Материал: xQG6ophSZk
6
агрегатов, отмечена невозможность поддержания устойчивости работы СД средствами технологических регуляторов
.
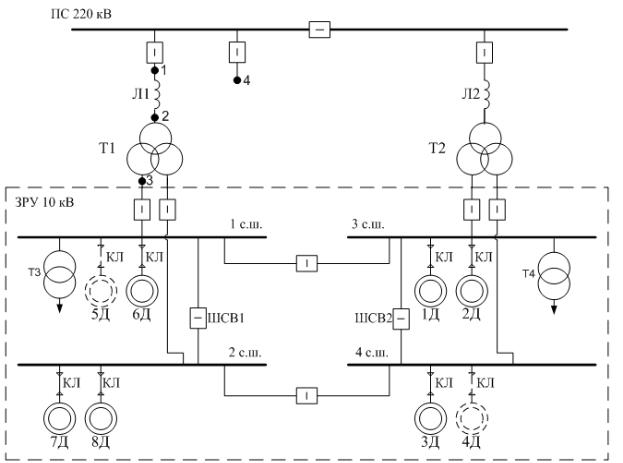
Рисунок 1. Схема электроснабжения компрессорной станции «Лукояновская»
Проанализировано влияние изменений напряжения и частоты питающей сети на работу синхронных двигателей, в том числе на изменение угловой характеристики работы двигателя. Показано влияние регулирования возбуждения и демпферного контура на угловую характеристику работы двигателя. Показано, что практические критерии устойчивости – по времени отключения внешнего короткого замыкания, по соотношению площадей ускорения и торможения могут быть применены в алгоритме контроля устойчивости, работающем в реальном времени.
Предложено для контроля устойчивости в реальном времени использовать следующие способы:
–постоянное сравнение площади торможения и предполагаемой максимальновозможной площади ускорения при наличии внешнего КЗ и постоянного сравнения площадей торможения и ускорения после отключения внешнего КЗ;
–определение достижения углом нагрузки предельного угла отключения КЗ либо предельного угла после отключения КЗ.
Предельный угол отклонения угла нагрузки после отключения КЗ рассчитывается по формуле:
δ кр |
|
δ |
× P |
|
|
|
|
1 |
1 |
|
, |
(1) |
|
|
|
|||||
= 180° - arcsin sin |
P1 - P2 |
|
||||
|
|
|
|
|
||
Предельный угол отключения КЗ рассчитывается по формуле:
|
P ×(d |
|
- d ) + P II ×cos d |
|
- P III ×cos d |
|
||||
dоткл.пр. = arccos |
1 |
кр |
1 |
m |
|
кр |
m |
1 |
, |
(2) |
|
|
|
P II - P III |
|
|
|
||||
|
|
|
|
m |
m |
|
|
|
|
|
7
Выдвинута идея использования расчетных значений предельных углов с учетом возможной форсировки возбуждения в качестве дополнительных признаков потери синхронизма.
Приведённый анализ источников показал, что допустимое время перерыва питания при котором гарантируется успешная ресинхронизация не превышает 0,3с. Восстановление питания за такое время возможно средствами быстродействующего включения резервного питания (БАВР). При более длительных перерывах питания должно применяться гашение поля и автоматическое включение резервного питания (АВР) с асинхронным самозапуском.
Проведенный анализ работы релейной защиты и автоматики подстанции с синхронными двигателями при снижении питающего напряжения показал возможность:
−излишнего срабатывания токовых защит двигателей, если при их расчете не учитывалась возможность самозапуска;
−несинхронного включения возбужденного СД при быстром восстановлении питания;
−замедление АВР вследствие длительного поддержания напряжения на шинах синхронными двигателями.
На основании анализа режимов самозапуска синхронных двигателей сделан вывод о преимуществах синхронного самозапуска: меньших пусковых токах и моментах, меньшем влиянии на питающую сеть и соседние двигатели, появлении возможности избежать ступенчатого самозапуска и запускать двигатели одновременно.
Вторая глава посвящена разработке комплексной модели подстанции с синхронной нагрузкой, являющейся одним из научных результатов данной работы (научный результат №1). Поскольку близкие задачи по нахождению областей устойчивости и оптимальных режимов работы оборудования решаются в программах по моделированию энергосистем, при разработке модели учтены особенности математических моделей, применяемых в этих программах. Основные проанализированные программы: Mustang, DAKAR,
АНАРЭС-2000, EUROSTAG.
Обосновано использование встроенной модели СД, линий электропередачи и трансформаторов MATLAB (Simulink) для моделирования режимов потери питания синхронных двигателей.
Были разработаны собственные модели с использованием «S-функций» Matlab для моделирования:
−автоматического регулятора возбуждения синхронного двигателя, поскольку встроенные в MATLAB модели предназначены для моделирования АРВ синхронных генераторов и не обеспечивают всех режимов работы АРВ синхронных двигателей;
−измерительных трансформаторов тока, поскольку встроенных в Matlab моделей
ТТнет; при этом возможно насыщение ТТ в переходных режимах двигательной нагрузки;
−функциональная модель устройства релейной защиты и автоматики СД, позволяющая осуществлять проверку эффективности новых алгоритмов работы РЗА до их реализации в устройстве (научный результат №2);
−функциональная модель устройства контроля устойчивости работы синхронных двигателей на базе модели устройства РЗА.
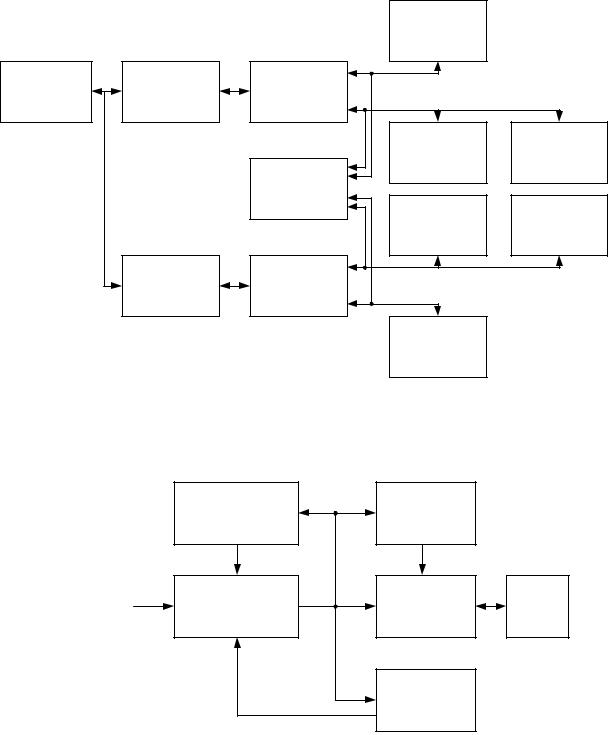
Все модели были объединены в комплексную модель газоперекачивающей станции. Общая структурная схема модели газоперекачивающей станции приведена на рисунке 2.
8
Рисунок 2. Общая структура модели газоперекачивающей станции
В комплексную модель в качестве подсистем входят модели отдельных синхронных электроприводов, АРВ и защит электродвигателя. Состав отдельной подсистемы представлен на рисунке 3.
Рисунок 3. Состав подсистемы электропривода, АРВ и защит (разработанные блоки показаны пунктиром)
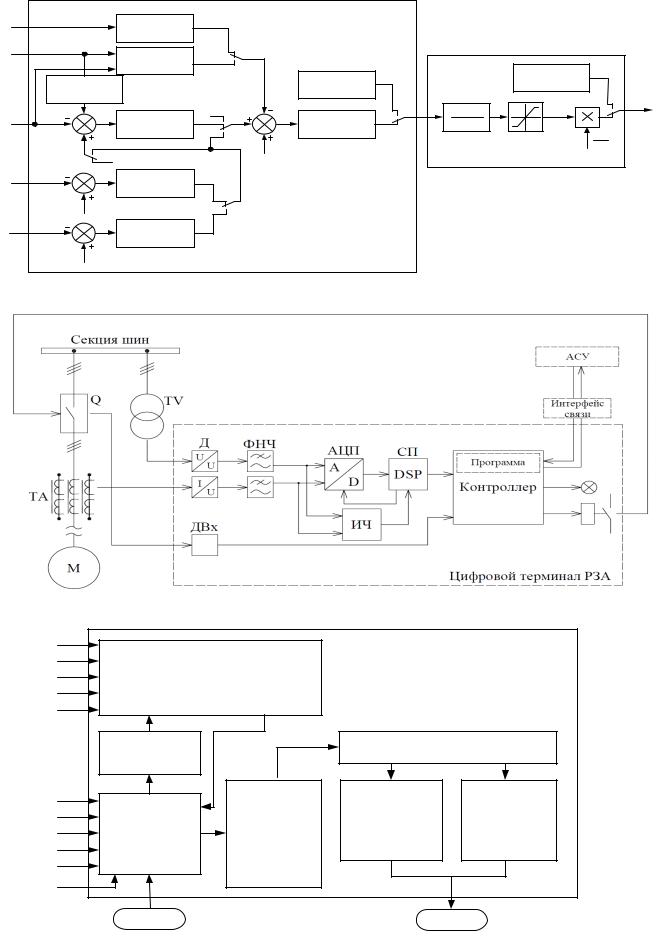
В состав подсистемы электропривода АРВ и защит входят модели системы возбуждения, устройства РЗА и алгоритм контроля устойчивости работы двигателя, структуры которых показаны на рисунках 4, 5 и 6 соответственно.
Третья глава посвящена моделированию работы существующих алгоритмов контроля устойчивости и разработке нового алгоритма. Реализована схема исследований, изображенная на рисунке 7.
|
9 |
|
|
i f |
|
|
|
IСД |
|
|
|
|
0 |
КТВ |
Eqe |
UСШ |
Eqe1 |
||
1 |
+ pTТВ |
|
|
|
|
||
|
|
|
U Г |
UСШ0 |
I f 0 |
|
U Г0 |
|
|
||
cosϕ |
|
|
|
cos ϕ0 |
|
|
|
Q |
|
|
|
Q0 |
|
|
|
|
Рисунок 4. Структура модели АРВ |
|
|
Рисунок 5. Структура модели микропроцессорного устройства РЗА |
Рисунок 6. Структура алгоритма контроля устойчивости работы двигателя |
10
Рисунок 7 Схема проводимых исследований
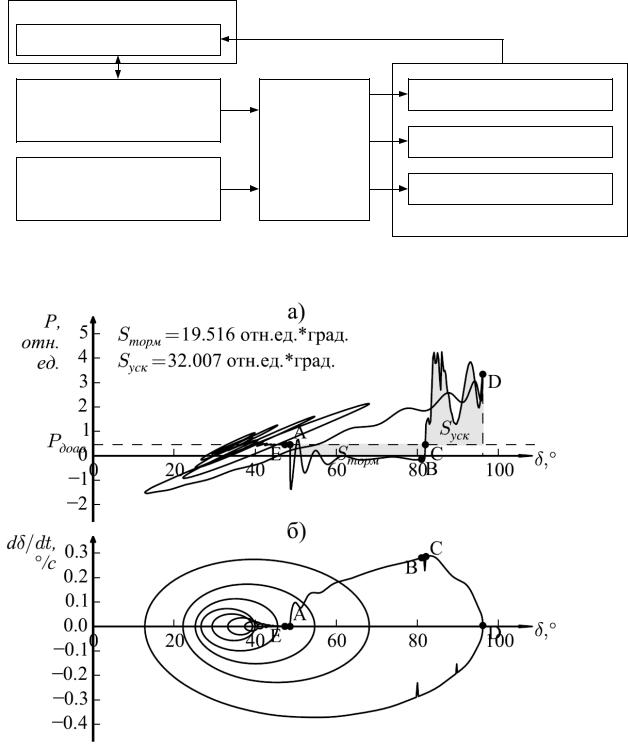
Типовые кривые, получаемые при моделировании, изображены на рисунке 8.
Рисунок 8. Угловая характеристика двигателя при кратковременной потере питания, площадь торможения учтена упрощенно
Приведены результаты работы разработанных программ, моделирующих работу функций ANSI 78 PS и функции опережающего отключения.
Функция ANSI 78 PS определяет устойчивость работы двигателя на основании сравнения площадь ускорения и торможения, при этом:
− площадь торможения рассчитывается по формуле:
t1 |
|
Sуск = ∫ Pдоавdt , |
(3) |
t0 |
|