Материал: 1697
го направления вектора скорости центра масс системы, однако подобные ме-
тодики оказываются эффективными только на достаточно высоких скоро-
стях. Наибольший интерес для современной робототехники представляет разработка комбинированных методик поддержания устойчивости, сочетаю-
щих расчет кинематических характеристик системы с высокоэффективными методами вероятностного и эвристического анализа.
1.3 Манипуляционные автоматизированные системы
Манипуляционный робот это автоматическая машина, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько сте-
пеней подвижности, и устройства программного управления, которое служит для двигательных и управляющих функций. Основное распространение такие роботы получили в приборостроительной и машиностроительной отрасли. На рисунке 3 изображен промышленный манипулятор.
Рисунок 3 – Промышленный манипулятор IRB
Применяемый в качестве исполнительного устройства манипулятор является механизмом для управления пространственным положением ору-
дий, объектов труда и конструкционных узлов и элементов. Основная часть манипулятора состоит из механизмов со многими степенями свободы. Делят-
ся на управляемые и автоматические. Развитие манипуляторов привело к со-
зданию промышленных роботов. При их создании необходимо решение та-
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
11 |
|
Изм. Лист № докум. Подпись Дата |
|||
|
ких задач, как создание манёвренности, устойчивости в работе, выбор пра-
вильного соотношения полезных и холостых ходов.
Различают следующие виды манипуляторов:
Манипулятор (в горном деле) основной механизм буровой ка-
ретки, предназначенный для перемещения в призабойном пространстве авто-
податчика с перфоратором (бурильной машиной).
Манипулятор (в металлургии) машина для выполнения вспомо-
гательных операций, связанных с изменением положения заготовки при об-
работке металлов давлением. Различаются прокатный и ковочный манипуля-
тор. В кузнечных и прокатных цехах используются подвесные и напольные
манипуляторы, которые являются разновидностью кантователей (механиз-
мов для переворачивания (кантовки) изделий).
 Манипулятор (в ядерной технике) приспособление для работы с радиоактивными веществами, исключающее непосредственный контакт че-
Манипулятор (в ядерной технике) приспособление для работы с радиоактивными веществами, исключающее непосредственный контакт че-
ловека с этими веществами.
Манипуляторами оснащаются гидростаты для ведения океано-
графических и других работ на глубинах.
Платформа Гью-Стюарта разновидность параллельного манипу-
лятора, в которой используется октаэдральная компоновка стоек. Имеет шесть степеней свободы. Применяется в станкостроении, подводных иссле-
дованиях, авиационных спасательных операциях на море, летательных тре-
нажёрах, позиционировании спутниковых антенн, в телескопах и в ортопеди-
ческой хирургии.
Кран-манипулятор - мобильная грузоподъёмная машина, вклю-
чающая грузоподъёмный кран стрелового типа, смонтированный на автомо-
бильном шасси и служащий для его загрузки и разгрузки.
Для осуществления движения роботу требуется управление. Под эти понимается решение комплекса задач, связанных с адаптацией робота к кру-
гу решаемых им задач, программированием движений, синтезом системы
управления и её программного обеспечения.
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
12 |
|
Изм. Лист № докум. Подпись Дата |
|||
|
По типу управления робототехнические системы подразделяются на:
а) Биотехнические:
1)командные (кнопочное и рычажное управление отдельными звеньями робота);
2)копирующие (повтор движения человека, возможна реализация обрат-
ной связи, передающей прилагаемое усилие, экзоскелеты);
3) полуавтоматические (управление одним командным органом, напри-
мер, рукояткой всей кинематической схемой робота);
б) Автоматические:
1) программные (функционируют по заранее заданной программе, в ос-
новном предназначены для решения однообразных задач в неизменных условиях окружения);
2)адаптивные (решают типовые задачи, но адаптируются под условия функционирования);
3)интеллектуальные (наиболее развитые автоматические системы);
в) Интерактивные:
1) автоматизированные (возможно чередование автоматических и био-
технических режимов);
2) супервизорные (автоматические системы, в которых человек выполня-
ет только целеуказательные функции);
3) диалоговые (робот участвует в диалоге с человеком по выбору страте-
гии поведения, при этом, как правило, робот оснащается экспертной систе-
мой, способной прогнозировать результаты манипуляций и дающей советы по выбору цели).
В развитии методов управления роботами огромное значение имеют достижения технической кибернетики и теории автоматического управления.
1.4 Использование роботизированных систем
Кроме промышленного использования, манипуляторы применяются и в химических отраслях. Существуют решения способные дозировать различ-
ные вещества, в основном использую системы без использования манипуля-
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
13 |
|
Изм. Лист № докум. Подпись Дата |
|||
|
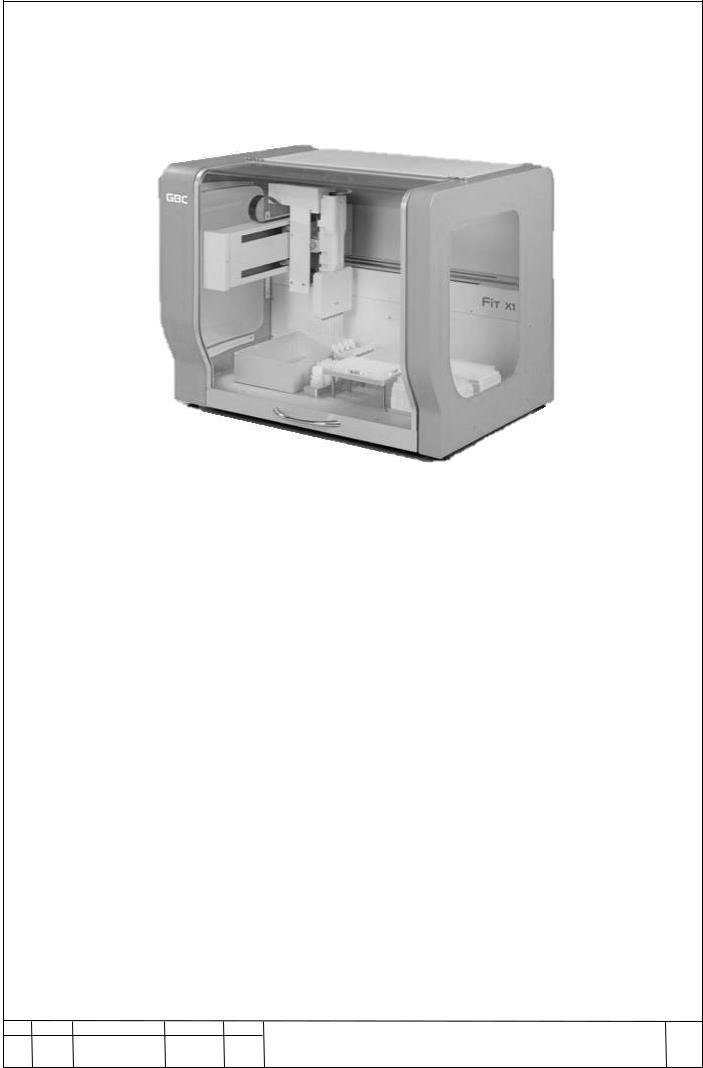
тора, построенные на принципе работы 3D принтеров. На рисунке4 изобра-
жена автоматическая дозирующая станция .
Рисунок 4 – Автоматическая дозирующая станция FitX
Подобные решения используются для непосредственного переливания исключительно жидких соединений посредством перемещения по всем осям координат для достижения конечного положения. Таким образом, подобные системы имею ограниченные функции и неспособны работать с летучими и ядовитыми веществами. Также имеют узкую специализацию.
Также имеются автоматизированные системы с использованием антро-
поморфных роботов. Данное решение более гибкое, но способно работать с ограниченным количеством реагентов, а также не имеет возможность расши-
рить свой функционал путем подключения дополнительных модулей. При использовании подобного решения запрещается работать с ядовитыми веще-
ствами в связи с особенностью конструкций.
В настоящее время данное направление слабо развито, и имеющихся решений мало, поэтому требуется разработать систему, удовлетворяющую необходимым требованиям. Главными условиями является работа с летучи-
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
14 |
|
Изм. Лист № докум. Подпись Дата |
|||
|
ми и ядовитыми веществами, доступность, простота использование, создание безопасных условий труда для человека.
На данный момент имеется возможность разработать проект, который будет удовлетворять описанным требованиям. Используя микроконтроллер и элементы в свободном доступе, возможно создания химического манипуля-
тора, который будет выполнять однотипные действия, исключая человече-
ский фактор. Благодаря такому решению возможно будет повысить произво-
дительность химических лабораторий и смежных отраслей Одна из проблем, с которой сталкиваются инженеры во время проекти-
рования подобных проектов это прочность конструкции. Особенность состо-
ит в том, что имеющиеся манипулятор делятся на две категории. Это про-
мышленные громоздкие манипулятор, которые имеют большую стоимость и простые хобби манипуляторы, которые имеют малые размеры, но достаточно не точные для выполнения различных операций.
Для обеспечения точности использую пневматические системы, кото-
рые используются в основном на промышленных установках, но на данный момент есть возможность заменить пневматические элементы на электро-
двигатели с позиционирование, что позволяет создать малогабаритную си-
стему с достаточной точностью.
В будущем предполагается использовать различные датчики и камеры что позволит расширить функционал устройства и обеспечить корректировку при ошибках. На данный момент системы не имеют подобного решения и при неверной установки элементов, операция смешивания жидкостей будет невозможна. В дальнейшем предполагается расширение имевшихся возмож-
ностей путем использования камер и датчиков что позволит автоматизиро-
ванной системе ориентироваться в пространстве.
Также одно из перспективных развитий – это использование в других лабораториях. Частным примером является медицинских лаборатории, кото-
рые проводят анализ веществ. С использованием автоматизированной систе-
мы можно будет исключить человеческий фактор, увеличить точность иссле-
|
|
Лист |
|
|
ВКР. 155510.09.04.04.ПЗ |
15 |
|
Изм. Лист № докум. Подпись Дата |
|||
|