Материал: Теория сетевых войн. Живучесть атакуемых сетей. учеб. пособие. Остапенко А.Г., Калашников А.О
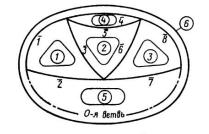
Рис. 4.11. Условныеобозначения при анализе надежности методом замкнутых контуров
Топология структурной схемы надежности отображается в матрице инцидентности контуров и ветвей В, элементы которой brv, 1≤r≤m, 1≤v≤n определяются следующим образом:
|
1,если |
принадлежит |
муконтуру |
,. |
b = |
− яветвьв противном случаеr− |
|
||
|
0, |
|
|
Элементы mrr’ квадратной матрицы контурных разделений М порядка m определяются следующим образом: mrr’=(М) rr’(r, r’=1,…, m) представляет собой функцию отказа прямого разделения r-го и r’-го замкнутых контуров. Таким образом, для диагональных элементов mrr=1(r=1,…, m) в то время, как остальные элементы mrr’(r≠r’, r=1,…, m) определяются булевой суммой функций отказа всех ветвей, прямо разделяющих r-й и r’-й замкнутые контуры.
Если в диагональной матрице Х порядка n (матрица отказов ветвей) объединяют функции отказов отдельных ветвей X=<x1,x2,…,xn>, то
M=I˅B˄XBT, (4.49)
Доказательство этой формулы можно провести так же, как и формулы в предыдущем пункте. В частности, при r≠r’
91
′ = |
( ˄ ′ ) , |
(4.50) |
в соответствии с определением матрицы М.
Теорема 3 [52]. Элемент (M(i) rr’) (r, r’=1,…, m) i-й степени булевой матрицы контурных разделений М представляет собой функцию отказа всех разделяющих сечений между контурами r и r’, проходящих через любые другие замкнутые контуры, число которых 0, 1, …, i-1.
Теорема 4 [52]. Элемент матрицы (M(m-1)) m-1, m представляет собой функцию отказа рассматриваемой структурной схемы надежности. Если при выполнении булева умножения матриц последовательно опускать булевы выражения, соответствующие разделяющим сечениям, которые многократно встречаются по меньшей мере у одного замкнутого контура, то получим функцию отказа в виде, соответствующем представлению функции работоспособности системы как параллельного соединения эквивалентных схем дополнений минимальных сечений (по работоспособности) между (m-1)-м и m-м контурами.
В качестве примера рассмотрим представленную на рисунке 4.12 структурную схему надежности с обозначенными замкнутыми контурами и ветвями.
Рис. 4.12. Эквивалентная схема по отказу с обозначенными ветвями и контурами
92
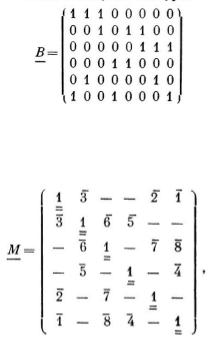
Из матрицы отказов ветвей X=(x1,x2, x3,x4, x5,x6, x7,x8) и матрицы инцидентности замкнутых контуров и ветвей
получаем матрицу контурных разделений M=I˅B˄XBT, имеющую вид
которую можно построить, исходя непосредственно из структурной схемы надежности. Опуская промежуточные расчеты, приходим к следующему результату:
S(x)=(M(5))56=12˅78˅1367˅2345˅2368˅4567
или S(x)=(1˅2)˄(7˅8) ˄(1˅3˅6˅7) ˄(2˅3˅4˅5) ˄(2˅3˅6˅8) ˄(4˅5˅6˅7).
В противоположность методу узлов метод замкнутых контуров позволяет проанализировать непосредственно лишь те структурные схемы надежности, граф которых является плоским. Если все же хотят применить метод замкнутых контуров для неплоских графов, то предварительно
93
необходимо сделать переход, приводящий к плоским графам с помощью формулы приведения:
S(x1, …, xi-1, xi, xi+1,…, xn)= xiS(x1, …, xi-1, 0, xi+1,…, xn)+ xiS(x1, …, xi-1, 1, xi+1,…, xn)= xiS1(x1, …, xi-1, xi+1,…, xn)+ xiS2(x1,
…, xi-1, xi+1,…, xn) |
(4.51) |
Формулу (4.51) применяют для того, чтобы избавиться от пересечений ветвей неплоского графа, которые не удается устранить непрерывными преобразованиями типа «изгиб ветвей».
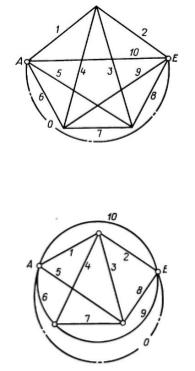
Рис. 4.13. Пятиугольник как пример неплоского графа
Рис. 4.14. Другое представление графа на (рис. 4.13).
94
У графа с одним существенным пересечением ветвей можно с помощью теоремы приведения удалить одну из тех ветвей, которые обусловливают это пересечение, и таким образом от неплоского графа перейти к 2 плоским графам с (n- 1)-й ветвью. Неплоские графы с k существенными пересечениями также можно преобразовать многократным применением теоремы приведения в плоские графы.
В качестве примера проанализируем методом замкнутых контуров схему надежности, приведенную на рисунке 4.13.
Очевидно, что ветви графа можно изогнуть так, что из 5 точек пересечения останется лишь одна, например, пересечение ветвей 4 и 5 (рис. 4.14).
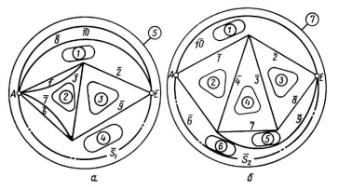
Для определения всех минимальных сечений можно представить функцию отказа, согласно уравнению (4.51), следующим образом:
S(x1, …, x10)= x5S1(x1, …, x4, x6,…, x10)+ x5S2(x1, …, x4,
x6,…, x10) |
(4.52) |
Графы, отвечающие символам |
S1 и S2, являются |
плоскими, их структура представлена на (рис. 4.15.).
Рис. 4.15. Плоские графы, получающиеся из пятиугольника (а - ветвь 5 заведомо не функционирует, б –
ветвь 5 заведомо функционирует).
95