Материал: Теория сетевых войн. Живучесть атакуемых сетей. учеб. пособие. Остапенко А.Г., Калашников А.О

Выражения (4.28)-(4.30) характеризуют модель полностью и однозначно. Однако может оказаться, что в действительности функция работоспособности системы вовсе не зависит от некоторых из n булевых переменных. Подобные элементы для поведения системы являются в таком случае несущественными. Точнее, определим их следующим образом: v-ый элемент системы называется несущественным, если
условие |
|
|
+1,…. ) = ( 1, 2,…, −1,1, +1,…. ) |
, справедливо( 1, 2,…, −1,0, |
|||
, ,…, |
для |
всех |
реализаций булевых переменных |
,0, |
,…. |
. В противном случае v-ый элемент |
|
|
|
|
|
называется существенным.
Систему называют нередуцируемой, если она не содержит несущественных элементов. В противном случае система будет допускать редуцирование [52].
Для краткости будем использовать векторную форму
записи. Пусть |
|
есть булев вектор-столбец с n |
|
элементами. |
Индекс T обозначает операцию транспонирования. |
||
|
= ( ,…, ) |
|
|
ТТ
Вчастности, 1=(1, ...,1) и 0=(0,...,0) . Используемые в дальнейшем неравенства между булевыми векторами
определяются следующим образом:
≥ ,если ≥ для = 1,2,…, , > ,если |
(4.31) |
|||||||
|
|
|
|
|
|
|
|
|
≥,
иразличаются по крайней мере одной компонентой
вектора |
|
и |
. Тогда формулу (4.30) |
можно записать в |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
следующем |
|
виде: |
≤ |
|
,если ≤ , |
(4.32) |
|||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
В качестве вычислительных операций над булевыми переменными ( ,…, ) применяют булево сложение (дизъюнкцию), обозначаемое знаком " ", и булево умножение (конъюнкцию), обозначаемое знаком " ". В таблице 6 приведены результаты сложения и умножения для всех 2n реализаций булева вектора.
Если обе возможные реализации каждой булевой переменной ограничиваются лишь числами 0 и 1, то булево сложение и умножение можно заменить эквивалентными
76
алгебраическими операциями.
Определение операции сложения и умножения в булевой алгебре
Номер |
Булевы переменные |
|
|
|
|
|
|||||
реализации |
|
|
|
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
0 |
0 |
... |
0 |
0 |
0 |
|
0 |
0 |
1 |
|
0 |
0 |
0 |
... |
0 |
0 |
1 |
|
0 |
1 |
2 |
|
0 |
0 |
0 |
... |
0 |
1 |
0 |
|
0 |
1 |
3 |
|
0 |
0 |
0 |
... |
0 |
1 |
1 |
|
0 |
1 |
. |
|
. |
. |
. |
... |
. |
. |
. |
|
. |
. |
. |
|
. |
. |
. |
... |
. |
. |
. |
|
. |
. |
. |
|
. |
. |
. |
... |
. |
. |
. |
|
. |
. |
2n-3 |
|
1 |
1 |
1 |
... |
1 |
0 |
1 |
|
0 |
1 |
2n-2 |
|
1 |
1 |
1 |
... |
1 |
1 |
0 |
|
0 |
1 |
2n-1 |
|
1 |
1 |
1 |
... |
1 |
1 |
1 |
|
1 |
1 |
|
С помощью таблицы легко убедиться в справедливости |
||||||||||
следующих |
|
= min |
, |
,… |
, |
|
|
соотношений: |
|||
|
= ∏ |
|
|
= 1− |
|
||||||
∏ |
(1− |
) = max |
, |
,…, . |
|
|
|
|
|
||
Часто оказывается целесообразным наряду с булевой переменной х рассматривают и ее отрицаниепеременную ̅, которая оказывается определенной в той же области значений, что и x; при этом в силу определения ̅реализации х и ̅ никогда не совпадают. В нашем случае ̅= 1− , поскольку реализация булевых переменных есть числа 0 и 1 [52].
4.4.2. Булевы функции работоспособности системы и схемы расчета надежности
Для некоторых классов систем структурную функцию работоспособности S(x)=S( , …, ) можно вычислить
77
достаточно просто. Мы будем наряду с функцией работоспособности системы рассматривать также и
структурную функцию отказа системы |
(x),определяемую как |
|||
x |
|
x |
x), |
(4.33) |
(x)=1-S( ) или |
( )=1- |
̅( |
|
|
Оба определения по |
формуле являются эквивалентными. |
|||
|
̅ |
̅ |
|
|
Существуют 2 класса систем. |
|
|
|
|
Для первой системы имеем: |
|
|
|
|
-работоспособна только тогда ,когда все n |
ее элементов |
|||
работоспособны. Функция работоспособности имеет вид в
таком случае: |
|
|
|
∏ |
, (4.34) |
|
|
-̅ |
=1- |
||||
|
(x)=min( , …, )= |
|
|
= |
|
|
|
система отказывает, когда хотя бы один из ее n |
|||||
элементов отказывает. Для функции отказа отсюда следует: |
||||||
|
|
=1- |
|
|
= 1 −∏ |
, (4.35) |
)=max( , …, )= |
|
|
|
|||
̅(x |
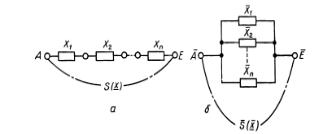
Графически подобную можно представить как систему с |
|||||
последовательным соединением |
х элементов или |
|
||||
|
параллельнымсоединением |
−−хэлементов соответственно. |
||||
Рис. 4.4. Последовательное и параллельное соединение элементов
Буквы А и Е илиА и Е символически обозначают вход и выход системы [52].
Для второй системы имеем:
-система работоспособна, когда работоспособен хотя бы один из ее элементов. Для функции работоспособности отсюда
следует: |
|
|
|
|
̅(x)=max( , …, )= |
= |
1 −∏ |
, |
(4.36) |
|
78 |
|
|
|
|
-система отказывает только тогда, когда отказывают все n |
|||||
элементов. Для функции отказа отсюда следует: |
|
||||||
|
|
̅ |
)=1- |
= |
|
, |
(4.37) |
|
|
(x)=min( , …, |
|
||||
|
|
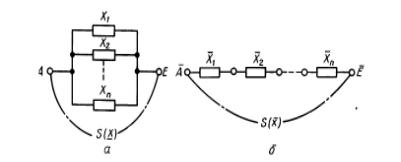
Графически подобную можно представить как систему с |
|||||
последовательным |
|
|
∏ |
|
соединением |
||
х |
− |
|
. |
|
|
|
− |
|
|
хэлементов или параллельным соединением |
|
||||
элементов соответственно
Рис. 4.5. Последовательное и параллельное соединение элементов
4.4.3. Свойства и представления булевых функций работоспособности систем.
Реализацию х' булева вектора х будем называть путем но работоспособности системы, если S (х') = 1. Реализацию х' булева вектора х будем называть сечением по работоспособности системы, если S(х')=0. Соответственно этому реализация х' булева вектора х называется сечением по
̅'
отказу системы, если (х) = 0. Реализация х' булева вектора х
̅'
называется путем по отказу системы, если (х) =1 [52]. Особое значение имеют так называемые минимальные
пути и минимальные сечения. Реализация х' булева вектора х называется минимальным путем по работоспособности системы, если S(х') =1, но для любой реализации х'', такой, что х'' < х', функция S(х") = 0. Реализация х' булева вектора х называется минимальным сечением по работоспособности системы, если S(х') =0, однако для любой реализации х", такой,
79
что х">х', функция (х') *= 1. Реализация х′ называется
минимальным сечением по отказу системы, если (х′) = 0,
однако для любой реализации х", такой, что х" > х′, функция
(х") = 1. Реализация х′ булева вектора х называется
минимальным путем по отказу системы, если (х′) =1, однако
для любой реализации х" такой, что х" < х" функция S(х") =0. Можно непосредственно проверить, что всякий
минимальный путь (минимальное сечение) по работоспособности оказывается дополнением минимального сечения (минимального пути) по отказу и наоборот. Обозначим общее число минимальных путей и сечений по работоспособности через m и s, а общее число минимальных путей и сечений по отказу — через и ̅. Тогда =s, ̅= m. Знание всех минимальных путей и минимальных сечений позволяет непосредственно получить аналитические выражения для функции работоспособности и отказа системы. Под эквивалентной схемой минимального пути
(эквивалентной схемой дополнения минимального сечения x ) будем понимать последовательное (параллельное) соединение тех компонентов вектора х, которые представлены
вединицами (в x нулями) [52].
Теорема 1а [52]. Эквивалентную схему работоспособности системы можно представить в виде параллельного соединения эквивалентных схем всех
минимальных путей по |
работоспособности, |
при |
этом, если |
||||
|
|
минимальные пути по работоспособности и |
|||||
x (σ = 1,…,s̅= m) |
|
|
|
|
|
||
( |
= 1,…, |
)− -минимальные сечение по отказу, функция |
|||||
работоспособности системы имеет вид: |
x ) |
|
|
||||
|
S x = |
x = 1 − (1 − |
], |
(4.38) |
|||
|
|
= 1 − |
[1 − |
(1− x ) |
|||
80