Материал: 2015 [Тынчеров] Основы автоматизации ТПНП
2. Метод сравнения числа оборотов — основан на сравнении при помощи измерительных средств числа оборотов испытываемого вала с известной частотой какого-либо независимого периодического процесса.
Прибор для измерения угловых скоростей в технике называется тахометром. Обычно при помощи тахометров измеряют среднюю скорость вращения, постоянную в заданном промежутке времени.
Тахометры представляют собой современные модули автоматики и могут применяться в системах управления автоматическими линиями, станками и т. д.
Принцип работы тахометров. С помощью кнопок на лицевой панели задается установка количества импульсов датчика на оборот вала, которая высвечивается на индикаторе и запоминается в энергонезависимой памяти. Ввод установки аналогичен вводу у счетчиков. На вход тахометра поступают импульсы с датчика (индуктивного/оптического или другого выключателя), контролирующего одну или несколько меток на валу. По частоте следования импульсов производится вычисление частоты вращения вала (обороты в минуту) и выдача значения на индикатор.
Классификация датчиков скорости вращения
1.По способу воспроизведения показаний:
• приборы с непосредственным отсчетом,
• самопишущие.
2.По принципу конструктивного выполнения:
• механические,
• электрические.
Различают следующие механические тахометры:
• центробежные,
• часовые,
• дифференциальные,
• вибрационные,
• фрикционные,
• гидравлические,
• пневматические,
• суммирующие и др.
Современные электрические методы измерения скоростей вра-
щения можно разделить на две основные группы:
1. Приборы, измеряющие напряжение датчика, пропорциональное измеряемым скоростям, U = f(n);
2. Приборы, измеряющие частоту переменного тока датчика, пропорциональную измеряемой угловой скорости вращения, F = f(n).
Индукционные датчики скорости вращения преобразуют из-
меряемую неэлектрическую величину в ЭДС индукции. Принцип действия основан на использовании закона электромагнитной индукции. Согласно закону Фарадея, индуцированное напряжение или электродвижущая сила (ЭДС) в контуре численно равна и противоположна по знаку скорости изменения магнитного потока сквозь поверхность, ограниченную этим контуром, т. е.
e = –dφ/dt. (3.1)
Следовательно, магнитный поток, пересекающий контур, описывается функцией вида:
φ(x) = φ0F(x), |
(3.2) |
где x — переменная углового положения.
Отсюда видно, что относительное перемещение между источником потока и контуром наводит в последнем ЭДС, амплитуда которой пропорциональна скорости перемещения, вследствие чего на выходе датчика формируется сигнал:
e = – φ0(F(x)/dx)∙(dx/dt). |
(3.3) |
В качестве датчиков скорости вращения обычно применяют тахогенераторы, выполненные в виде небольших генераторов постоянного или переменного тока с независимым возбуждением от постоянного магнита.
Тахогенераторы постоянного тока. В зависимости от способа возбуждения выполняют двух типов: магнитоэлектрические (возбуждаемые от постоянных магнитов) и электромагнитные (возбуждаемые от специальной обмотки) (рис. 3.20, а, б).
Напряжение на выходе тахогенератора при постоянном потоке
возбуждения: |
|
Uвых = Е – IRя = Сеω – IRя, |
(3.4) |
где Се = (Uя – IяRя)/ω — постоянная машины, определяется из паспортных данных.
На холостом ходу (I = 0) напряжение Uвых = Е = Сеω. Следовательно, статическая характеристика тахогенератора
Uвых= f (ω) при холостом ходе линейна, так как Се = const (прямая I,
рис. 3.20, в).
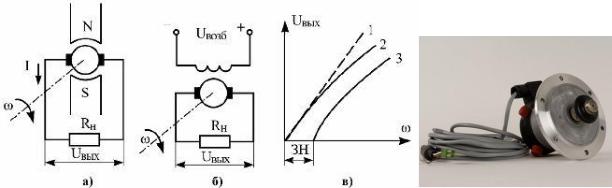
Рис. 3.20 — Датчики частоты вращения (тахометрические генераторы постоянного тока):
а) с возбуждением от постоянных магнитов, б) с электромагнитным возбуждением, в) статическая характеристика
При нагрузке статическая характеристика становится нелинейной (кривая 2), изменяется ее наклон, что является следствием реакции якоря и падения напряжения в обмотке якоря тахогенератора. В реальных тахогенераторах возникает падение напряжения на щетках, что приводит к появлению зоны нечувствительности (кривая 3).
Для уменьшения искажения статических характеристик тахогенераторы используют при небольших нагрузках (Iн = 0,01 – 0,02 А). Ток в цепи якоря:
Iя = Е/(Rя + Rн),
а выходное напряжение:
Uвых = Е – IRя = Сеω – IRя.
Тахогенераторы постоянного тока широко применяются в автоматических системах регулирования электроприводов в качестве датчиков частоты вращения. Их достоинство — малая инерционность, высокая точность, малые габариты и масса, а достоинством магнитоэлектрических тахогенераторов является также отсутствие источника питания. Недостаток — наличие коллектора со щетками.
Тахогенераторы переменного тока. Различают:
•синхронные тахогенераторы,
•асинхронные тахогенераторы.
Синхронные тахогенераторы — однофазная синхронная маши-
на с ротором в виде постоянного магнита (рис. 3.21, а), У синхронных тахогенераторов с изменением угловой скорости вместе с амплитудой изменяется и частота выходного напряжения. Статические характеристики нелинейны. В динамическом отношении синхронные тахогенераторы являются безинерционными элементами.
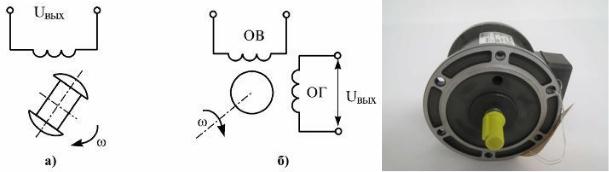
Асинхронный тахогенератор — это двухфазная асинхронная машина с полым немагнитным ротором (рис. 3.21, б). На статоре асинхронного тахогенератора размещаются две сдвинутые на 90° обмотки (возбуждения ОВ и генератора ОГ). Обмотка ОВ подключается к источнику переменного тока.
Рис. 3.21 — Тахомерические генераторы переменного тока: а) — синхронный, б) — асинхронный
В обмотке OГ, являющейся выходной, при вращении ротора наводятся ЭДС трансформации и вращения. Под действием ЭДС вращения на выходе тахогенератора возникает напряжение Uвых.
Статическая характеристика асинхронного тахогенератора также нелинейна. При изменении вращения ротора фаза выходного напряжения изменяется на 180°.
Асинхронные тахогенераторы используют как датчики угловой скорости, частоты вращения и ускорений. В последнем случае обмотка возбуждения асинхронного тахогенератора подключается к источнику постоянного тока.
Достоинства асинхронных тахогенераторов — надежность, малая инерционность. Недостатки — наличие на выходе остаточной ЭДС при неподвижном роторе, относительно большие габариты.
Тахометрические мосты. Тахометрические мосты постоянного и переменного тока применяют в системах автоматики для создания обратной связи по частоте вращения электрических двигателей. Это позволяет упростить систему, так как отпадает необходимость в дополнительной электрической машине — тахогенераторе. При этом уменьшаются статические и динамические нагрузки на исполнительный двигатель.
Тахометрический мост постоянного тока представляет собой специальную мостовую схему (рис. 3.22, а), в одно из плеч которой включен якорь двигателя Rя, а в другие — резисторы R1, R2, Rn. К диа-
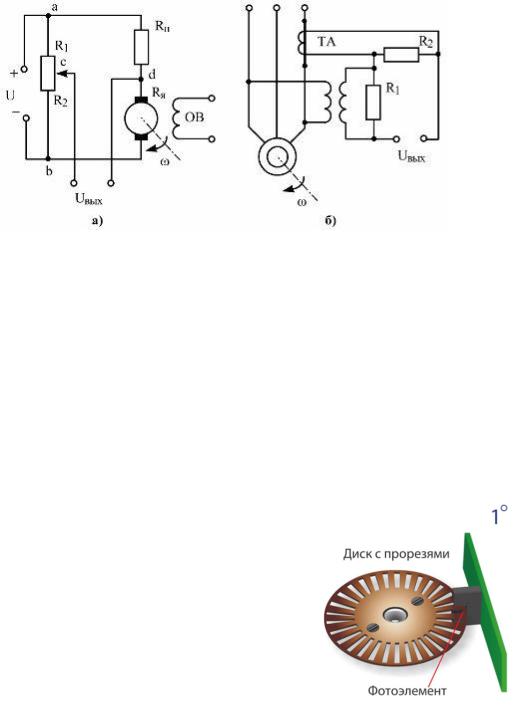
гонали аb моста подводится напряжение сети U, питающее якорь двигателя, а с диагонали cd снимается напряжение Uвых, пропорциональное угловой скорости ω.
Если ток в выходной цепи отсутствует, то |
|
|||||
|
|
= |
− ; |
(3.5) |
||
|
вых |
|
|
|
|
|
|
|
= ; |
|
(3.6) |
||
|
|
|
я |
|
|
|
|
|
= |
1 |
; |
(3.7) |
|
|
|
|||||
|
|
|
(1+ 2) |
|
|
|
|
|
|
|
|
||
|
= (U− )/( |
+ ); |
(3.8) |
|||
я |
|
|
|
я |
|
|
|
= . |
|
(3.9) |
|||
|
|
|
|
|
|
|
Рис. 3.22 — Тахометрический мост постоянного тока (а)
и бесконтактное измерительное устройство частоты вращения асинхронного двигателя (б)
Решая совместную систему уравнений, получим:
|
|
|
|
|
|
|
|
|
||
|
= [ |
|
1 |
− /( |
+ )] + |
|
|
. |
(3.10) |
|
|
+ |
+ |
||||||||
вых |
|
я |
|
|
|
|||||
|
|
1 |
2 |
|
|
я |
|
|
|
|
Напряжение на выходе тахометрического моста
|
= ( |
|
)/( |
+ ) = |
ТМ |
, |
(3.11) |
вых |
|
|
я |
|
|
|
где kтм — коэффициент передачи тахометрического моста. Погрешность тахометрического моста
составляет ±(2–5)%. В динамическом отношении тахометрические мосты постоянного тока являются безынерционным звеном.
Для контроля частоты вращения ротора асинхронного электродвигателя применяют бесконтактное измерительное устройство (рис. 3.22, б), содержащее измерительный трансформатор тока ТА и напряжения TV.