Материал: 2015 [Тынчеров] Основы автоматизации ТПНП
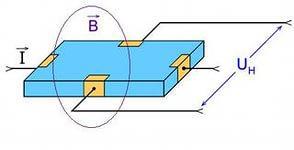
Датчики на основе эффекта Холла. Датчики этого типа имеют конструкцию, подобную конструкции магниторезистивных датчиков, однако в основу их работы положен эффект Холла — прохождение тока через проводник, на который воз-
действует внешнее магнитное поле, приводит к возникновению разности потенциалов в поперечном сечении проводника.
Таким образом, эффект Холла заключается в возникновении поперечной разности электрических потенциалов UН в проводнике с постоянным током I, находящимся под воздействием магнитного поля B. Этот эффект был обнаружен в 1879 году.
В отличие от трансформаторов тока датчики тока с элементом Холла измеряют как постоянный, так и переменный ток.
Магнитострикционные датчики перемещения. Как правило,
магнитострикционный датчик представляет собой протяженный канал — волновод, вдоль которого может свободно перемещаться постоянный кольцевой магнит. Внутри волновода содержится проводник, способный при подаче на него электрических импульсов создавать магнитное поле вдоль всей своей длины (рис. 3.10). Полученное магнитное поле складывается с полем постоянного магнита, и результирующее поле создает момент вращения канала, содержащего волновод (эффект Вайдемана). Импульсы вращения распространяются по каналу в обе стороны со скоростью звука материала канала. Регистрация временной задержки между отправкой электрического импульса и приема импульса вращения позволяет определить расстояние до постоянного магнита, т. е. определить его положение. Канал может иметь довольно большую длину (до нескольких метров), а положение магнита может быть определено с точностью до нескольких микрометров. Магнитострикционные датчики обладают отличной повторяемостью, разрешением, устойчивостью к неблагоприятным условиям и низкой чувствительностью к температурным изменениям.
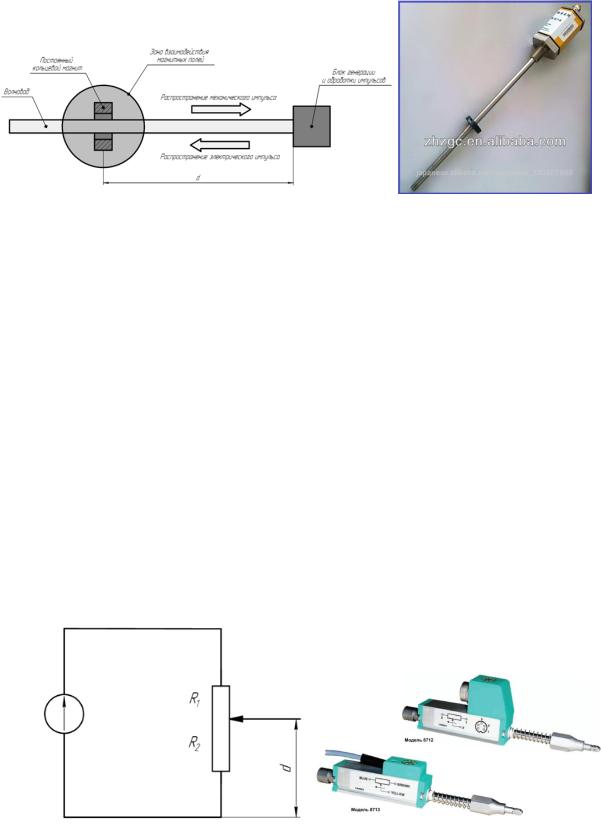
Рис. 3.10 — Магнитострикционный датчик перемещения
Потенциометрические датчики перемещения. Датчик данно-
го типа в своей основе имеет электрический контур, содержащий потенциометр (рис. 3.11). Линейное перемещение объекта приводит к изменению сопротивления потенциометра (переменного резистора). Если через потенциометр пропускать постоянный ток, то падение напряжения на нем будет пропорционально величине сопротивления и, следовательно, величине линейного перемещения интересующего объекта.
Наряду с механическими датчиками перемещения, потенциометрические датчики получили наиболее широкое распространение в силу своей простоты и низкой стоимости, однако для универсальных, прецизионных и бесконтактных измерений в последнее время все чаще используются датчики на основе оптических эффектов [32, 52].
Рис. 3.11 — Потенциометрический датчик перемещения
3.2. Датчики усилия
Принцип работы датчиков силы базируется на преобразовании усилий, приводящих к деформации чувствительного элемента, в электрический сигнал.
Процесс преобразования включает ряд последовательных операций. Они протекают на физическом и электрическом уровнях. На физическом уровне приложенная сила вызывает деформацию упругого элемента и закрепленного на нем тензодатчика. На электрическом уровне происходит преобразование величины деформации в аналоговый сигнал. В последующих операциях сигнал преобразуется в удобную для пользования форму.
Тензометрический датчик силы представляет собой гибкое тело, которое под влиянием действующей силы подвергается линейной деформации. На подходящих местах тела приклеены чувствительные элементы, так называемые тензометры.
Тензометр — это резистивный элемент, электрическое сопротивление которого вследствие механической деформации (растяжения или сжатия) изменяет свое значение. Действующая сила, таким образом, способствует изменению электрического сопротивления. На датчике обычно расположены четыре тензометра, которые включены в мостовую систему для того, чтобы изменение сопротивления было можно легче определить.
Тензометрические датчики силы (динамометры) являются неотъемлемым компонентом весоизмерительных систем. Они служат «поставщиком» исходных данных в системах автоматического учета и контроля экономической деятельности любого серьезного предприятия. Без них невозможно построение систем автоматизации технологическими процессами. Сфера их применения — металлургия, строительство, сельское хозяйство, нефтегазовое производство и т. д.
Работа тензометрических датчиков базируется на различных физических явлениях, позволивших создать следующие типы датчиков:
резистивные,
магнитные,
тактильные,
пьезорезонансные,
емкостные,
пьезоэлектрические.
Естественно, что разные физические явления для преобразования величины деформации в электрический сигнал используют различные чувствительные элементы. Ознакомимся с принципами их работы.
Резистивные датчики силы. Из предложенных к рассмотрению датчиков наиболее применяемыми (более 95%) являются резистивные датчики силы. Это обусловлено широким диапазоном воспринимаемых усилий (5Н — 5МН) и точностью измерения. Они могут использоваться при действии статических и динамических нагрузок. Существенным достоинством этого типа датчиков является линейность выходного сигнала.
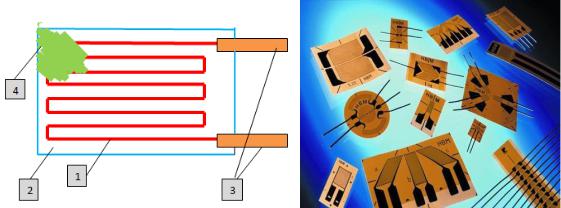
Чувствительным элементом датчика является тензорезистор (рис. 3.12). Датчик представляет собой тонкую проволоку 1, жестко закрепленную на гибкой подложке 2.
Рис. 3.12 — Проволочный тензорезистор:
1 — чувствительный элемент, 2 — подложка, 3 — выводы, 4 — защитная пленка
Концы проволоки снабжены выводами 3 для внешних подключений. Зигзагообразно уложенная проволока и места соединения ее с выводами закрыты защитной пленкой 4.
Тензорезистор подложкой приклеивается к упругому элементу, воспринимающему нагрузку. Последний под действием силы деформируется и вызывает деформацию тензорезистора. Изменение длины проволоки при действии сил растяжения или сжатия приводит к пропорциональному изменению величины ее сопротивления.
Связь между величиной деформации тела и действующей на него силой подчиняется закону Гука. Автор первоначально сформулировал его словами: «каково удлинение, такова и сила». В отношении
тензорезистивных датчиков, учитывая изложенное, этот закон можно интерпретировать так: «каково сопротивление, такова и сила».
Обычно тензорезисторы включаются в плечи чувствительных мостовых схем. В этом случае о действующей силе судят по напряжению в диагонали моста.
Магнитные датчики силы. Принцип работы магнитных датчиков силы базируется на явлении магнитострикции, точнее — на обратимости этого явления. Магнитострикционный эффект (изменение геометрических размеров) наблюдается при нахождении тела в магнитном поле. Обратимость обозначает, что принудительное изменение геометрических размеров тела (деформация) обусловливает изменение его магнитных свойств. Это явление получило название магнитоупругого эффекта. Следует отметить, что при снятии деформирующей силы магнитные свойства тела принимают исходное значение.
На физическом уровне эти явления объясняются изменением положения атомов в кристаллической решетке при воздействии внешнего магнитного поля или прикладываемой силы.
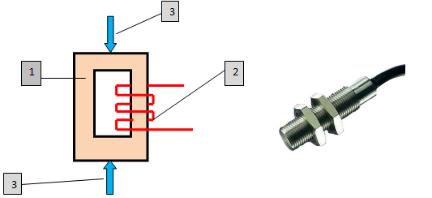
Простейший вариант конструкции магнитного датчика силы представлен на рисунке 3.13. На ферромагнитном сердечнике 1 размещена катушка индуктивности 2. В случае действия на сердечник силы 3 он деформируется и переходит в напряженное состояние.
Рис. 3.13 — Вариант конструкции магнитного датчика силы