Материал: 2015 [Тынчеров] Основы автоматизации ТПНП
результирующая характеристика Хвых3 = k1k2k3Хвх1.
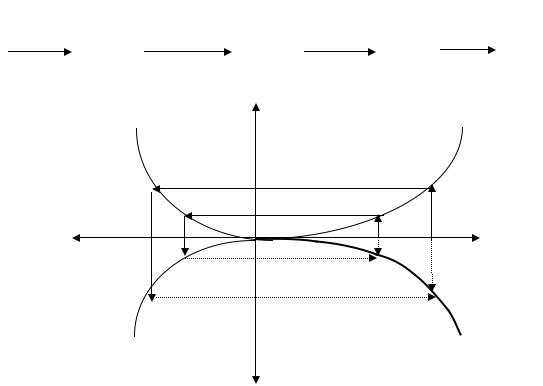
В первом квадранте построена статическая характеристика
Хвых1= ƒ (Хвх1)
а)
Хвх1 |
|
Хвых1 |
|
Хвх3 |
3 |
Хвых3 |
|
1 |
2 |
||||||
|
Хвх2 |
Хвых2 |
|
||||
|
|
|
|
|
|||
|
|
|
|
|
бХ)вх2=Хвых1
|
|
1 |
Хвых2=Хвх3 |
• |
Хвх1 |
Хвых3
б)
Рис. 1.25 — Последовательное соединение звеньев — а), построение статической характеристики системы из трех последовательно соединенных нелинейных звеньев — б)
Таким образом, в случае последовательного соединения линейных звеньев коэффициент передачи системы К равен произведению
коэффициентов передач отдельных звеньев: |
|
К = k1k2k3 . |
(1.43) |
Охват звена жесткой обратной связью. Звеном с обратной свя-
зью называется такое устройство, при помощи которого часть выходного сигнала передается на вход данного звена (или одного из предыдущих звеньев).
Когда передаваемое обратной связью воздействие зависит только от выходной величины и не зависит от времени, обратная связь называется жесткой. Схема имеет вид (рис. 1.26):
Хвх′ |
Хвх |
|
Хвых |
|
I
Хос 
II
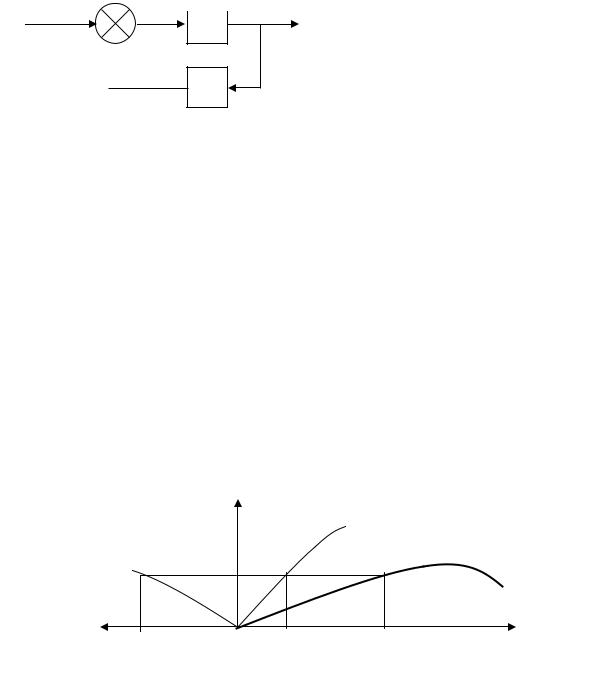
Рис. 1.26 — Схема звена, охваченного обратной связью:
I — охватываемое звено, II — звено обратной связи.
Согласно схеме: часть выходного сигнала звена I подается на его вход через звено II. Пусть статическая характеристика охватываемого звена (без обратной связи) Хвых = ƒ(Хвх) и статическая характеристика обратной связи Хос = φ (Хвых). Тогда статическая характеристика системы будет:
Хвых = ƒ [ Хвх′ ± φ (Хвых)]. |
(1.44) |
Знак «+» — при положительной обратной связи; «–» — при отрицательной связи.
В системах регулирования по отклонению регулятор, подключенный к объекту, образует отрицательную обратную связь, поскольку он стремится противодействовать возмущающему воздействию.
На рисунке 1.27 показано построение статической характеристики при отрицательной обратной связи.
|
|
Хвых |
|
|
|
|
|
|
|
I |
|
|
3 |
1 |
2 |
4 |
III |
|
|
|
|
|
|
II |
• |
• |
• |
• |
|
Хос |
Хвх′ |
0 |
Хвх |
Рис. 1.27 — Построение статической характеристики системы (звена), охваченного жесткой отрицательной обратной связью
В первом квадранте строится статическая характеристика охватываемого звена I, во втором — характеристика звена обратной связи II. Результирующая характеристика III строится в первом квадранте.
Для построения статической характеристики запишем уравнение
сумматора: Хвх = Хвх′ – Хос или Хвх′ = Хвх + Хос. Отсюда вытекает и правило построения суммарной характеристики: задаемся выходной
величиной системы — точка 1, по ней находим Хвх — точка 2 и Хос — точка 3; к отрезку 1–2 прикладываем отрезок 2–4, равный 1–3 — точка 4 является результирующей и т. д.
Отрицательная обратная связь (ООС) делает результирующую
характеристику более пологой, чем исходная, уменьшает коэффициент передачи звена.
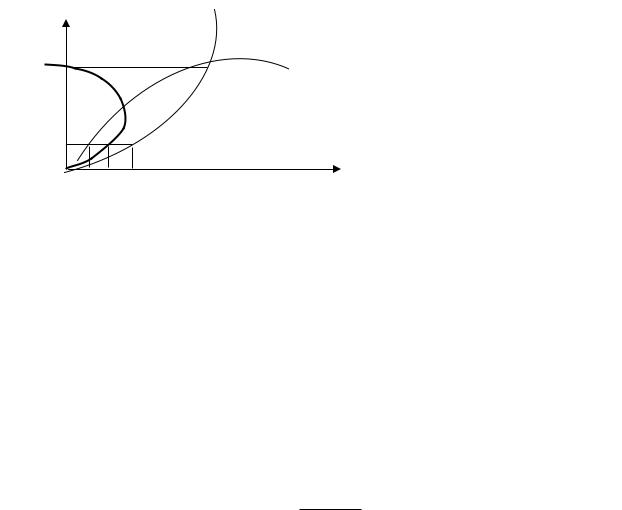
Рассмотрим статическую характеристику системы при положительной обратной связи (ПОС). На рис. 1.28 показано построение статической характеристики системы при ПОС. Характеристики охватываемого I звена и звена обратной связи II рисуются в одном (первом) квадранте. Для ПОС уравнение сумматора Хвх = Хвх′ + Хос, или Хвх′ = Хвх – Хос. Отсюда почти аналогичное, как и при отрицательной обратной связи, и построение характеристики: точка 2 результирующей характеристики определяется как разность отрезков (0 – 3) минус
(0 –1) и т. д.
I
Хвых
|
|
II |
Рис. 1.28 — Построение |
|
|
|
статической характеристики |
|
|
|
системы (звена), охваченной |
|
|
|
жесткой положительной об- |
|
|
|
ратной связью |
|
|
Хвх′ |
|
|
|
|
|
0 1 2 3 |
|
|
|
Хвх, Хос |
|
||
Положительная обратная связь делает результирующую характеристику более крутой, увеличивает коэффициент передачи.
Рассмотрим приведенных два случая для линейных звеньев:
Хвых = k0 Хвх и Хос = kос Хвых,
где k0 — коэффициент передачи охватываемого звена. Результирующая характеристика:
Хвых = k0 Хвх = k0 (Хвх′ ± kОС Хвых).
k
Xвых 1 kоk X′ вх . о ос
Здесь знак минус относится к ПОС, знак плюс — к ООС. Коэффициент передачи звена с обратной связью:
|
kо |
|
k |
|
. |
1 kоkос |
||
(1.45)
(1.46)
(1.47)
(1.48)

ПОС увеличивает коэффициент передачи, ООС — уменьшает
[42, 43].
1.4. Понятие об устойчивости систем автоматического регулирования
Всякая САР подвержена воздействию возмущающих сил. Эти силы стремятся вывести систему из состояния равновесия. Если система устойчива, то она противостоит действию возмущающих сил, а будучи выведенной из равновесия, возвращается к нему с определенной точностью. Неустойчивая система после действия возмущающих сил не возвращается к равновесному состоянию, а либо удаляется от него, либо совершает недопустимые колебания около равновесного состояния.
Понятие устойчивости может быть проиллюстрировано на примере шар-плоскость (рис. 1.29).
Пример 1. Рассмотрим рисунок 1.29, а. Под действием возмущающих сил шар переместился из точки Ао в точку А1. После действия этих сил шар вернется в точку Ао — положение шара на вогнутой плоскости устойчиво. Поскольку есть трение, то, конечно, шар вернется не точно в точку Ао, а остановится рядом. Система будет устойчивой, если она от возмущенного состояния перейдет в некоторую конечную область, окружающую невозмущенное состояние равновесия.
Здесь и далее точка Ао — невозмущенное состояние равновесия системы, точка А1 — возмущенное состояние системы.
Пример 2 — рисунок 1.29, б. Здесь шар не вернется в свое состояние равновесия в точку Ао — случай неустойчивого положения шара на плоскости.
А0а) |
А1 б) |
в) |
г) |
д) |
Рис. 1.29 — Иллюстрация понятия устойчивости на примере плоскости и шара
Есть и другие виды систем.
Пример 3 — рисунок 1.43, в. Система устойчива в малом, но неустойчива в большом.
Пример 4 — рисунок 1.29, г. Полуустойчивое состояние равнове-
сия.
Пример 5 — рисунок 1.29, д. Безразличное состояние равновесия
[20, 31, 42, 43].