Материал: 2015 [Тынчеров] Основы автоматизации ТПНП
Фотоэлектрические датчики скорости вращения регистри-
руют изменение светового потока, связанное с изменением положения в пространстве каких-либо движущихся частей механизмов и машин.
В качестве датчика скорости вращения применяется фотоэлектрический датчик с прерывателем.
Устройство фотоэлектрического датчика с прерывателем: фотосопротивление, диск с калиброванными отверстиями, который насаживается на вал измеряемого объекта. Фотосопротивление подключается последовательно с сопротивлением к источнику постоянного напряжения.
Принцип действия. Освещенность рабочей поверхности фотосопротивления прерывается диском с отверстиями (прорезями). Если фотосопротивление не освещено, по нему течет темновой ток IT. В случае освещенности фотосопротивления по нему течет световой ток
IC.
Так как проводимость фотосопротивления при облучении его световым потоком F растет, то его световое сопротивление RC становится меньше темнового сопротивления RТ.
При вращении диска освещенность фотосопротивления модулируется, и в его цепи течет пульсирующий ток. Таким образом, ток, проходящий через фотосопротивление, является функцией светового потока F. Частота пульсаций тока определяется числом отверстий в диске и его скоростью вращения:
FД = n/60·S, (3.12)
где n — скорость вращения диска, об/мин; S — число отверстий в диске.
Достоинства: универсальность, простота конструкции, широкий рабочий диапазон измеряемой синхронной частоты, малая нагрузка на вал испытываемого объекта, возможность простого промежуточного преобразования частоты обычных серийных датчиков.
Емкостные датчики скорости вращения используются для преобразования механических перемещений в изменение емкости.
Устройство: конденсатор переменной емкости C с воздушным диэлектриком, маломощный трансформатор, с вторичной обмотки которого
снимается сигнал, напряжение которого пропорционально скорости вращения. Емкостные датчики питаются переменным напряжением (обычно повышенной частоты — до десятков мегагерц). В качестве измерительных схем обычно применяют мостовые схемы и схемы с использованием резонансных контуров. В последнем случае, как правило, используют зависимость частоты колебаний генератора от емкости резонансного контура, т. е. датчик имеет частотный выход.
Принцип действия датчиков этого типа основан на изменении зарядного тока конденсатора пропорционально скорости изменения его емкости.
То есть вспомним принцип определения емкости конденсатора. Выражается это действие при помощи следующей формулы:
С = eεₒS/δ, |
(3.13) |
где S — площадь конденсаторной пластины;
e — относительная проницаемость диэлектрического материала, использованного в конструкции конденсатора;
εₒ — диэлектрическая проницаемость вакуума; δ — толщина пластины диэлектрика, или же расстояние между не-
сколькими слоями материала.
Таким образом, из приведенной формулы следует, что изменить емкость конденсатора легко. Достаточно как-то подействовать на площадь пластины диэлектрического материала, на расстояние между пластинами или непосредственно на проницаемость использованного при производстве материала. Соответственно, выбор конкретной величины зависит исключительно от перечня задач, которые конструкторы поставили перед прибором. Таким образом, можно даже сделать емкостной датчик своими руками, так как с конструктивной точки зрения это обычный плоский или цилиндрический конденсатор, одна из пластин которого постоянно испытывает контролируемое перемещение в пространстве, что приводит к изменению емкости. Следует помнить, что приведенная выше формула верна только в том случае, если вы полностью пренебрегаете краевыми эффектами. Следует знать, что такого рода электронные приборы интенсивно используются для измерения угловых и линейных перемещений предметов, вычисления размеров, прикладываемой работы, влажности, концентрации действующего вещества и прочих характеристик.

Что касается конструктивной стороны вопроса, то упомянутые КИПы изготавливают плоскопараллельными, в цилиндрических корпусах, со штыревыми электродами, с прокладкой из диэлектрического материала и вовсе без него [14].
Достоинства: простота, высокая чувствительность и малая инерционность.
Недостатки: влияние внешних электрических полей, относительная сложность измерительных устройств.
Ультразвуковые датчики скорости враще-
ния применяются для измерения скорости вращения деталей, установленных в труднодоступных местах или для измерения в агрессивных средах.
Устройство. Датчик состоит из генератора ультразвуковых колебаний, излучающей головки, вертушки, вращающейся в трубопроводе, принимающей головки и демодулятора.
Принцип действия основан на различном поглощении или отражении ультразвуковых колебаний разнородными средами. При вращении металлической вертушки за счет различной проводящей способности жидкости и металла несущая частота ультразвуковых колебаний модулируется частотой вращения вертушки. С приемной головки сигнал поступает на измерительную аппаратуру. После демодуляции сигнала получается напряжение с частотой, пропорциональной скорости вращения вертушки.
Достоинства: высокая точность измерения.
Недостатки: шум, вибрация, производимые при движении излучателя, а также низкое разрешение.
Магниторезистивные датчики скорости вращения преобра-
зуют измеряемую неэлектрическую величину в изменение сопротивления ферромагнитных материалов.
Устройство. Датчик состоит из измерительной катушки, которая снабжается магнитным сердечником. Катушка помещена перед диском или перед вращающимся ферромагнитным телом (рис. 3.23).
Принцип действия основан на магниторезистивном эффекте. Этот эффект заключается в том, что некоторые ферромагнитные материалы изменяют свое электрическое сопротивление при воздействии магнитного поля. Степень этого изменения зависит от величины напряженности магнитного поля и угла между вектором напряженности и направлением тока. На магнитный сердечник катушки
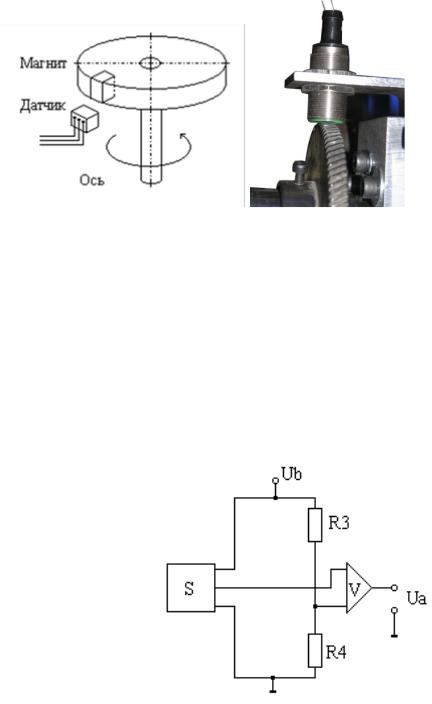
воздействует поток индукции постоянного магнита. Последовательность скачков магнитных свойств диска или вращающегося тела вызывает периодическое изменение магнитного сопротивления в магнитной цепи катушки, которое наводит в ней ЭДС с частотой, пропорциональной скорости вращения.
Магнит, установленный на оси вращения, при каждом обороте проходит один раз мимо магниторезистивного датчика, вызывая изменение его сопротивления (рис. 3.23).
Рис. 3.23 — Схема реализации магниторезистивного датчика вращения
Изменение сопротивления с помощью схемы, показанной на рисунке 3.24, преобразуется в изменение напряжения Uа. Зависимость выходного напряжения сигнала от времени показана на рисунке 3.25.
Достоинства: простота устройства, надежность, дешевизна. Благодаря своим достоинствам микроэлектронные магниторези-
стивные датчики скорости вращения нашли широкое применение в автомобильной и бытовой технике.
Рис. 3.24 — Схема изменения сопротивления
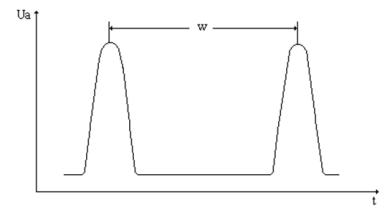
Рис. 3.25 — Зависимость выходного напряжения сигнала от времени