Материал: 2015 [Тынчеров] Основы автоматизации ТПНП
Глава 4. МЕТОДЫ И СРЕДСТВА ИЗМЕРЕНИЯ ОСНОВНЫХ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ
4.1. Методы электрических измерений
Существующие методы электрических измерений можно в основном разделить на два класса: непосредственной оценки и сравнения.
При непосредственной оценке измерительная схема выполняет лишь функции преобразования выходного сигнала датчика, например, усиливает его или согласует выходное сопротивление датчика с входным сопротивлением прибора. Этот метод прост, но применяется редко, так как ему свойственны значительные погрешности (особенно при изменении напряжения питания датчика).
Метод сравнения обеспечивает более высокие точность и чувствительность. При этом используются:
мостовые,
дифференциальные,
компенсационные схемы измерения.
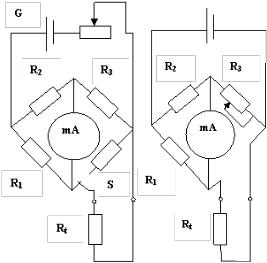
Мостовые измерительные схемы применяют постоянного и переменного тока. Существуют мостовые схемы уравновешенные и неуравновешенные. Уравновешенные мосты требуют ручной или автоматической балансировки, в то время как неуравновешенные мосты балансировки не требуют. Уравновешенный мост представляет собой схему (рис. 4.1, а), состоящую из ромба, образуемого четырьмя сопротивлениями R1, R2, R3, Rt. Резисторы в схеме называют ветвями или плечами моста. Помимо этого в мостовую схему включены источник тока со своим сопротивлением RE и измерительный прибор с сопротивлением Rnp. В четырехугольнике также есть две диагонали, в одну из которых включен миллиамперметр, а в другую — источник тока. Для подстройки моста одно плечо (R3) является переменным сопротивлением.
а) |
б) |
Рис. 4.1 — Мостовые измерительные схемы: а) уравновешенная; б) неуравновешенная
Закон уравновешенного моста: произведения сопротивлений противолежащих плеч должны быть равны.
R1/R2 = R3/Rt или R1·Rt = R2·R3. |
(4.1) |
Если необходимо вычислить неизвестное сопротивление датчика, то можно включить его в одно из плеч моста вместо резистора R4
и воспользоваться формулой: |
|
Rt = R2·R3/R1. |
(4.2) |
Ток в диагонали моста, содержащей измерительный прибор, че- |
|
рез напряжение питания: |
|
Inp = U(R1Rt–R2R3)/M. |
(4.3) |
Основной характеристикой любой схемы является ее чувствительность. Она определяется как отношение приращения тока в измерительной диагонали ∆Inp к вызвавшему его изменению сопротивления одного из плеч моста:
Sсх = ∆Inp /∆R, |
(4.4) |
∆Inp = U∆RRt/M , |
(4.5) |
— результирующий ток в диагонали моста, содержащей измерительный прибор, A; U — напряжение питания, В; М — входное напряжение, В.
Неуравновешенный мост представляет собой схему (рис. 4.1, б), состоящую из ромба, образуемого четырьмя сопротивлениями R1, R2, R3, R5, Rt. Помимо этого, в мостовую схему включены источник тока со своим сопротивлением RE и измерительный прибор с сопротивлением Rnp. Для подстройки моста одно плечо (R5) является переменным сопротивлением.
В качестве измерительного прибора в неуравновешенных мостах используются амперметры (так как токи невелики, то обычно мили- и микроамперметры). Неуравновешенный мост подчиняется тем же законам, что и уравновешенный.
Компенсационные схемы используют для измерения неэлектрических величин, которые преобразуются датчиками в ЭДС или напряжение. Сигнал датчика сравнивается с компенсирующим напряжением, вырабатываемым потенциометром. Подбор компенсирующего напряжения выполняется вручную или автоматически.
Компенсационная схема с ручным уравновешиванием представлена на рисунке 4.2, а. Измеряемая ЭДС Ех или напряжение Uх уравновешивается напряжением Uк, снимаемым с резистора Rк, представляющего собой часть резистора R. Все сопротивление резистора R включено в цепь источника питания с ЭДС Е. Схема состоит из двух прямоугольников. В нижней части находится датчик, имеющий сопротивление Rд. Резисторы в схеме называют ветвями или плечами моста. В состав схемы включен прибор, называемый нуль-индика- тором (НИ), который служит для определения нулевого значения тока после компенсации.
Для поддержания стабильного тока питания I можно использовать регулировочный резистор Rрег и миллиамперметр или применить источник стабилизированного напряжения как в автоматическом потенциометре (рис. 4.2, б).
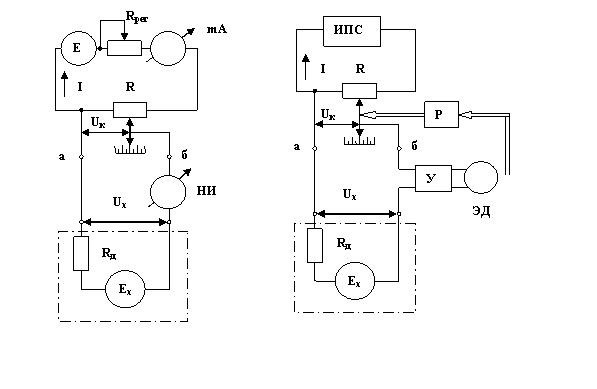
Рис. 4.2 — Компенсационные измерительные схемы: а — с ручным уравновешиванием, б — с автоматическим уравновешиванием
Ток прибора: |
|
Iпр = (Uх – Uк )/(Rд + Rк + Rпр ), |
(4.6) |
где Rд — сопротивление датчика, Rк — сопротивление резистора, Rпр
— сопротивление прибора, Uк — компенсирующее напряжение, Uх — измеряемое напряжение.
Чувствительность компенсационной схемы можно определить как отношение приращение тока через прибор к вызывающему его
изменению измеряемого напряжения: |
|
Sсх = ∆Inp /∆Uх |
(4.7) |
∆Inp = ∆Uх/(Rаб+Rпр+Rд), |
(4.8) |
Rаб — внутреннее сопротивление электрической цепи питания, |
|
Rаб = ((Rк(R–Rк+Rрег))/(Rк+Rрег). |
(4.9) |
Компенсационный метод измерения применяется в цепях как постоянного, так и переменного тока.
Дифференциальная схема — это гибрид мостовой и компенсационной схем. Состоит из двух смежных контуров с источником питания, а измерительный прибор включен в общую ветвь контуров и реагирует на разность контурных токов. В дифференциальной схеме
могут быть использованы параметрические (с изменяющимся сопротивлением) и генераторные (с изменяющейся ЭДС) датчики.
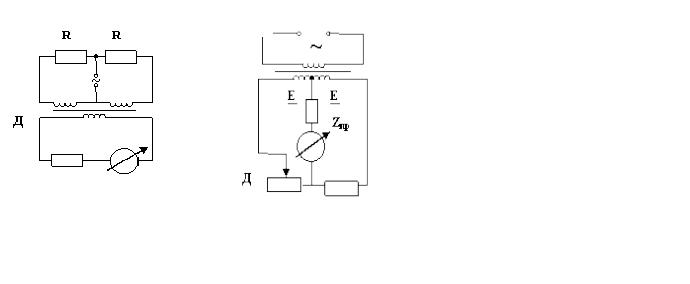
Дифференциальная схема включения параметрических датчиков показана на рисунке 4.3, а (датчик включен в один контур). Дифференциальная схема включения генераторного датчика показана на рисунке 4.3, б. В этой схеме датчиком является так называемый дифференциальный трансформатор.
Для расчета токов в дифференциальной схеме используют метод наложения: сначала определяют токи от одной ЭДС, а затем от другой.
а) |
б) |
|
Рис. 4.3 — Дифференциальная схема включения датчиков: а) параметрических б) генераторных
Изменение тока через прибор будет рассчитываться:
∆ |
= , |
− ,, |
= |
|
∙ |
+ ∆ |
|
− |
|
|
|
|
|
|
пр |
+ |
( + ∆ )/( |
+ + ∆ ) |
|||||||
пр |
пр |
пр |
|
|
|
|
||||||
|
|
|
|
пр |
|
+ ∆ + |
|
|
|
пр |
пр |
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
пр |
|
|
|
|
|
(4.10)
где пр, — ток через прибор при включении параметрических датчиков в один контур;
пр,, — ток через прибор при включении параметрических датчиков в оба контура.
4.2. Методы и средства измерения температуры
Одним из параметров, наиболее часто подлежащих контролю и регулированию для корректного протекания технологического процесса, является температура. Температурой называют величину, характеризующую степень нагретости вещества. Это понятие связано