Материал: 2015 [Тынчеров] Основы автоматизации ТПНП
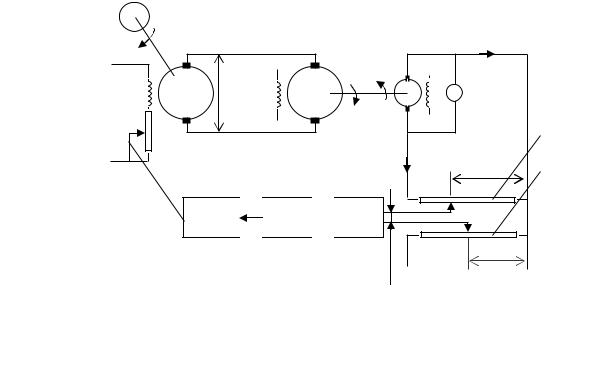
та Мс сопротивления на валу двигателя) изменяется вырабатываемое тахогенератором напряжение обратной связи Uос, нарушается равно-
весие (∆U ≠ 0), что приводит по цепочке (ЭУ – РД – Ред – Р – Iовг) к изменению вырабатываемого генератором напряжения Uг и к вос-
становлению регулируемой величины ω.
В рассмотренной схеме контроль регулируемой величины осуществляется активным способом, а цепь передачи сигнала с выхода на вход системы называется главной обратной связью.
Принцип регулирования, который показан в схеме (рис. 1.4),
называется принципом регулирования по отклонению. Системы, ко-
торые строятся по такому принципу, всегда содержат обратную связь. Вывод: они работают по замкнутому циклу.
|
|
вд |
ωВД |
|
|
|
+ |
ø |
|
|
_ |
ø |
МС |
|
|
|
||||
|
ОВГ |
г |
|
|
д |
|
|
|
р |
UГ |
+ |
ø |
ω |
_ |
|
|
|
|||
ø |
• |
|
ОВД |
|
||
|
|
|
|
|
||
Ред 
 РД
РД  ЭУ
ЭУ
∆U
+ø |
|
|
тг |
V |
|
|
|
|
-ø |
|
|
|
|
Р1 |
|
UОС |
Р2 |
|
|
• |
|
|
• |
Ø + |
Uзад |
- Ø |
|
|
Рис. 1.4 — Вариант преобразования схемы ручного регулирования в автоматическую систему регулирования
частоты оборотов вала двигателя
Под системой автоматического регулирования по отклоне-
нию понимают такую систему, при работе которой измеряется отклонение регулируемой величины от заданного значения, а в функции от значения отклонения вырабатывается некое регулирующее воздействие, сводящее это отклонение к минимальному значению.
В последующем будем считать, что системы регулирования по отклонению всегда содержат главную отрицательную обратную связь (ГООС).
Еще одним принципом регулирования, который гораздо реже используется в автоматических регуляторах, является принцип регули-
рования по возмущению, или принцип компенсации, а также компенсация возмущения.
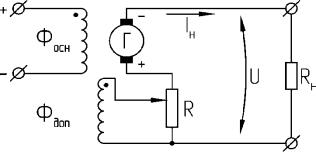
Рисунок 1.5 иллюстрирует схему работы генератора постоянного тока. Данная иллюстрация поясняет принцип регулирования по возмущению. Здесь генератор работает на изменяющуюся нагрузку Rн. Напряжение U является регулируемой величиной. ЭДС генератора пропорциональна потоку возбуждения Φв ≡ Ег = k Φв.
Будем считать, что изменение напряжения на зажимах генератора обуславливается только внутренним сопротивлением якорной цепи:
U = Е – Iн· Rа, |
(1.2) |
Е = U + Iн· Rа = Iн· Rн + Iн· Rа = Iн (Rа + Rн) |
(1.3) |
Рис. 1.5 — Принципиальная схема регулятора, использующего принцип регулирования по возмущению
Пусть при изменении тока Iн напряжение U = Uо = const. Тогда
должно быть выполнено следующее условие: |
|
Е= Uо + Е = Uо + IнRа = k (Φво + ΔΦв). |
(1.4) |
Значит, Е изменится за счет: |
|
Φв·Uо = k ·Φво и ΔΦв = (Rа/k)·Iн = c Iн, |
(1.5) |
т. е. изменение регулируемой величины Φ должно быть пропорционально току нагрузки Iн. Это условие выполняется за счет компаундной обмотки, дающей дополнительный поток возбуждения Φдоп, пропорциональный нагрузке возмущения — току IН. Исходя из этого, основная обмотка (основной поток возбуждения Фосн) предназначается для создания начального напряжения UО. Значение Е определяется компаундной обмоткой. Обе обмотки создают суммарный магнитный
поток Фво.
В результате изменения тока нагрузки IН меняется суммарный поток Фво, а напряжение Uо постоянно. Это и есть пример реализации
принципа компенсации в регулировании, когда при измерении
нагрузки (возмущающем воздействии) в функции от измеренного значения вырабатывается некое регулирующее воздействие, которое позволяет регулируемой величине оставаться постоянной. Системы, работающие по такому принципу компенсации, относятся к системам разомкнутого типа, не имеющим обратной связи.
Основное достоинство таких систем — быстродействие. Вместе
стем система обладает и рядом недостатков:
за счет того что у объекта есть несколько возмущающих воздействий, для систем компенсации нужно измерять в отдельности каждое возмущающее воздействие и в функции от него вырабатывать регулирующее воздействие, что значительно усложняет систему;
проблема измерения неэлектрических возмущающих воздей-
ствий;
неоднозначность и сложность зависимости регулирующего воздействия от возмущающего воздействия.
Из-за указанных недостатков рассмотренные системы применяются гораздо реже в сравнении с системами, реализующими принцип регулирования по отклонению.
Третий принцип регулирования — комбинированный (сочетание первых двух принципов). Применяется еще реже, чем первые два. Достоинства и недостатки такие же. Системы довольно сложные, и их изучение пока не предусмотрено [42, 43].
1.1.2. Классификация систем автоматического регулирования
По закону воспроизведения (изменения) регулируемой величины замкнутые системы регулирования делятся на три вида:
системы стабилизации,
системы программного регулирования,
следящие системы [42].
Отличаются они друг от друга не принципиально, а лишь режимом работы и конструктивно. Они имеют общую теорию и исследуются одинаковыми методами.
Система стабилизации — это система поддержания постоянства регулируемой величины. Рассмотренные выше системы относятся к системам стабилизации.
В системах программного регулирования регулируемая величина должна изменяться по заранее известной программе во времени.
Следящая система. Здесь регулируемая величина изменяется по неизвестному произвольному закону. Закон определяется некоторым
внешним задающим воздействием (произвольно).
Взависимости от характера регулирующего воздействия на исполнительный элемент системы автоматического регулирования подразделяются на:
системы непрерывного,
импульсного,
релейного регулирования.
Всистемах непрерывного регулирования сигналы на выходе всех элементов системы являются непрерывными функциями сигналов на входе элементов.
Системы импульсного регулирования отличаются тем, что в них через определенные промежутки времени происходит размыкание и замыкание контура регулирования специальным устройством. Время регулирования делится на импульсы, в течение которых процессы протекают так же, как и в системах непрерывного регулирования, и на интервалы, в течение которых воздействие регулятора на систему прекращается. Такие регуляторы применяются для регулирования медленно протекающих процессов (регулирование температуры в промышленных печах, температуры и давления в котлах).
Всистемах релейного регулирования размыкание контура регулирования производится одним из элементов системы (релейным элементом) в зависимости от внешнего воздействия.
Взависимости от результатов, получаемых при автоматическом регулировании, различают два вида автоматического регулирования:
статическое,
астатическое.
Статическим называется такое автоматическое регулирование, при котором регулируемая величина при различных постоянных внешних воздействиях на объект регулирования принимает по окончании переходного процесса различные значения, зависящие от величины внешнего воздействия (например, нагрузки).
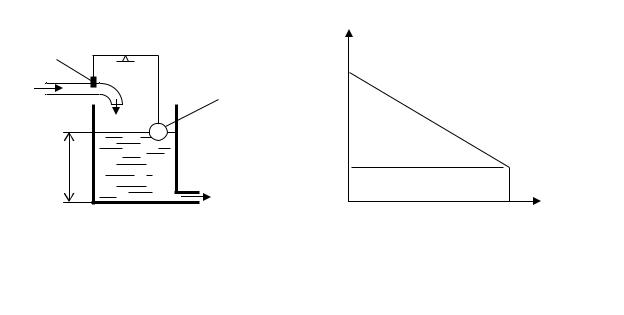
На рисунке 1.6, а представлен регулятор уровня воды в баке. В регуляторе уровня воды при увеличении расхода воды q уровень снижается, через поплавок и рычаг открывается задвижка, приток q1 возрастает и наоборот.
Система статического регулирования имеет следующие характерные свойства:
— равновесие системы возможно при различных значениях регулируемой величины;
— каждому значению регулируемой величины соответствует |
||||||||
единственное определенное положение регулирующего органа. |
||||||||
Для осуществления такой связи между датчиком и исполнитель- |
||||||||
ным элементом контур регулирования должен состоять из статиче- |
||||||||
ских звеньев, у которых в состоянии равновесия выходная величина |
||||||||
однозначно зависит от входной величины: xвых f (xвх) . Это объясня- |
||||||||
ется тем, что расход воды q равен притоку q1 |
при каком-то строго |
|||||||
определенном, |
своем уровне Н. |
Изменится расход, изменится уро- |
||||||
вень, приток будет равен расходу — и опять наступит равновесие. |
||||||||
Регулятор, осуществляющий статическое регулирование, называ- |
||||||||
ется статическим регулятором. |
|
|
|
|||||
Для характеристики степени зависимости отклонения регулируе- |
||||||||
мой величины от нагрузки в теории регулирования пользуются поня- |
||||||||
тием неравномерности, или статизма регулирования. |
|
|||||||
Пусть график зависимости установившихся значений регулируе- |
||||||||
мой величины x от нагрузки q (характеристика регулирования) имеет |
||||||||
вид, изображенный на рисунке 1.6, б (характеристика регулирования |
||||||||
дана в конкретных координатах для регулятора уровня воды в баке; |
||||||||
ниже координаты приводятся в общем виде, для любых статических |
||||||||
регуляторов). Максимальное значение регулируемой величины хmax |
||||||||
соответствует холостому ходу объекта (нагрузка отсутствует); мини- |
||||||||
мальное значение x |
min |
— номинальной нагрузке — qном. |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
б) |
|
|
|
|
|
|
|
|
H |
|
|
1 |
• |
• |
• |
|
|
Hmax |
|
|
|
|
|
|
|
|
|
|
|
q1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
Hmin |
|
|
|
|
|
|
|
q |
0 |
qном |
q |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
Рис. 1.6 — Статический регулятор уровня воды прямого действия: |
||||||||
|
а — схема регулятора, б — характеристика регулятора; |
|||||||
|
|
|
|
|
1 — задвижка, 2 — поплавок |
|
|
|
Для определения статизма регулирования воспользуемся относительными координатами: