Материал: xQG6ophSZk
11
где t0 - момент возникновения внешнего короткого замыкания, t1 - момент превышения значения доаварийной мощности после отключения внешнего короткого замыкания, Pдоав - вычисленное значение доаварийной мощности, усредненное за 4 секунды.
− площадь ускорения рассчитывается по формуле:
|
t2 |
|
|
|
|
Sуск = ∫(P(t) − Pдоав )dt , |
|
|
(4) |
|
t1 |
|
|
|
где t2 |
- момент фиксации максимального значения угла нагрузки, либо снижения |
|||
мощности ниже доаварийной при значении угла большем |
t1 , P(t) - текущее значение |
|||
активной мощности, потребляемой двигателем. |
|
|
|
|
− |
угол δ в доаварийном и аварийном режиме определяется по формулам: |
|
||
|
E = U + j × X d × I , |
|
|
(5) |
|
d = angle(E,U ), |
|
|
(6) |
где U |
- вектор напряжения прямой последовательности |
на вводах |
двигателя, |
X d - |
синхронное индуктивное сопротивление двигателя по |
продольной |
оси, I |
- ток |
|
потребляемый двигателем, angle( ) - функция вычисления угла между векторами. |
|
|||
На основании проведенных экспериментов отмечены особенности работы функции:
−близость значений площадей ускорения и торможения, что приводит к необходимости вычисления их с высокой точностью.
−возможность неправильной работы в случае колебаний мощности в режиме потери питания;
−функция никак не учитывает подпитку места КЗ от двигателя;
−применяемый метод расчета угла δ дает некорректные результаты в режиме потери питания.
Функция опережающего отключения (далее ФОО) включает в себя грубую ступень, точную ступень и резервную ступень, при этом работа ФОО разделена на несколько режимов: нормальный, режим короткого замыкания и послеаварийный режим.
Грубая ступень прогнозирует переход СД в асинхронный режим по факту достижения приращением абсолютного угла ротора СД уставки, определяемой автоматически по значению нагрузки СД в доаварийном режиме:
δ |
|
= 2,8 −1,1 |
Ρда |
, |
(7) |
|
|
||||
|
сраб |
|
Ρн |
|
|
|
|
|
|
|
|
где δср - уставка, при которой |
срабатывает грубая ступень ФОО, радиан, |
Ρда - |
|||
мощность ДС в доаварийном режиме, Вт, Ρн - номинальная мощность двигателя, Вт. При этом приращение угла δ , рад., рассчитывается в темпе переходного процесса
по выражениям:
Dd = |
t |
|
∫ s dt , |
(8) |
|
|
t0 |
|
t
s = 1 ∫ (Pдоав - P + Rэкв × ∑i 2 ) × dt , (9)
TJ t0
где s – скольжение ротора синхронного двигателя в текущий момент времени; P – текущая мощность синхронного двигателя в переходном процессе; Rэкв – эквивалентное
сопротивление активных потерь СД в режиме КЗ, ∑ i2 - сумма квадратов текущих
мгновенных значений фазных токов СД; TJ – постоянная инерции двигателя совместно с приводом.
12
Точная ступень прогнозирует переход ДС в асинхронный режим путем сравнения соотношения между площадями ускорения и торможения, при этом для устойчивой работы ДС должно выполняться соотношение:
sУ − sТ |
³ k Д |
(10) |
|
||
sУ |
|
|
где kД – коэффициент динамической устойчивости, предлагается принимать равным 0,22. Проведенные эксперименты показали корректность работы грубой ступени как в случае нарушения устойчивости, так и при её сохранении при отсутствии форсировки
возбуждения.
Как показали эксперименты, работа точной ступени не всегда корректна. Проведенный анализа и моделирование существующих алгоритмов контроля
устойчивости были учтены при разработке алгоритма.
При разработке были проанализированы различные методы вычисления угла δ : анализ показал, что наиболее точные результаты дает метод с использованием модели СД.
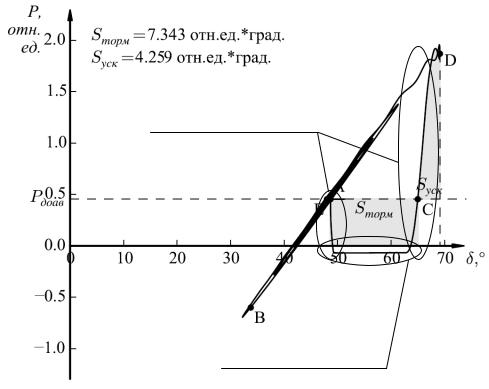
В разработанном алгоритме контроля устойчивости учтено увеличение площади торможения за счет подпитки места КЗ или несинхронной нагрузки, а также изменение соотношения площадей за счет ограничений преобразования Фурье. Замечания графически показаны на рисунке 9.
Рисунок 9. Недостатки в расчете площади ускорения и торможения
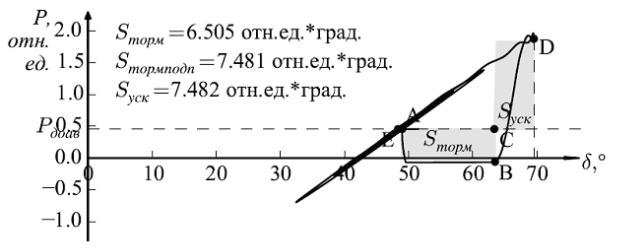
После учета вышеперечисленных недостатков, значения площадей практически сравнялись, как показано на рисунке 10.
В алгоритме контроля устойчивости используется определение угла на основе математической модели СД в уравнениях Парка-Горева. Применяемый подход близок к используемому при реализации бездатчикового векторного управления – угол нагрузки определяется итерационно на основе измеренных значений токов и напряжений на вводах двигателя.
13
Рисунок 10. Учет ограничений преобразования Фурье при расчете площадей торможения и ускорения
При этом для определения потокосцепления статора в первом приближении используется уравнение вида:
|
|
dy |
|
R |
|
|
|
|
|
R |
|
|
R |
|
|
|
|
|
e1 |
|
|
|
|
|
|
|
= us - Rs ×is , |
|
(11) |
||
|
|
dt |
|
||||
|
|
|
|
|
|
||
R |
|
|
|
|
|
R |
|
где ψ e1 |
- первое приближение вектора потокосцепления статора, |
us |
- текущее значение |
||||
вектора напряжения статора, is - текущее значение вектора тока статора.
Для определения тока статора в первом приближении используется уравнение вида:
|
R |
|
R |
|
|
|
|
|
= |
ye1 - yF × exp( jqr0 ) |
|
|
|
|
|
|
i |
|
, |
|
(12) |
||
|
|
|
|||||
|
e1 |
|
Ls |
|
|
|
|
где ie1 |
- первое приближение вектора тока ротора, ψ F |
- |
модуль составляющей потока |
||||
ротора, |
обусловленной контуром возбуждения, θr 0 |
|
- |
угол поворота ротора, Ls - |
|||
индуктивность статора.
После определения первого приближения тока статора, находится его отклонение от реального тока и вносится соответствующая корректировка в предполагаемое значение угла ротора и потокосцепления статора. После внесения корректировок расчет повторяется. Целевой функцией является минимизация отклонения предполагаемого тока ротора от реального. Ввиду использования тригонометрических функций с неизвестными заранее значениями аргументов, алгоритм обладает высокой вычислительной сложностью. Показано, что предварительное задание значений тригонометрических функций со значениями аргументов от 0° до 360° с шагом 1° и последующей аппроксимацией, позволяет существенно сократить количество необходимых вычислений, практически не сказываясь на результатах определения угла.
Для учета вклада от демпферных контуров, в алгоритм расчета введены дополнительные уточняющие выражения, зависящие от частоты вращения двигателя.
Предлагаемый метод расчета угла нагрузки помимо обеспечения повышенной, по сравнению с применяемыми в алгоритмах контроля устойчивости, точности, не требует определения режима работы двигателя, а поскольку все вычисления осуществляются с фазными составляющими векторов, алгоритм корректно работает в несимметричных режимах.
Метод имеет пути дополнительного совершенствования, например применение адаптивных моделей. Результаты вычисления угла различными способами приведены на рисунке 11.
14
Рисунок 11. Сравнение различных способов расчета угла δ
На рисунке штриховой линией показан график, рассчитанный согласно ФОО, точками показан график, построенный на основе формулы:
δ i |
= δ i−1 |
+ |
360 × |
f × Dt 2 |
× (Pдоав - Pi + Rэкв _ доав × ∑i 2 ) , |
(13) |
|
×Tj |
|||||
|
|
2 |
|
|
||
график угла, полученный на основе уравнений Парка-Горева практически совпал с полученным из модели Matlab.
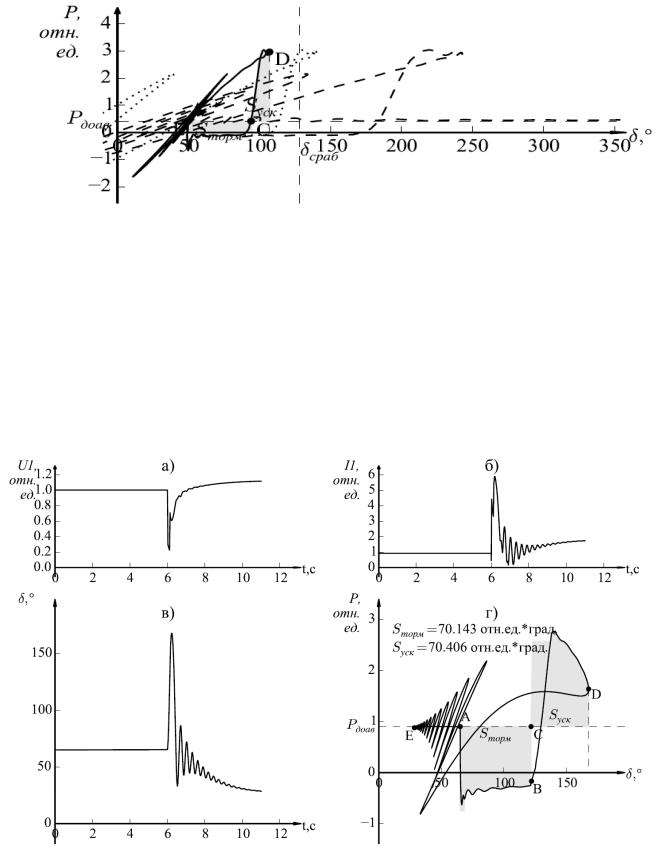
В главе 4 приводятся результаты моделирования различных видов коротких замыканий в точках 1-4 схемы, представленной на рисунке 1. Графики вынесены в приложения к диссертационной работе. Пример графиков основных параметров работы синхронной машины при коротком замыкании в точке 2, показан на рисунке 12. На рисунке 12 д) показан график работы разработанного алгоритма контроля устойчивости.
Рисунок 12. Пример основных параметров работы СД при КЗ в точке 2
При моделировании, разработанный алгоритм контроля устойчивости был реализован в качестве составной части модели микропроцессорного устройства защиты и автоматики, при этом расчетное значение угла δ выводилось в Comtrade-файл для последующего анализа средствами Python.
15
Были проведены следующие вычислительные эксперименты:
1.Трехфазные короткие замыкания в точках 1-4 различной длительности до нахождения границы устойчивости (ток возбуждения - постоянный);
2.Двухфазные короткие замыкания в точках 1-4 различной длительности до нахождения границы устойчивости (ток возбуждения - постоянный);
3.Однофазные короткие замыкания в точках 1, 2, 4 длительностью 0,5с (ток возбуждения - постоянный);
4.Трехфазные короткие замыкания в точке 4 различной длительности до нахождения границы устойчивости (ток возбуждения регулируется по напряжению на вводах двигателя, с релейной форсировкой возбуждения);
5.Трехфазные короткие замыкания в точке 4 различной длительности до нахождения границы устойчивости (ток возбуждения регулируется по напряжению на вводах двигателя и коэффициенту мощности, с релейной форсировкой возбуждения);
6.Перерыв питания различной длительности до нахождения границы устойчивости (ток возбуждения регулируется по напряжению на вводах двигателя, с релейной форсировкой возбуждения);
На основании проведенных экспериментов были сделаны следующие выводы:
1.при потере питания без внешнего короткого замыкания, возможно сохранение устойчивости двигателя при превышении внутренним углом значения 180°;
2.нарушение устойчивости двигателя при одном и том же времени отключения короткого замыкания и одинаковых алгоритмах работы АРВ зависит от расстояния до места замыкания и нагрузки двигателя, что подтверждает выводы других исследователей;
3.во всех экспериментах, устойчивость сохранялась при времени восстановления питания 100 мс, что дает возможность применения синхронного самозапуска (типовое время действия релейных защит, работающих без выдержки времени составляет от 30 до 60 мс, типовое время срабатывания БАВР - от 100 до 150мс);
4.при нагрузке двигателя равной 50% от номинальной, появляется возможность осуществить синхронный самозапуск средствами АВР (типовое время восстановления питания - 0,5 с)
5.для корректной работы АВР и БАВР необходимо выявлять, сохранит ли двигатель устойчивость в темпе переходного процесса;
6.при всех видах перерыва питания, разработанный алгоритм контроля устойчивости обеспечил корректное выявление сохранения или потери устойчивости до первого проворота ротора;
7.во всех промоделированных режимах регулирования возбуждения, разработанный алгоритм контроля устойчивости обеспечивал корректное обнаружение потери устойчивости двигателя.
Практически невозможно увеличить запас устойчивости путем настройки контуров регулятора возбуждения, при выведенной форсировке возбуждения и гашении поля. Указанное справедливо как для регулятора напряжения на вводах двигателя, так и для регуляторов коэффициента мощности и реактивной мощности. Изменение напряжения при коротком замыкании оказывается значительным поэтому регулятор уходит в ограничение. Исходя из этого настройки контуров регулирования АРВ следует выполнять на основе требований к работе двигателя при напряжении на его вводах близком к номинальному.
Поскольку при экспериментах алгоритм контроля устойчивости был использован в качестве программы контроллера, входящего в модель микропроцессорного устройства защиты и автоматики (см. рис. 5), эксперименты доказывают практическую реализуемость алгоритма в устройстве защиты и автоматики.
Эксперименты показали, что применение параметров срабатывания защит (токовой отсечки, защиты от потери питания, защиты от перегрузки), рассчитанных в соответствии
сразработанной методикой практически исключает возможность их излишнего