Материал: 2015 [Тынчеров] Основы автоматизации ТПНП
1.3. Статика систем автоматического регулирования
Статика регулирования изучает равновесные, установившиеся состояния, которые имеют место при постоянных значениях возмущающих и управляющих воздействий на систему.
В результате изменения воздействия от одного постоянного значения до другого в системе возникает переходный процесс. Если САР устойчива, то координаты системы при этом будут стремиться к некоторым установившимся значениям. Эти конечные значения и рассматривает статика.
1.3.1. Статические характеристики элементов и звеньев САР
Всякий элемент системы регулирования может характеризоваться несколькими входными и выходными координатами (рис. 1.17).
Хвх1 |
|
Хвых1 |
Рис. 1.17 — Звено |
|
|
|
автоматической |
Хвх m |
|
выхℓ |
системы |
|
Х |
|
|
Для звена в целом можно записать ℓ уравнений: |
|||
Хвых1 = ƒ1 (Хвх1, …Хвх m) |
|
(1.32) |
|
Хвых2 = ƒ2 (Хвх2, …Хвх m) |
Эта система уравнений, описывающая |
||
|
|
установившийся процесс, называется |
|
Хвых ℓ= ƒℓ (Хвх ℓ, …Хвх m ) |
уравнениями статики звена. |
||
Уравнения статики могут быть получены из уравнений динамики при приравнивании нулю всех производных от координат и от возмущающих воздействий, поскольку значения тех и других в установившемся режиме постоянны.
Возьмем частный случай, когда звено характеризуется одной координатой (одно управляющее воздействие, рис. 1.18). Статическая характеристика такого звена: Хвых = ƒ(Хвх).
Хвх |
|
Хвых |
Рис. 1.18 — Звено с одним |
|
управляющим воздействием |
||
|
|
|
Такими простейшими статическими характеристиками описываются многие измерительные, преобразовательные, усилительные, управляющие элементы систем регулирования.

Взависимости от вида функции ƒ(Хвх) звенья разделяются на:
статические, обладающие статической характеристикой,
астатические, не имеющие статической характеристики. Статические характеристики, в свою очередь, делятся на линей-
ные, у которых функция ƒ(Хвх) в рассматриваемом диапазоне изменения Хвх и Хвых есть линейная функция:
Хвых = а + bХвх, |
(1.33) |
где а и b — постоянные,
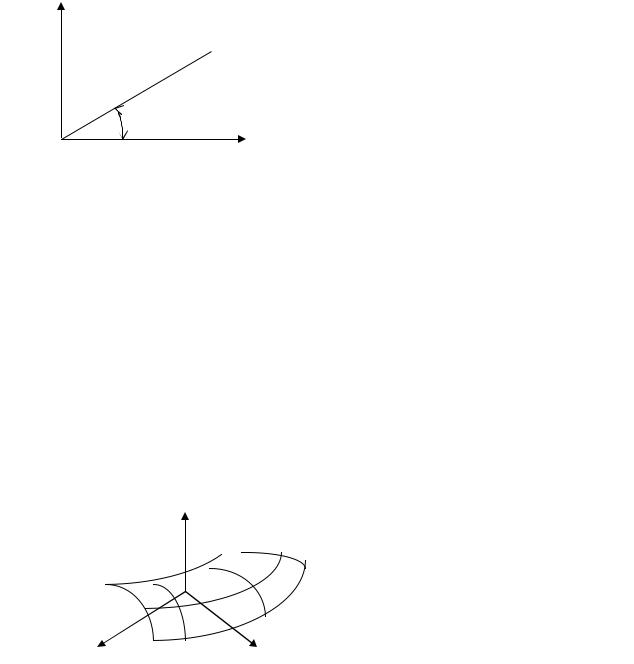
и нелинейные, у которых функция ƒ(Хвх) имеет более сложный вид. Графически статическая характеристика линейного звена прямая
(рис. 1.19). Примером статической характеристики линейного звена является характеристика ненагруженного тахогенератора: E = к ω (коэффициент а = 0),
где E — ЭДС тахогенератора; ω — угловая скорость; k — коэффициент передачи тахогенератора.
Хвых
arctgb
а |
Хвх |
Рис. 1.19 — Статическая ха- |
|
||
|
рактеристика линейного звена |
|
|
|
Часто уравнение статики линейного звена приводят к виду, чтобы вместо текущих значений координат фигурировали их отклонения от некоторого начального значения:
Хвх = Хвх – Хо вх, |
(1.34) |
где Хо вх — начальное значение; Хвх — текущее значение. |
|
Аналогично |
|
Хвых = Хвых – Хо вых. |
(1.35) |
Подставим в первоначальное уравнение статики: |
|
Хо вых + Хвых = а + b (Хо вх + |
Хвх) |
Очевидно, для начального состояния |
|
Хо вых = а + bХо вх |
(1.36) |
Вычтем из (1.30) (1.31), получим уравнение статики в отклонениях:
Хвых = b· Хвх |
(1.37) |
Видно, что выбыл коэффициент а, т. е. характеристика по уравнению статики в отклонениях всегда проходит через начало координат с тем же углом наклона (рис. 1.20):
Хвых
arctgb |
Хвх |
Рис. 1.20 — Статическая характери- |
|
стика линейного звена в отклонениях |
|
|
|
|
|
|
|
В САР есть звенья, характеризующиеся двумя входными координатами и одной выходной. К таким звеньям относятся все объекты регулирования: входными координатами объекта регулирования является регулирующее воздействие и возмущение. Статическая характеристика в данном случае выглядит:
φ = ƒ (μ, q), |
(1.38) |
где φ — регулируемая величина объекта; μ — регулирующее воздействие;
q — нагрузка.
Графически в треугольной системе координат функция изображается в виде поверхности (рис. 1.21).
φ
Рис. 1.21 — Функция в треугольной системе координат
μ |
q |
Подобное изображение весьма неудобно. Поэтому статические характеристики объектов представляются на плоскости в виде семейства характеристик (рис. 1.22) [42, 43]:
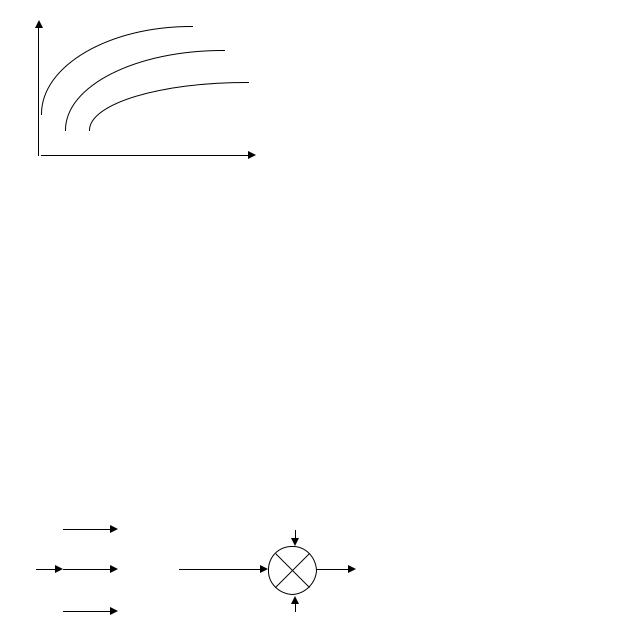
φ = ƒ1 (μ) |
|
q=const |
, |
либо φ = ƒ2 (q) |
|
μ= const |
|
|
|||||
|
|
|
|
|
||
|
|
|
φ |
q1 = const |
|
q2 = const
q3 = const
μ
Рис. 1.22 — Статические характеристики, представленные в виде семейства кривых
1.3.2. Статические характеристики соединений звеньев
Многие звенья САР по своей конструкции являются направленными, т. е. воздействия в них передаются только в одном направлении. Ниже рассматриваются звенья направленного действия.
Наиболее употребительными соединениями звеньев являются:
параллельное,
последовательное,
охват звена жесткой обратной связью.
Параллельное соединение звеньев. При параллельном соедине-
нии звеньев входные координаты всех звеньев равны, а выходные суммируются (рис. 1.23):
Хвх1 = Хвх2 = Хвх3 = Хвх, |
Хвых = Хвых1 + Хвых2 + Хвых3 |
(1.39) |
|||||
|
|
|
|
|
|
|
|
|
Хвх1 |
1 |
Хвых1 |
|
|
|
|
Хвх |
Хвх2 |
Хвых2 |
|
Хвых |
Рис. 1.23. Параллельное |
||
|
|
||||||
|
|
||||||
2 |
|
||||||
|
|
|
|||||
|
|
|
соединение звеньев |
|
|||
|
Хвх3 |
|
Хвых3 |
|
|
|
|
|
|
|
|
|
|||
|
3 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
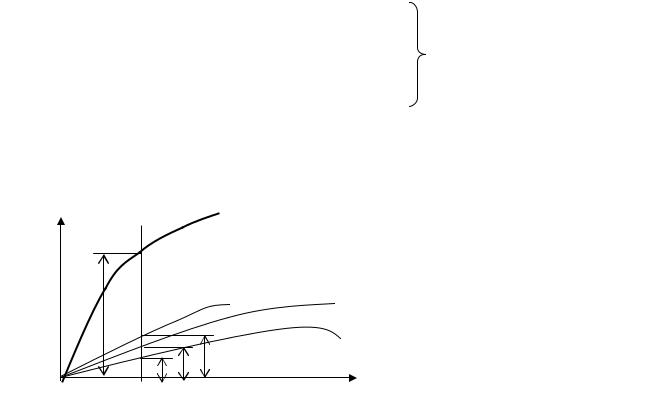
Для построения статической характеристики параллельных звеньев необходимо в одной системе координат с одинаковым масштабом построить статические характеристики отдельных звеньев и их ординаты сложить (рис. 1.24).
При линейных статических характеристиках:
Хвых1 |
= k1 |
· Хвх1, |
|
Хвых2 |
= к2 |
· Хвх2, |
|
Хвых3 = к3 · Хвх3, |
(1.40) |
||
………………….
Хвых = (k1 + k2 + k3+…+ kn) Хвх = К · Хвх
Хвых– результирующая
Хвых
1 |
2 |
∑
3
Хвх
Рис. 1.24 — Построение статической характеристики системы из трех параллельно соединенных звеньев с нелинейными характеристиками
Статический коэффициент передачи параллельно соединенных звеньев равен сумме коэффициентов передачи отдельных звеньев:
К = (k1 + k2 + k3+…+ kn) (1.41)
Последовательное соединение звеньев. При последовательном соединении направленных звеньев выходные координаты предыдущего звена являются входными координатами последующего.
Для построения результирующей характеристики строятся отдельные характеристики в разных квадрантах. Наиболее простым является случай построения трех звеньев (рис. 1.25). Для этого в первом квадранте строят характеристику первого звена, во втором квадранте
— характеристику второго звена, в третьем — третьего. Зададимся некоторым значением Хвх1 (точка 1), ему соответствует Хвых1, которое
равно Хвх2 и т. д.
При последовательном соединении более трех звеньев сначала проводится их комбинация по три, находятся характеристики групп по три звена в каждой и аналогичным способом находится затем уже характеристика соединения.
При последовательном соединении линейных звеньев (частный случай):
Хвых1 = k1 Хвх1,
Хвых2 = k2 Хвх2, (1.42)
Хвых3 = k3 Хвх3,