Материал: 2015 [Тынчеров] Основы автоматизации ТПНП
Рис. 3.14 — Трансформация сигналов в магнитных датчиках силы
Изменение состояния сердечника приводит к изменению его магнитной проницаемости. Это обусловливает пропорциональное изменение магнитного сопротивления сердечника. В результате изменяется индуктивность катушки.
Таким образом, трансформация физического воздействия деформирующей силы в электрический сигнал (рис. 3.14, вариант 1) можно отобразить в виде последовательных превращений.
Более распространенными являются магнитные датчики силы с двумя обмотками. Первичная обмотка такого датчика запитана от генератора, во вторичной обмотке наводится ЭДС. При деформации сердечника изменяется магнитная проницаемость и связанная с ней взаимоиндуктивность (рис. 3.14, вариант 2). Конечным результатом действия силы является изменение ЭДС во вторичной обмотке датчика.
Тактильные датчики силы. Тактильные (осязательные) датчики являются самыми «молодыми». Их появление обусловлено развитием робототехники и автоматических поточных линий.
Существующая классификация рассматривает три типа тактильных датчиков: касания, усилия и проскальзывания. Первые два типа тактильных датчиков измеряют один и тот же параметр — действующую силу. Отличаются они только видом выходного сигнала. Датчики усилия имеют аналоговый выходной сигнал, а датчики касания
— выход релейного типа с регулируемыми уставками.
Реализуются тактильные датчики с использованием различных физических явлений, но принципиальным отличием от других датчиков является их небольшая толщина. Это достигается за счет использования специальных материалов. Они, как правило, обладают гибкостью, эластичностью и прочностью при хорошей электропроводности.
На рисунке 3.15 приведен пример реализации тактильного датчика, реагирующего на силовое воздействие.
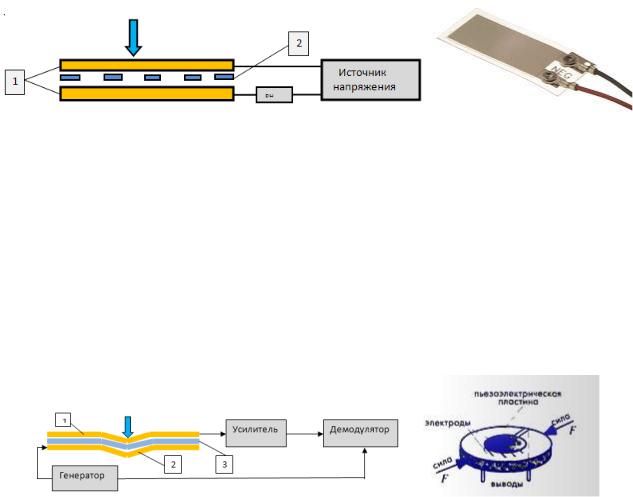
Рис. 3.15 — Пример простого тактильного датчика силы
Датчик представляет собой две тонких металлических пластины 1, между которыми расположена ячеистая прокладка 2 из изоляционного материала. Один полюс источника напряжения подключен к верхней пластине, второй — через нагрузочный резистор Rн к нижней пластине. Когда к верхней пластине в районе ячейки прикладывается внешняя сила, пластина, прогибаясь, замыкается с нижней. Через резистор протекает ток, а падение напряжения на нем служит выходным информационным сигналом.
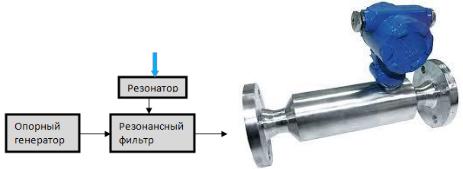
Рис. 3.16 — Пьезоэлектрический тактильный датчик силы
Тактильный датчик с использованием пьезоэлектрического эффекта приведен на рисунке 3.16.
Он представляет собой два параллельных слоя 1 и 2 пьезоэлектрических пленок, разграниченных акустически проницаемым слоем 3. К нижней пьезопленке подключен генератор, и при его работе она колеблется с генерируемой частотой. При этом такие же колебания возбуждаются в промежуточном слое и в верхней пьезопленке. На противоположных поверхностях последней возникает разность потенциалов. Напряжение с верхней пленки подается на усилитель и синхронный детектор, формирующий выходной сигнал с учетом амплитуды и фазы.
При воздействии на верхнюю пленку деформирующей силы характеристики всех слоев изменяются, что приводит к пропорциональному изменению выходного сигнала.
Пьезорезонансные датчики силы. В датчиках силы этого типа используются оба эффекта, свойственные пьезокристаллическим материалам: прямой и обратный пьезоэффекты.
Чувствительным элементом датчика является механический резонатор. Колебания резонатора, возбуждаемые напряжением питающего генератора (обратный пьезоэффект), обусловливают его напряженное состояние. В свою очередь такое состояние вызывает возникновение соответствующих зарядов на электродах пьезоэлемента (прямой пьезоэффект).
Результатом одновременного электрического возбуждения колебаний резонатора и снятия электрического сигнала является возникновение резонансных колебаний.
Рис. 3.17 — Схема датчика силы с резонансным фильтром
Известно несколько вариантов включения пьезорезонансных датчиков силы в измерительные схемы.
Всхемах с применением автогенераторов резонатор используется в задающих цепях. Деформация резонатора внешней силой изменяет частоту генератора пропорционально приложенному усилию.
Вдругом варианте такой же схемы внешнее воздействие вызывает изменение положения электродов относительно резонатора, что также приводит к изменению частоты.
На рисунке 3.17 приведена схема с использованием генератора опорной частоты и резонансного фильтра. Деформирующая сила, воздействуя на резонатор, приводит к изменению частотных настроек фильтра и пропорциональному изменению выходного напряжения.
Емкостные датчики силы. Емкостные датчики силы относятся
кпараметрическим. Конструктивно они представляют конденсатор, состоящий из двух параллельных пластин с зазором между ними.
Емкость такого конденсатора пропорциональна площади пластин, диэлектрической проницаемости материала зазора и обратно пропорциональна расстоянию между пластинами.
Изменение какого-либо из перечисленных параметров приводит к изменению емкости, которую можно измерить соответствующей аппаратурой. Это положение используется при построении емкостных датчиков силы.
Для удобства пользования величину емкости преобразовывают в легко измеряемую величину, например, в ток, напряжение или частоту. Для преобразования применяются мостовые, резонансные или другие электрические схемы.
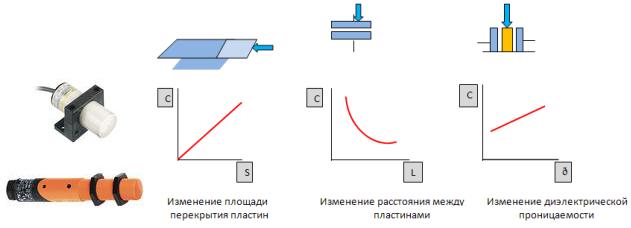
В зависимости от способа воздействия внешней силы на элементы датчика могут быть реализованы различные варианты емкостных датчиков силы (рис. 3.18).
Обычно в емкостных датчиках силы используют вариант с изменением диэлектрической проницаемости при сжатии диэлектрика. Конструктивно емкостной датчик состоит из корпуса с упругим элементом, через который усилие передается на диэлектрик.
Рис. 3.18 — Варианты реализации емкостных датчиков и графики зависимости емкости от величины действующей силы
Пьезоэлектрические датчики силы. Основой работы датчиков силы этого типа является прямой пьезоэффект, которым обладают некоторые материалы. К ним относятся природные кристаллы кварца и турмалина, искусственные кристаллы фосфата аммония и титаната бария.
Эти кристаллы обладают большим пьезоэффектом и высокой механической прочностью, химически устойчивы. Их пьезоэлектрические свойства незначительно изменяются в широком диапазоне температур. Геометрическая форма кристалла не влияет на свойства кристалла.
Суть пьезоэлектрического эффекта заключается в следующем. В момент действия силы на пластину из пьезоэлектрического материала на ее поверхностях возникают разноименные заряды. Их величина пропорциональна приложенной силе.
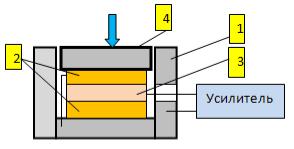
Конструктивно пьезоэлектрический датчик силы (рис. 3.19) состоит из корпуса 1, в котором установлены две пьезопластины 2 с расположенным между ними выводом 3. Вторым выводом служит корпус датчика. На его основании расположена нижняя пьезопластина.
В момент приложения силы на нажимное устройство 4 пьезоэлектрические пластины сжимаются и генерируют напряжение, которое поступает на вход усилителя.
Рис. 3.19 — Пьезоэлектрический датчик силы
Пьезоэлектрические датчики применяются для измерения динамически действующих сил.
3.3. Датчики скорости вращения
Датчики скорости вращения представляют собой так называемые частотные датчики. Их принцип действия состоит в преобразовании скорости вращения (углового перемещения) в частоту изменений потока энергии (электрического тока или напряжения). Скорость вращения в технике представляет собой число оборотов в единицу времени и носит название частоты вращения (измеряется в Гц).
Выходной сигнал датчика скорости вращения может быть представлен в виде синусоидального изменения величины (напряжения) или в виде последовательности коротких импульсов. Для использования в цифровых системах контроля последний вид сигнала более предпочтителен.
Два метода измерения угловых скоростей вращения:
1. Абсолютный метод — основан на определении числа оборотов вала и измерении соответствующего промежутка времени;