Материал: 1697
пользования имеется возможность редактировать, оставлять комментарии и сохранять написанные ранее алгоритмы.
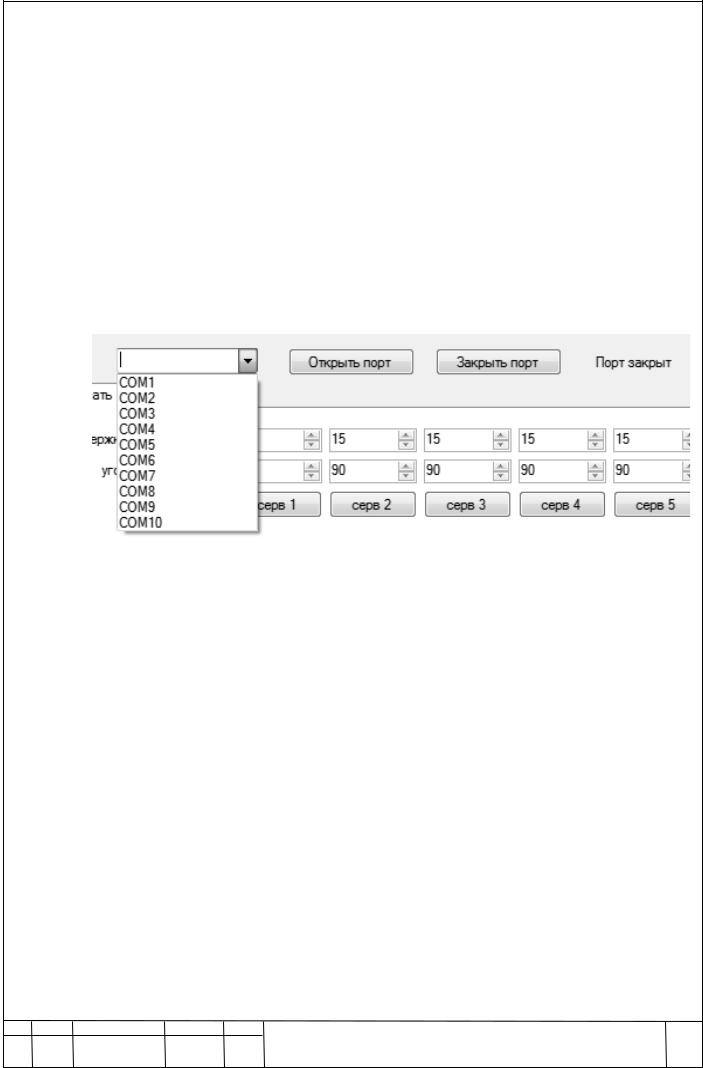
Для начала работы с приложением необходимо выбрать соответствую-
щий ком порт, в противном случае не будут выполнять необходимые коман-
ды. Так же имеется кнопка для закрытия порта. Эта функция необходима для стабильной работы. Если отключить аппаратный комплекс от компьютера происходит сбой на платформе ардуино, поэтому необходимо производить ручное отключение в программе. На рисунке 20 изображен процесс выбора необходимого порта.
Рисунок 20 – Выбор требуемого порта
Программа имеет несколько вкладок, где первая вкладка предназначена для создания собственных алгоритмов, а вторая вкладка непосредственно для воспроизведения ранее написанных.
В первой вкладке имеет блок для управления каждым сервомотором,
где имеется возможность задать необходимый угол поворота и задержку.
При нажатии на клавишу происходит формирование сигнала и выполнение движения.
Второй блок предназначен для управления дозатором. Имеется воз-
можность задать необходимый объём для забора, который будет набран на дозаторе автоматически путем набора требуемых нажатий. Так же имеется область для изменения начального значения объёма, исходя из которых, бу-
дет вычисляться необходимые операции. Данная функция необходима, так
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
66 |
|
Изм. Лист № докум. Подпись Дата |
|||
|
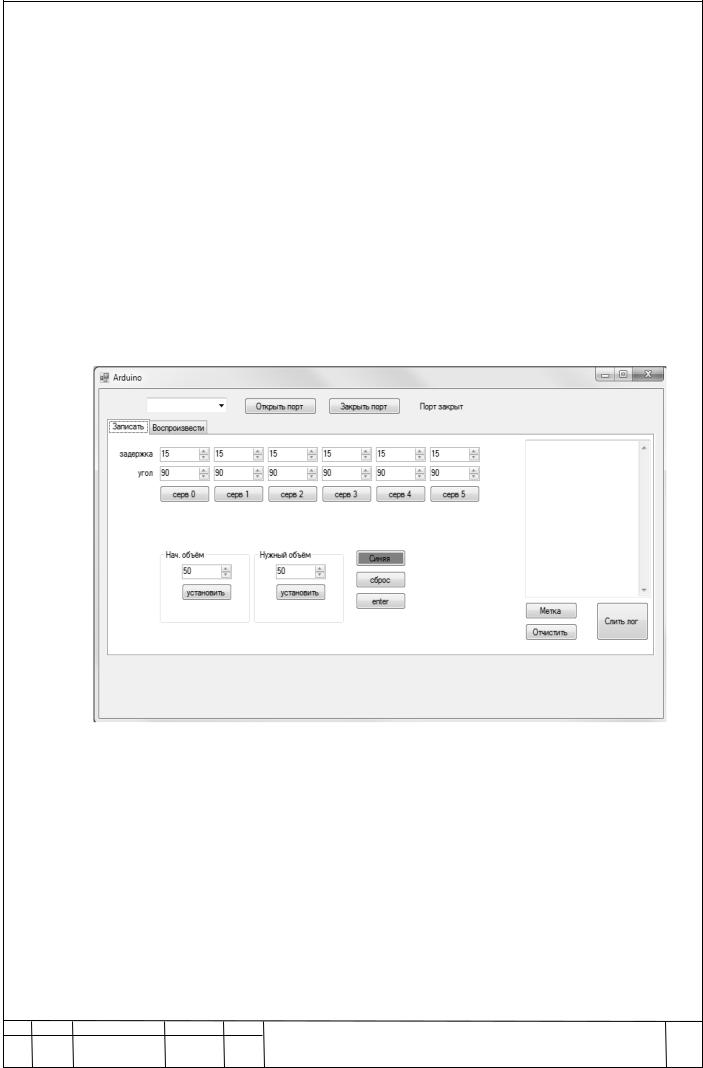
как иногда имеется возможность воспользоваться дозатором без микро-
контроллера, а так же заменить ранее используемый дозатор. Так же для удобства имеется дополнительные кнопки, благодаря которым можно изме-
нить некоторые параметры химического дозатора.
Третья область предназначена непосредственно для сохранения вы-
полненных алгоритмов, где имеется возможность редактирования каждой операции. Так же имеется кнопка для постановки метки, которая позволяет визуально разграничивать выполненные действия, при необходимости, воз-
можно, полностью отчистить рабочее окно. Интерфейс программ предостав-
лен на рисунке 21.
Рисунок 21 – Интерфейс программ для персонального компьютера.
Вторая вкладка имеет только одну кнопку, которая отвечает за воспро-
изведение написанных алгоритмов. Открывается ранее заданный файл и вос-
производит все операции, записанные в нем. Так же в данном окне имеется возможность изменить или скопировать все выполненные ранее операции.
Для воспроизведения другого алгоритма необходимо изменить содердимое исполняющего файла. На рисунке 22 показано содержание второй вкладки.
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
67 |
|
Изм. Лист № докум. Подпись Дата |
|||
|
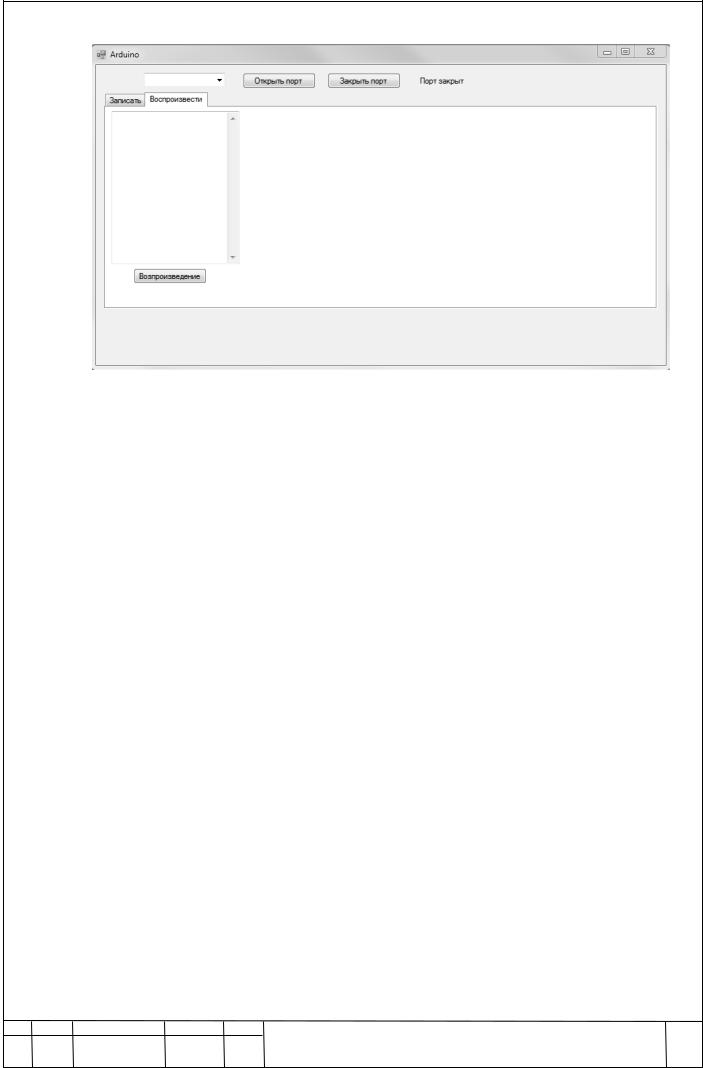
Рисунок 22 – Содержание вкладки «Воспроизвести» Программное обеспечение, используемое в микроконтроллере, распо-
знает несколько типов команд, что придает модульность конструкции и поз-
волит в дальнейшем расширить функционал, позволяя управлять другими устройствами.
В качестве основного устройства был использован манипулятор с ше-
стью степенями свобод, способный поднимать около пятидесяти грамм в вы-
тянутом состоянии. В дальнейшем была изменена конструкция, заменены серводвигатели на более мощные, что позволило увеличить вес поднятия до
150 грамм, а также было усиленно захватывающее устройство для более плотного захвата различных предметов.
Для переливания и дозирования жидкости использовался автоматиче-
ский дозатор, способный автоматически сбрасывать использованные пипет-
ки. Для управления данных устройством необходимо было заменить саму конструкцию. В результате модификации был удален встроенный аккумуля-
тор, выведен интерфейс подключения кнопок управления для дистанционно-
го взаимодействия, подключено отдельное питание и шина управления.
В результате выполненной работы был разработан химический мани-
пулятор, способный взаимодействовать с химическими элементами, а также производить забор, слив жидкости, сбрасывать использованные пипетки, от-
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
68 |
|
Изм. Лист № докум. Подпись Дата |
|||
|
крывать и закрывать химическую посуду, захватывать и ставить в исходное положение химический дозатор.
В качестве управляемого органа служит платформа Ардуино, благода-
ря которой производятся различные вычисления и управления другими устройствами. Так же было написано программное обеспечение для микро-
контроллера и персонального компьютера, для удобного управления кон-
струкции, создания алгоритмов и воспроизведение ранее написанных. В ка-
честве питания используется блок с достаточным запасом мощности для всей конструкции и возможностью ее расширения в будущем.
Так же предполагается улучшение проекта, разработкой нового мани-
пулятора способного двигаться с высокой точностью, и поднимать большой вес. Так же предполагается изготовить модульную систему для более точных или быстрых задач.
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
69 |
|
Изм. Лист № докум. Подпись Дата |
|||
|
ЗАКЛЮЧЕНИЕ
В результате изучения предметной области тематики химических роботизированных систем был сделан вывод о целесообразности данного проекта. В большинстве случаев разрабатываются системы, способные до-
зировать необходимое количество жидкости и переливать в другие сосуды.
Аналоги способные работать с химической посудой и взаимодействовать с используемым инвентарем не были найдены. При использовании манипу-
лятора в качестве основного объекта управления повышается его эффек-
тивность и функционал. Таким образом, появляется возможность создавать не только химические лаборатории, но и другие устройства, которые будут применяться в отраслях, которые требуют монотонное повторение одно-
типных действий.
Данное направление робототехники плохо развито, за счет того что манипулятор рассматриваются в основном как крупногабаритные проекты необходимые для работы в промышлености. В то время как в настоящее время появляется возможность создавать компактные, функциональные и точные манипуляторы, которые будет возможно применять в химических,
медицинских и других отраслях.
С применение новых технологий создавать роботов манипуляторов с большим количеством степей свобод не является проблемным и является достаточно новой веткой развития. Так же ранее основной проблемой раз-
вития ветки манипуляторов являлась дороговизна исследований и произ-
водства компонентов. Так как для создания манипулятора ранее необхо-
димо было полностью создавать собственные чертежи, рассчитывать раз-
мер, изготавливать печатные платы и создавать отдельно дополнительные модули. В настоящее время имеется возможность приобретения необходи-
мых компонентов, которые используются в смежных отраслях.
Данный проект является заказом лаборатории космического матери-
аловедения. Так как в данной отрасли часто приходится работать с различ-
ВКР. 155510.09.04.04.ПЗ
Изм. Лист № докум. |
Подпись Дата |
Лист
70