.
Тема 6.4. ПрАменение метода конечных элементов
для моделирования ударов автомобиля
Использование метода конечных элементов (МКЭ) для моделирования столкновений автомобилей с целью выявления недостатков конструкции, отрицательно влияющих наДбезопасность пассажиров и при реконструкции обстоятельств ДТП.
В середине 80-х гг. прошлого века в США инженерами были построены и проанализированы первые полные модели автомобильных аварий, а их промышленное применение стало возможнымИс появлением в то время первых суперкомпьютеров. Так, например, уже в то время правительство Германии финансировало проект для исследования возможности численного моделирования автомобильных аварий на примере двух моделей автомобилей – "Фольксваген-Поло" и БМВ-300. Развитие применения численных методов в последующие десятилетия привело к тому, что МКЭ сегодня является инструментом, полностью интегрированным в процесс проектирования транспортного средства и элементов дороги, обеспечивающих безопасность.
Сейчас конкурентоспособное развитие отрасли невозможно без МКЭ-систем проектирования, которые уже с середины 90-х гг. используются всеми ведущими автомобилестроительными компаниями. Так, на-
89
пример, фирма "Меседес-Бенц" для всех важных случаев ударного нагружения располагает детальными конечно-элементными аналогами более 30 моделей автомобилей с числом элементов более 200 тыс. каждая и моделями манекенов водителя и пассажиров, которые непрерывно модифицируются, чтобы отслеживать соответствие требованиям стойкости при авариях. В некоторых случаях МКЭ является единственным выбором, так как
Смногочисленные требования и стандарты безопасности превышают возможности организации и анализа результатов натурных краш-тестов.
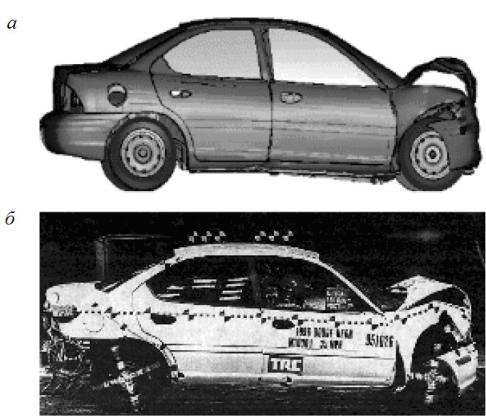
Рассмотр м некоторые примеры проверки расчетов МКЭ для ударов автомоб лей. Нац ональным центром анализа аварий (NCAC) универси-
сравнениетета им. Д. Ваш нгтона (США) на конечно-элементном аналоге из более чем 270 тыс. элементов был смоделирован краш-тест автомобиля "Додж
Неон" 1996 г., про зведенный сертифицированной лабораторией "Центр исследован я транспорта" из штата Огайо по контракту с Департаментом транспорта бАША. Скорость фронтального удара автомобиля в жесткий недеформ руемый неподвижный арьер была 56 км/ч. На рис. 35 показано расчетной фактической деформаций автомобиля.
Д И
Рис. 35. Расчетная (а) и фактическая(б) деформации автомобиля
90