Материал: Теория сетевых войн. Живучесть атакуемых сетей. учеб. пособие. Остапенко А.Г., Калашников А.О
Теорема 1б [52]. Эквивалентную схему по отказу системы можно представить в виде последовательного соединения эквивалентных схем дополнений минимальных сечений по отказу (минимальных путей по работоспособности), при этом, если x (σ = 1,…,s̅= m)- минимальные сечения по отказу и − минимальные пути по работоспособности, функция отказа системы имеет вид
̅̅= [1− (1 − ) ] = (1− ), (4.39)
Теорема 2а [52]. Эквивалентную схему по работоспособности системы можно представить в виде последовательного соединения эквивалентных схем дополнений минимальных сечений по работоспособности (минимальных путей по отказу) ,при этом, если
( = 1,…, |
минимальные сечения по работоспособности и |
|||||||||
= |
) − |
минимальные пути по отказу, функция |
||||||||
x (σ = 1,…,s)- |
|
|
|
|
||||||
работоспособности системы имеет вид |
] |
|
|
|||||||
|
|
|
|
|
= |
[1−(1− ) |
|
|
||
= |
|
1− |
|
|
(1− ) |
= |
1− |
̅̅ , |
(4.40) |
|
Теорема 2б [52]. Эквивалентную схему отказа системы можно представить в виде параллельного соединения эквивалентных схем минимальных путей по отказу (дополнений минимальных сечений о работоспособности), при этом функция отказа системы принимает вид
̅̅= |
̅ |
̅ |
||
̅ = 1− (1− |
̅) |
|||
|
|
|
[1− (1− ) ], |
(4.41) |
= 1− |
||||
Формулировки приведенных выше теорем используют существующую по определению двойственность между функциями работоспособности и отказа системы. Если
81
известна эквивалентная схема по работоспособности (по отказу) системы и она представляет собой граф, то можно, воспользовавшись известными методами, построить граф , являющийся структурно-двойственным по отношению к первоначальному графу. Этот структурно-двойственный граф можно интерпретировать так же, как эквивалентную схему по отказу(по работоспособности) системы Фиктивная ветвь между входом и выходом системы, являющаяся символическим представлением функции работоспособности (отказа) системы, после структурно-двойственного преобразования переходит в фиктивную ветвь, являющуюся символическим представлением функции отказа (работоспособности) системы.
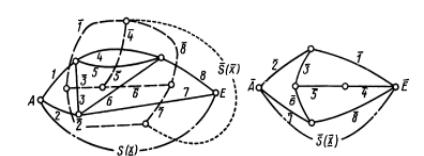
На рисунке 4.6 представлены эквивалентные схемы по работоспособности и отказу системы, построенные с учетом структурной двойственности. Для функции работоспособности (отказа) отдельных ветвей на рисунке указаны лишь индексы при булевых переменных, а сами булевы переменные опущены например, на рисунке стоит 2 вместо х2 , и т.д [52].
Определенные выше связи между эквивалентными схемами по работоспособности и отказу.
Рис. 4.6. Эквивалентная схема по работоспособности и соответствующая ей эквивалентная схема по отказу. Можно теперь наглядно пояснить следующим образом.
Эквивалентная схема по работоспособности содержит 10 минимальных путей:
х=(10010001)т,х =(10001001)т,х =(10010110)т,
х=(10001110)т,х =(10100010)т,х =(10100101)т,
82
х=(01000010)т,х =(01000101)т,х =(01101001)т,
х=(01110001)т,
и 6 минимальных сечений:
х=(00111111)т,х =(10000111)т,х =(10011010)т,х = (11111100)т,х =(11100001)т,
х=(01011001)т.
Эквивалентная схема по отказу содержит соответственно 10 минимальных сечений и 6 минимальных путей.
Эквивалентную схему по работоспособности рассматриваемой системы можно комбинированным последовательно-параллельным соединением. Эквивалентную схему по отказу системы также можно представить в соответствии с теоремами 1б и 2б эквивалентным комбинированным последовательно-параллельным соединением.
Наряду с названными формами представления функций работоспособности и отказа системы можно пользоваться ,естественно, и известными из теории булевых функций нормальными формами.
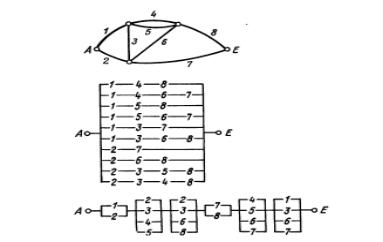
Рис.4.7.Эквивалентная схема по работоспособности системы и соответствующие ей эквивалентные схемы,
полученные на основании теорем 1а и 2а.
83
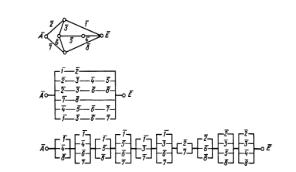
Рис. 4.8. Эквивалентная схема по отказу системы и соответствующие ей эквивалентные схемы, полученные на
основании теорем 1б и 2б.
Дизъюнктивная и конъюнктивная нормальные формы
функции |
работоспособности |
системы |
определяются |
|||
следующим образом: |
(1 − |
) |
] , |
|
||
гдеS(x)=1, |
S(x )=∑ [∏ |
(4.42) |
||||
|
|
S(x )=∏[1−∏ |
(1 − |
) |
], |
(4.43) |
где S(x)=0.
Приведенные выше формы представления функции работоспособности системы можно элементарными преобразованиями перевести в однозначно-определенную линейную форму(с соблюдением степеней булевых переменных).
Для |
S(x)= |
∑ ∏ |
* |
, |
(4.44) |
|
|
|
|||
|
коэффициентов |
|
|
получаются всегда |
|
целочисленные значения.К примеру для параллельного соединения из трех элементов получают следующую функцию работоспособности системы:
84
S( |
, |
, |
)=1-∏ |
+ (1 − )= |
+ + - |
(4.45.1)- |
- |
Линейная форма состоит в этом случае из семи |
|||||||
слагаемых. |
|
Для |
коэффициентов |
булева векторах |
в |
||
рассматриваемом примере имеем: |
|
|
|
||||
= |
= |
= |
=1, |
|
|
|
|
= |
= |
=-1, |
|
|
|
|
|
=(1,0,0) , =(0,1,0) , =(1,0,0) , =(1,1,0) , = (1,0,1) , =(0,1,1) , =(1,1,1) , (4.45.2)
Линейная форма для замкнутых систем даже с небольшим количеством компонентов может относительно быстро вырасти до очень большого числа слагаемых. Вообще наибольшая трудность при определении функции работоспособности сложных систем заключается в отыскании всех путей, сечений ,минимальных путей [52].
4.4.4. Методы расчета булевых функций
Очевидно, не нарушая общности, здесь можно рассмотреть только методы вычисления минимальных путей и минимальных сечений по работоспособности. Эквивалентную схему по работоспособности системы будем называть структурной схемой расчет надежности, Развиваемые ниже методы в известной степени подобны методу узловых потенциалов и методу контурных токов, существующих в теории электрических цепей.
Покажем прежде всего, что любую предложенную структурную схему расчета надежности можно проанализировать методом узловых потенциалов независимо от того, представима эта схема в виде плоского графа или нет.
85