Материал: 1697
В дальнейшем для улучшения проекта было принято решение заменить беспаечную макетную плату и заменить на более удобный и компактный аналог. Так как требовалось подключать питание каждого сервомотора к пи-
тании, возникала путаница, и образовывалось большое количество проводов,
что снижало удобство пользования и мобильность конструкции. Для решения данной проблемы была найдена и приобретена плата расширения Arduino Sensor Shield V5.0. Плата предназначена для подключения к ней различных устройств Ардуино или аналогов устройств через стандартные интерфейсы.
Для работы к плате нужно подключить Arduino контроллер или другое управляющее микропроцессорное устройство. И в завершении подать на плату питание или от Ардуино, или от внешнего источника питания и начи-
нать работу.
Управление платой расширения осуществляется или от Ардуино кон-
троллера, или другим микропроцессорным управляющим устройством. На плате расширения находится кнопка сброса параметров или перезагрузки
RESET. Когда на плату подается питание, должен загореться светодиод PWR.
На плате расширения Arduino Sensor Shield V5.0 расположено множество ин-
терфейсов для подключения различных внешних устройств и питания:
SD card interface (интерфейс для подключения карт памяти SD) – имеет
6 выводов, первый вывод обозначен на плате знаком «+». Обозначение выво-
дов: VCC, GND, D11, D10, D13, D12;
ultrasonic interface (интерфейс для подключения ультразвуковых датчи-
ков) имеет 4 вывода, первый вывод обозначен на плате знаком «+». Обозна-
чение выводов: VCC, A0, A1, GND;
интерфейс для подключения внешнего источника питания (блока пита-
ния, батареи). Обозначение выводов: GND, VCC;
колодка питания Arduino, обозначение выводов: RESET, 3V3, 5V, GND,
VIN;
установлено шесть аналоговых входов обозначенных: 0, 1, 2, 3, 4, 5;
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
41 |
|
Изм. Лист № докум. Подпись Дата |
|||
|
analog IO ports (интерфейс аналоговых входов-выходов) имеет 6 выво-
дов, обозначение выводов: A0, A1, A2, A3, A4, A5. Каждый вход-выход име-
ет 3 контакта GND, VCC, Signal;
интерфейс RS232 (последовательная шина COM), имеет 4 вывода обо-
значение выводов: Tx, Rx, «-», «+»;
ACP220 wireless module interface (интерфейс для подключения внешне-
го Wi-Fi модуля ACP220). Имеет 6 входов, обозначение входов: GND, VCC,
не задействован, D1, D0, не задействован;
bluetooth interface (интерфейс для подключения внешнего устройства
Bluetooth) имеет 6 выводов. Обозначение выводов: VCC, GND, D1, D0, GND, 3V3.
Большое количество портов позволяет в дальнейшем расширять проект и удобно подключать периферийные устройства. Так же в самой плате предусмотрено удобное подключение сервомоторов и различных датчиков.
Питание платы осуществляется как с Ардуино, так и от внешних источников питания. Переключение с источника питания Ардуино на внешний источник осуществляется с помощью перемычки SEL. Для питания платы нужно напряжение 5 В. Если не переключиться на внешний источник контроллер может выйти из строя.
За счет использования специальной платы расширения, которая уста-
навливается поверх платформ ардуино, общая конструкция устройства уменьшилась, что позволяет установить дополнительные платы для устройств ,которые требуют специальные драйверы, например шаговые мо-
торы.
Также появляется возможность установки различных модулей, которые будут подключен более компактно и универсально, к имеющимся вводам можно подключить WI-fi модуль, Bluetooth модуль и жидкокристаллический экран. На рисунке 10 изображен интерфейс платы.
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
42 |
|
Изм. Лист № докум. Подпись Дата |
|||
|
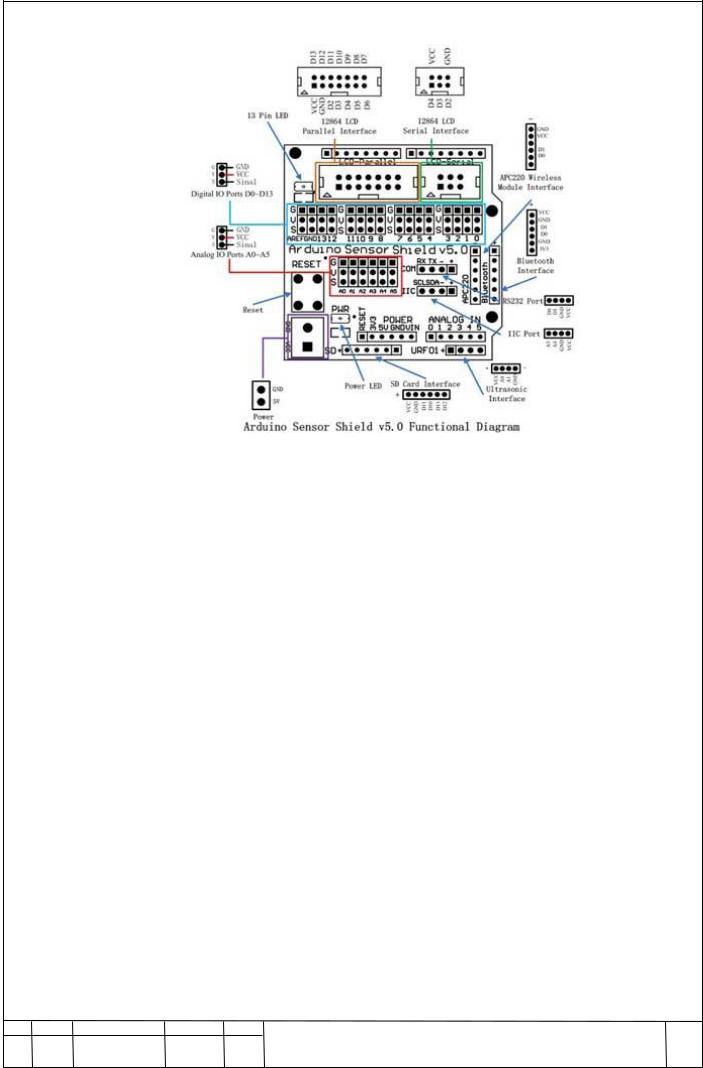
Рисунок 10 – Интерфейс платы расширения
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
43 |
|
Изм. Лист № докум. Подпись Дата |
|||
|
4 РАЗРАБОТКА И ИЗГОТОВЛЕНИЕ РОБОТИЗИРОВАННОЙ ПЛАТ-
ФОРМЫ
4.1 Проектирование манипулятора
Для разработки программного обеспечения, необходимо подобрать не-
обходимую конструкцию, для разработки более эффективного аппаратно программного комплекса. Для данного проекта предполагалась выбрать ма-
нипулятор, размеры которого будут меньше полуметра, и вес до 4 кило-
грамм, размер подобран в соответствии более удобной транспортировкой, и
оптимального занимаемого пространства. Так же выбираемый манипулятор должен иметь возможность смены некоторых узлов для возможности ремон-
та и увеличения рабочей области.
На данный момент распространены промышленные роботы, которые имеют довольно большой поднимаемый вес, и большую область охвата, и
хобби манипуляторы, которые имеют малый подъёмный вес, но довольно компактные и мобильны. Исходя из имеющихся характеристик и видов ма-
нипуляторов, был сделан выбор в сторону малогабаритных хобби манипуля-
торов с дальнейшей модификацией, так как промышленные манипуляторы хоть и имеют большой поднимаемый вес, но все же имеют большие габари-
ты, а так же большую стоимость В основе прототипа был использован манипулятор с шестью степенями
свободы. Основным критерием выбора манипулятора является его грузо-
подъёмность в горизонтальном состоянии. В конструкции используются специальные алюминиевые профили, которые намного облегчают конструк-
цию. Так же они имеют модульную структуру, благодаря которой имеется возможность удлинять конструкцию и расширять возможности прототипа.
Данная конструкция имеет специальные пазы для установки других сервомо-
торов стандартных форм.
Используемый манипулятор имеет оптимальный вес и рабочую об-
ласть, что так же положительно влияет на работоспособность всего проекта.
Так как в качестве корпуса используются алюминиевые модули, конструкция
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
44 |
|
Изм. Лист № докум. Подпись Дата |
|||
|
имеет малый вес и при движении манипулятора он может сместиться по инерции, что уменьшает точность и скорость выполнения операций. Для устранения данной проблемы бала установлена специальный железный про-
филь, на который устанавливается манипулятор, так же данное решение поз-
воляет увеличить рабочую область, и возможность скрытой установки неко-
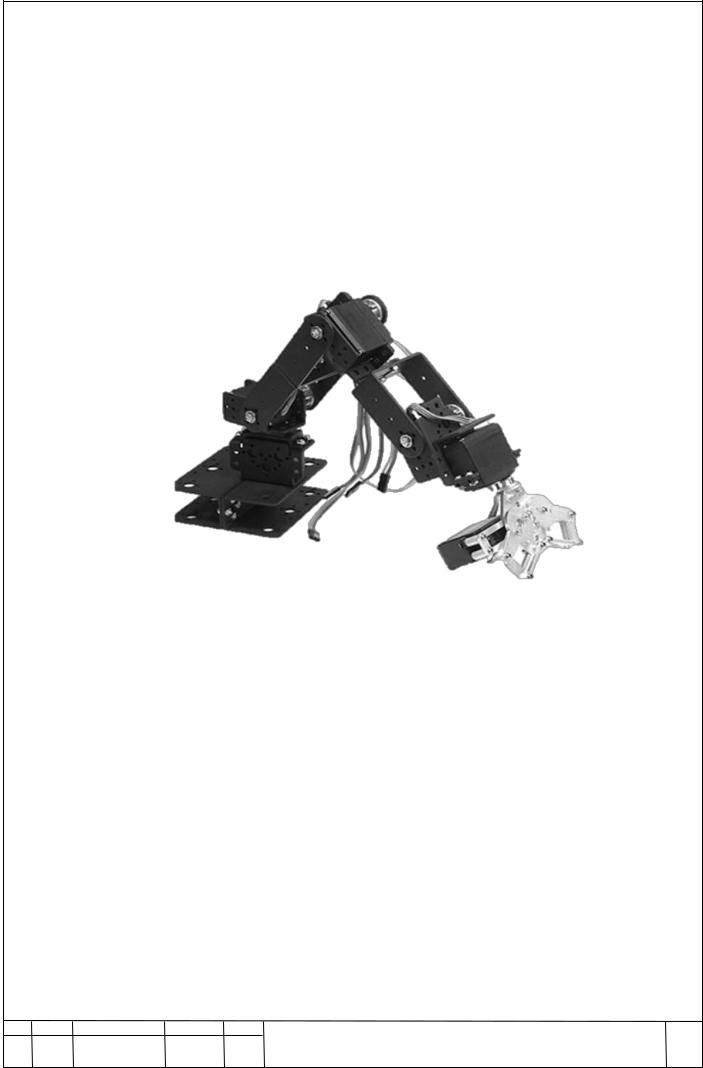
торых элементов аппаратно программного комплекса. На рисунке 11 изобра-
жён используемый манипулятор.
Рисунок 11 – Используемый манипулятор.
В исходном виде данный манипулятор не был способен поднимать хи-
мический дозатор, вес, которого составлял около 50 грамм, изначально дан-
ная проблема решалась программным методом и усложнением алгоритмов передвижения, но в дальнейшем было принято решение заменить все серво-
моторы на более мощные и точные. Таким образом, в основание манипуля-
тора используется сервомотор силой поднятия 33 кг/см с радиатором охла-
ждения и более точным потенциометром, так как изменение на пару градусов в основание дает большую погрешность, чем на конце конструкции. Осталь-
ные узлы так же были заменены, что позволило увеличить точность всей конструкции и отказоустойчивость.
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
45 |
|
Изм. Лист № докум. Подпись Дата |
|||
|