Материал: 2015 [Тынчеров] Основы автоматизации ТПНП
применение типовых узлов, аппаратов и ряд др. Непосредственно к самой САУ все требования можно разбить
на следующие четыре категории:
требования к величине запаса устойчивости;
требования к величине отклонения регулируемого параметра в установившемся режиме (статическая точность);
требования к поведению системы в переходном процессе (качество переходного процесса);
требования к динамической точности системы, т. е. к величине отклонения при наличии непрерывно изменяющихся воздействий [42, 43].
1.2. Передаточные функции линейных систем. Структурные схемы и их преобразования
При исследовании САР широко используются структурные схемы, которые представляют собой условное графическое изображение дифференциального уравнения.
При составлении структурных схем каждое звено системы (группа звеньев) обозначается прямоугольником, в который вписывается его передаточная функция. При этом различают четыре основных типа дифференциальных уравнений [42, 43]:
1. |
Звено с одной входной и одной выходной величиной (рис. |
|||||||
1.8); уравнением изображения этого звена будет: |
|
|||||||
|
|
|
|
|
X (s) W (s)F(s) , |
|
(1.18) |
|
ƒ |
|
|
|
|
x |
|
Рис. 1.8 — Звено с одной входной |
|
|
W(s) |
|
|
|
||||
|
|
|
и одной выходной величиной |
|
||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||
2. |
Безинерционное звено с коэффициентом передачи К (рис. |
|||||||
1.9): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x(t) Kf (t) |
(1.19) |
|
|
ƒ |
|
|
|
x |
Рис. 1.9 — Безинерционное звено |
|
|
|
|
К |
|
|
||||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
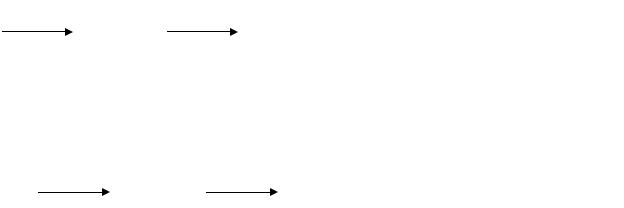
3. Звено с двумя входными и одной выходной величиной (рис.
1.10):
|
|
|
X (s) W (s)[F (s) F (s)] |
|
(1.20) |
||||
|
|
|
|
|
1 |
2 |
|
|
|
ƒ1 |
+ |
|
x |
ƒ1 |
+ |
|
|
|
x |
|
W(s) |
|
|
W(s) |
|||||
|
|
|
|
|
|
||||
ƒ2
ƒ2
Рис. 1.10 — Две формы представления звена с двумя входными
иодной выходной величиной
4.Звено с двумя передаточными функциями и двумя входными сигналами (рис. 1.11):
|
X (s) W (s)F (s) W (s)F (s) |
(1.21) |
|||||||
|
|
1 |
1 |
2 |
2 |
|
|
|
|
|
ƒ2 |
|
|
ƒ1 |
|
|
|
|
|
x |
|
|
|
W1(s) |
|
x |
|||
|
|
|
|
|
|
||||
ƒ1 |
W2(s) |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|||
|
W1(s) |
|
|
ƒ |
|
|
W2(s) |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.11 — Две формы представления звена с двумя передаточными функциями и двумя входными сигналами
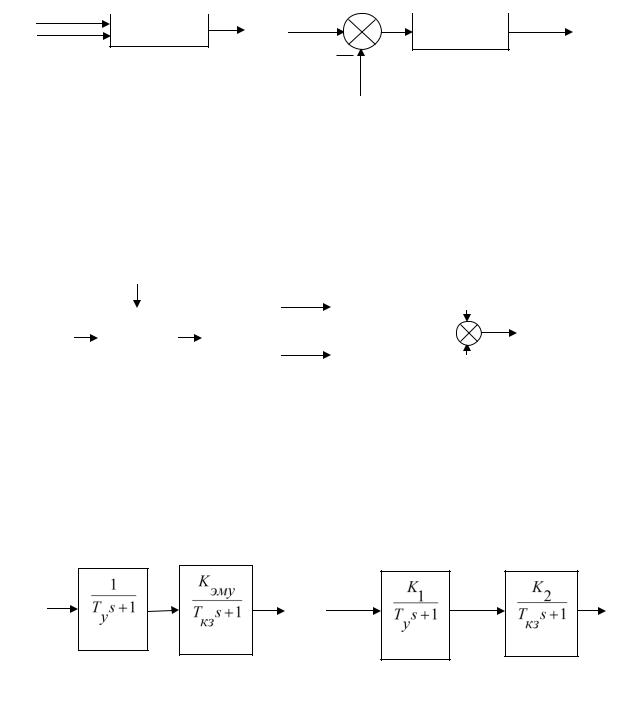
Используя эти изображения, составляются структурные схемы. Пример структурной схемы ЭМУ в виде двух звеньев первого
порядка:
Uу |
E′q |
Ed |
Uу |
Eq |
Ed |
или
Рис. 1.12 — Структурная схема ЭМУ
Здесь: |
K |
1 у |
; |
K |
|
|
2 q |
и |
K |
|
K K |
|
. |
|
2 |
|
эму |
2 |
|||||||||
|
1 |
rу |
|
|
rq |
|
|
1 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||
Для исследования системы необходимо знать ее передаточную функцию, для чего необходимо познакомиться с преобразованиями структурных схем.
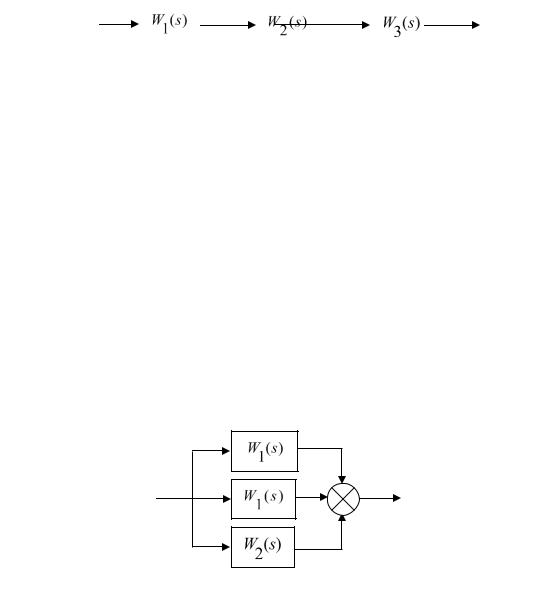
1. Последовательное соединение звеньев: вход каждого последу-
ющего звена соединяется с выходом предыдущего (рис. 1.13).
X1 |
|
Х2 |
|
Х3 |
|
Х4 |
|
|
|
||||
|
|
|
|
|
|
|
Рис. 1.13 — Последовательное соединение звеньев
X 2(s) W1(s) X1(s) , |
X3(s) W2(s)X2(s) , |
X4(s) W3(s)X3(s) |
|
||
и |
X4 |
(s) W1(s) W 2 (s) W3(s) X1(s) W (s) X1(s) |
(1.22) |
||
|
|
||||
Итак, передаточная функция последовательно соединенных звеньев равна произведению передаточных функций отдельных звеньев:
|
W (s) W1(s) W2(s) W3(s) |
(1.23) |
|
2. Параллельное соединение звеньев: входная величина одинакова |
|||
для звеньев, а выходные величины суммируются (рис. 1.14): |
|
||
X1(s) W1(s) Xвх(s) , |
X2(s) W2(s) Xвх(s) , |
X3(s) W3(s) Xвх(s) |
(1.24) |
Уравнение сумматора: |
|
|
|
Xвых(s) X1(s) X2(s) X3(s) [W1(s) W2(s) W3(s)] Xвх(s) . |
(1.25) |
||
|
|
Х1 |
Х |
вх |
Хвых |
|
Х2 |
|
|
|
|
|
|
Х3 |
Рис. 1.14 — Параллельное соединение трех звеньев
Передаточная функция:
W (s) W1(s) W2(s) W3(s) . (1.26)
Передаточная функция параллельно соединенных звеньев равна сумме передаточных функций звеньев.
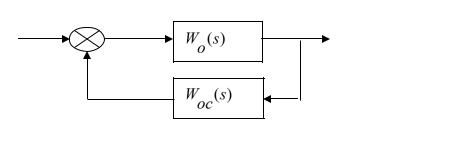
3. Охват звена обратной связью (рис. 1.15). Исходные уравне-
ния: |
Xвых(s) Wо(s) X (s) , |
(1.27) |
для охватываемого звена |
||
|
|
|
для звена обратной связи |
Xос(s) Wос(s) Xвых(s) |
(1.28) |
для сумматора |
X (s) Xвх(s) Xос(s) , |
(1.29) |
|
|
|
здесь знак «+» — для ПОС, |
знак «–» — для ООС. |
|
Хвх |
Х′ |
Хвых |
|
|
Хос
Рис. 1.15 — Охват звена обратной связью
В уравнениях исключаем промежуточные величины:
Xвых(s) |
|
Wo(s) |
|||
|
Wo |
(s) Woc(s) |
|||
|
1 |
||||
и передаточная функция:W (s) |
|
|
Wo(s) |
|
|
1 W (s) W (s) |
|||||
|
|
|
o |
oc |
|
Хв х(S) |
(1.30) |
. (1.31)
Основные правила преобразования структурных схем
1.Группу последовательного, параллельного соединения звеньев или охваченных обратной связью соединения звеньев можно заменить одним звеном с соответствующей передаточной функцией.
2.Точку приложения или съема воздействия можно переносить через одно или несколько звеньев, добавляя в преобразуемую цепь звено с такой
передаточной функцией, чтобы выходной сигнал этой цепи не изменился.
Пример преобразования структурной схемы системы с перекрестной обратной связью (опущен оператор s) показан на рисунке
1.16:
— для освобождения от перекрестной связи точка съема воздействия 1 переносится в точку 2 с добавлением в цепь обратной связи
(W5), звено с передаточной функцией W3 (в соответствии с правилом
2);
— находится передаточная функция звена W6 (последовательное соединение звеньев с передаточными функциями W3 и W5);
— находится передаточная функция звена W7 (охват звена с передаточной функцией W2 обратной связью — звено обратной связи с передаточной функцией W6);
— находится передаточная функция звена W8 (последовательное соединение звеньев с передаточными функциями W1 и W7);
— находится передаточная функция звена W9 (охват звена с передаточной функцией W8 обратной связью — звено обратной связи с передаточной функцией W4);
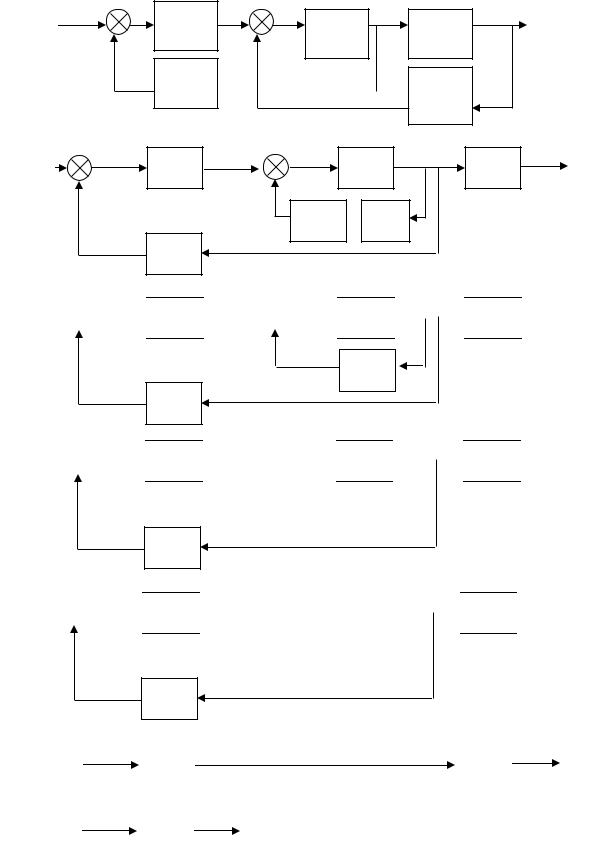
— находится передаточная функция звена W10 — системы (последовательное соединение звеньев с передаточными функциями W9
и W3) [42, 43].
Хвх |
W1 |
2 |
1 |
Хвых |
|
W2 |
W3 |
||||
|
|
||||
|
|
|
W4  W5
W5
Хвх |
|
2 |
|
1 |
W1 |
W |
W |
Хвых |
|
|
|
2 |
3 |
|
W3  W5
W5
W4
Хвх 
 W1
W1 

 W2
W2  W3
W3  Хвых
Хвых
W6
W4
Хвх 
 W1
W1  W7
W7  W3
W3  Хвых
Хвых
W4
Хвх 
 W8
W8  W3
W3  Хвых
Хвых
W4
Хвх |
W9 |
|
W3 |
Хвых |
Хвх |
W |
Х |
вых |
Рис. 1.16 — Пример преобразования |
|
||||
|
10 |
|
структурной схемы |
|
|
|
|
|