Материал: 2015 [Тынчеров] Основы автоматизации ТПНП
Оптические датчики перемещения. Существует множество вариаций схем датчиков перемещения, основанных на различных оптических эффектах. Пожалуй, наиболее популярной является схема оптической триангуляции — датчик положения является, по сути, дальномером, который определяет расстояние до интересующего объекта, фиксируя рассеянное поверхностью объекта излучение и определяя угол отражения, что дает возможность определить длину d
— расстояние до объекта (рис. 3.3). Важным достоинством большинства оптических датчиков является возможность производить бесконтактные измерения, кроме того такие датчики обычно довольно точны и имеют высокое быстродействие.
Рис. 3.3 — Оптический датчик перемещения на основе схемы оптической триангуляции
В другой реализации оптического датчика, предназначенной для регистрации и определения параметров малых перемещений и вибраций, используется двойная решетчатая конструкция, а также источник света и фотодетектор (рис. 3.4).
Одна решетка неподвижна, вторая подвижна и может быть механически закреплена на интересующем объекте или каким-либо способом передавать датчику его движение. Малое смещение подвижной решетки приводит к изменению интенсивности света, регистрируемой фотодетектором, причем с уменьшением периода решетки точность датчика возрастает, однако сужается его динамический диапазон.
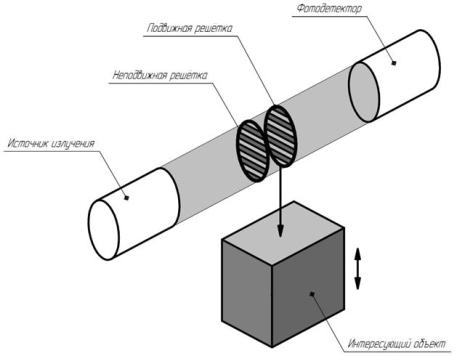
Рис. 3.4 — Оптический датчик перемещения на основе дифракционных решеток
Дополнительными возможностями применения обладают оптические датчики, учитывающие поляризацию света. В таких датчиках может быть реализован алгоритм селекции объектов по отражательным свойствам поверхности, т. е. датчик может «обращать внимание» только на объекты с хорошей отражающей способностью, прочие объекты игнорируются.
Чувствительность к поляризации негативно сказывается на стоимости подобных устройств.
Индуктивные датчики перемещения. В одной из конфигура-
ций датчика данного типа чувствительным элементом является трансформатор с подвижным сердечником. Перемещение внешнего объекта приводит к перемещению сердечника, что вызывает изменение потокосцепления между первичной и вторичной обмотками трансформатора (рис. 3.5). Поскольку амплитуда сигнала во вторичной обмотке зависит от потокосцепления, по величине амплитуды вторичной обмотки можно судить о положении сердечника, а значит, и о положении внешнего объекта.
Другая конфигурация имеет более простую схему, однако она пригодна лишь для небольшого количества приложений, где требуется определять незначительные перемещения или вибрации объектов,
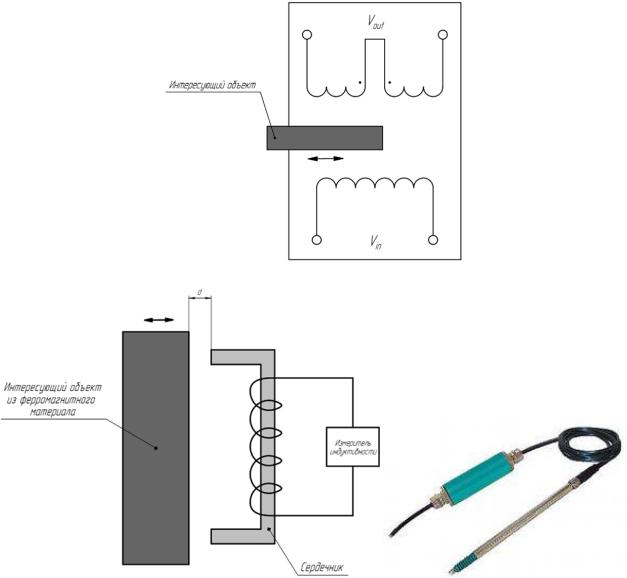
состоящих из ферромагнитного материала. В данной схеме интересующий ферромагнитный объект играет роль магнитопровода, положение которого влияет на индуктивность измерительной катушки
(рис. 3.6).
Рис. 3.5 — Индуктивный датчик перемещения на трансформаторе
Рис. 3.6 — Индуктивный датчик перемещения для объектов из ферромагнитных материалов
Вихретоковые датчики перемещения. Датчики данного типа содержат генератор магнитного поля и регистратор, с помощью которого определяется величина индукции вторичных магнитных полей. Вблизи интересующего объекта генератор создает магнитное поле, которое, пронизывая материал объекта, порождает в его объеме вихревые токи (токи Фуко), которые, в свою очередь, создают вторичное магнитное поле (рис. 3.7).
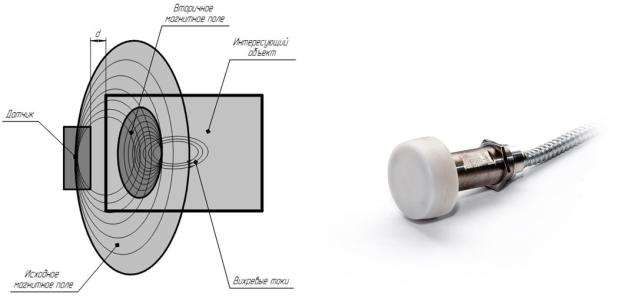
Параметры вторичного поля определяются регистратором, и на их основании вычисляется расстояние до объекта, так как чем объект ближе, тем больший магнитный поток будет пронизывать его объем, что усилит вихревые токи и индукцию вторичного магнитного поля. Подобный принцип используется в вихретоковых дефектоскопах, однако в них на параметры вторичного магнитного поля влияет не расстояние до объекта, а наличие в его внутренней структуре скрытых несовершенств.
Метод является бесконтактным, однако может применяться только для металлических тел.
Рис. 3.7 — Вихретоковый датчик перемещения
Ультразвуковые датчики перемещения. В ультразвуковых датчиках реализован принцип радара — фиксируются отраженные от объекта ультразвуковые волны, поэтому структурная схема обычно представлена источником ультразвуковых волн и регистратором (рис. 3.8), которые обычно заключены в компактный корпус. Определение временной задержки между моментами отправки и приема ультразвукового импульса позволяет измерять расстояние до объекта с точностью, доходящей до десятых долей миллиметра. Наряду с оптическими ультразвуковые датчики на сегодняшний день являются, пожалуй, наиболее универсальным и технологичным бесконтактным средством измерения. Использование этого принципа измерений опять же можно найти в детекторах обнаружения дефектов, только на этот раз уже в ультразвуковых дефектоскопах.
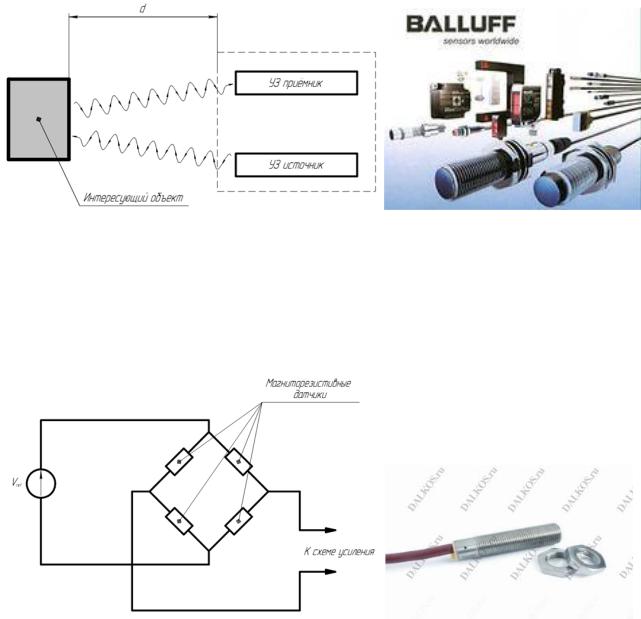
Рис. 3.8 — Ультразвуковой датчик перемещения
Магниторезистивные датчики перемещения. В магниторези-
стивных датчиках перемещения используется зависимость электрического сопротивления магниторезистивных пластинок от направления и величины индукции внешнего магнитного поля.
Рис. 3.9 — Магниторезистивный датчики перемещения Rechner серии MRS
Датчик, как правило, состоит из постоянного магнита и электрической схемы, содержащей включенные по мостовой схеме магниторезистивные пластинки и источник постоянного напряжения (рис. 3.9). Интересующий объект, состоящий из ферромагнитного материала, перемещаясь в магнитном поле, изменяет его конфигурацию, вследствие чего изменяется сопротивление пластинок, и мостовая схема регистрирует рассогласование, по величине которого можно судить о положении объекта.