Материал: 1697
ВВЕДЕНИЕ
В настоящее время тема робототехники мало освещена, но, благодаря новым технологиям, появилась возможность создавать и изобретать различ-
ные роботизированные механизмы. Для этого не требуются специальные ла-
боратории и производственные станки. Благодаря развитию микроэлектро-
ники и электроники в целом появилась возможность приобретать и програм-
мировать микроконтроллеры в удобной форме Разработка манипулятора для смешивания летучих веществ - это одна
из наименее освященных веток развития робототехники. Для создания такого проекта требуются электронная и механическая составляющие.
Основные цели, которые были поставлены при создании проекта, это разработка самого манипулятора, в бюджетном варианте с простой реализа-
цией на базе имеющихся материалов и средств, разработка программного обеспечения для управления устройством и создания алгоритмов
Помимо программирования требовалось выбрать подходящую меха-
ническую модель манипулятора, а после выбора необходимо изменить кон-
струкцию и обеспечить стабильную работу. За основу был выбран хобби ма-
нипулятор с последующей доработкой, а также приобретением специального дозирующего устройства и подключением его к микроконтроллеру.
В совокупности решение представляет собой аппаратно программный комплекс для выполнения необходимых задач. Так же при разработке учиты-
вается и мнение самих работников химических, биологических и других ла-
бораторий.
Актуальность поставленной задачи заключается в нее новизне и при-
менении новых технологий. Один из основных применений проекта - это ис-
пользование в химических лабораториях. С помощью готового проекта будет возможно работать с различными радиоактивными или химическими эле-
ментами, осуществлять химический анализ биологических объектов, смеши-
вать порошковые смеси. На данный момент уже имеются подобные решения,
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
6 |
|
Изм. Лист № докум. Подпись Дата |
|||
|
но они громоздки или имеют большую погрешность. Наше решение предла-
гает бюджетный вариант с возможностью развития проекта и совершенство-
ванием конструкции под определенные нужды.
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
7 |
|
Изм. Лист № докум. Подпись Дата |
|||
|
1 АНАЛИЗ ПРЕДМЕТНОЙ ОБЛАСТИ ПРОВОДИМОГО ИССЛЕ-
ДОВАНИЯ
1.1 Роботы и роботехнические системы
Робототехника – прикладная наука, которая занимается разработкой автоматизированных технических систем и являющаяся важнейшей техниче-
ской основой интенсификации производства. Основная отрасль применения роботов это промышленость, так как они занимают довольно большое поме-
щение, используют мощные моторы и их трудно программировать. С разви-
тием технологий удалось уменьшить и облегчить компоненты, не ухудшив при этом все остальные свойства. В настоящий момент имеется большое ко-
личество программируемых плат, к которым можно легко подсоединить дат-
чики и двигающиеся элементы. За счет развития появились мощные, ком-
пактные микроконтроллеры, которые могут выполнять довольно сложные задачи. Так же появилась возможность писать программное обеспечение для микроконтроллеров и программы, не на каких-то специфических языках или машинных кодах, а на более удобных и доступных языках. Для проектирова-
ния различных устройств требуются знания электроники, информатики, ра-
диотехники, механики и электротехники.
Основу любого роботизированного устройства составляют механиче-
ская, программная и электронная части. Разработка каждой части занимает продолжительное время и требует последовательности. В большинстве слу-
чаем механическая часть разрабатывается с нуля, исходя из проекта и финан-
совых возможностей. После этого подбираются электронные компоненты:
микропроцессор, сервомоторы, датчики и другие составляющие. Но основ-
ным элементом на данном этапе является контроллер-платформа, с помощью который будет осуществляться управление всеми остальными компонентами.
Для каждого проекта рассматриваются различные контроллеры и кри-
терии к ним, но главным фактором выбора является вычислительная мод-
ность и малое потребление питания. Исходя из этого, можно сделать вывод,
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
8 |
|
Изм. Лист № докум. Подпись Дата |
|||
|
что полученное устройство будет автономным и выполнять определенный алгоритм работы. Но так же можно внедрить и ручное управление.
Можно выделить основные классы роботов широкого назначения: ма-
нипуляционные и мобильные роботы. Так же бывают и другие классы, но они малоприменимы и специфичны.
1.2 Мобильные автоматизированные системы
Мобильный робот – автоматическая машина, в которой имеется дви-
жущееся шасси с автоматически управляемыми приводами. Такие роботы могут быть колесными, шагающими, гусеничными, плавающими, летающи-
ми или ползающими.
Наиболее распространенными роботами данного класса являются че-
тырёхколёсные и гусеничные роботы. Так же создаются роботы, имеющие два или одно колесо. Такое решение позволяет упростить конструкцию робо-
та, а также придать роботу дополнительную манёвренность. Существует не-
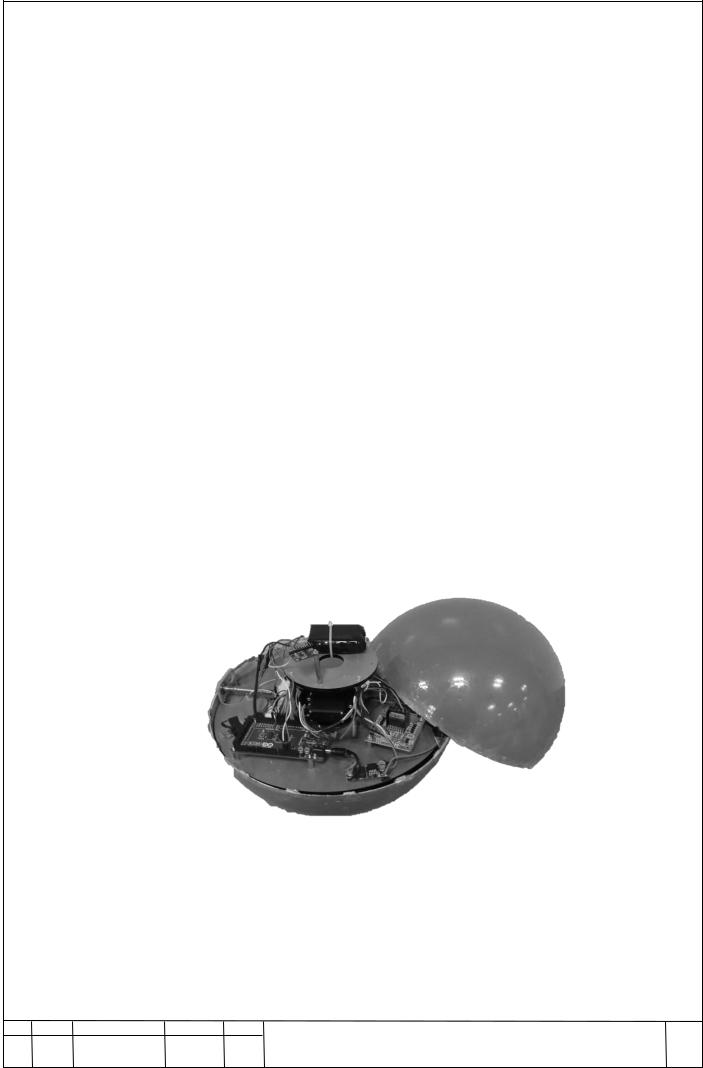
которое количество прототипов сферических роботов. Некоторые из них для перемещения используют вращение внутренней массы. На рисунке 1 изоб-
ражен пример сферического робота.
Рисунок 1 – Пример сферического робота В настоящее время перспективой являются шагающие роботы. Это
двуногие роботы, которые способны продвигаться по полу, лестнице и пере-
сеченной местности. Имеется различные технологии, позволяющие таким роботам передвигаться. Одной из самых необычных является ZMP техноло-
гия. Бортовой компьютер управляет роботом таким образом, чтобы сумма
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
9 |
|
Изм. Лист № докум. Подпись Дата |
|||
|
всех внешних сил, действующих на робота, была направлена в сторону по-
верхности, по которой перемещается робот. Благодаря этому не создаётся крутящего момента, который мог бы стать причиной падения робота. На ри-
сунке 2 изображён робот, способный перемещаться шагающим методом.
Рисунок 2 –Шагающий робот CHARLI
Альтернативой данного метода является прыгающие роботы, которые сохраняют свое равновесие за счет прыжков. При использовании алгоритма на двух и четырех ногах появляется способность к бегу.
Одной из самых удачных и широко применимых методов для шагаю-
щих роботов являются адаптивные алгоритмы поддержания равновесия. В
основном они базируются на расчете отклонений мгновенного положе-
ния центра масс робота от статически устойчивого положения или некоей наперед заданной траектории его движения. При движении робот поддержи-
вает постоянным отклонение текущего положения центра масс от точ-
ки статической устойчивости, что влечет необходимость своеобразной по-
становки ног, а также создает проблемы с остановкой машины на одном ме-
сте и отработкой переходных режимов ходьбы. Адаптивный алгоритм под-
держания устойчивости также может базироваться на сохранении постоянно-
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
10 |
|
Изм. Лист № докум. Подпись Дата |
|||
|