Материал: Средства и способы автоматизации производственных процессов
Средства и способы автоматизации производственных процессов
Содержание
Определения
Обозначения и сокращения
Введение
. Автоматический технический контроль
.1 Централизованное дистанционное управление
.2 Автоматическое регулирование и управление
1.3 Автоматизация ТО
2. Принципиальная схема и описание работы прибора ЭРП-61
2.1 Регулирование температуры при тепловлажностной обработке железобетонных изделий
. Схема контроля и регулирования температуры в камере ямного типа
.1 Измерители расхода
.2 Аппаратура для измерения давлений и разрежений
3.3 Устройство контроля расхода топливной смеси (пара)
.4 Устройство контроля мощности (тока)
.5 Устройство контроля температуры воздуха
.6 Автоматическое регулирование
.7 Дистанционное управление
.8 Сигнализаторы давления
3.9 Кнопки управления
3.10 Переключатели управления
.11 Измерители температуры
. Расчет шнекового смесителя
.1 Выбор электродвигателя
.2 Срок службы шнекового смесителя
Заключение
Список литературы
Определения
Автомат - устройство, которое по заданной программе без участия человека выполняет операции производственного цикла по получению, передаче, преобразованию и использовании энергии материала, информацию и нуждается лишь в контроле и наладке человеком.
Полная автоматизация - это высшая ступень автоматизации, предусматривается передача всех функций управления производством и контроля над ними.
Тензодатчик - это измерительный преобразователь в виде тензорезистора сопротивление которого изменяется под слиянием деформации тела на которое закреплен тензорезистор.
Счетчик - прибор, измеряющий
количество вещества или суммарный расход ( л, м, кг, т). Расходомер - прибор,
измеряющий количество вещества, протекающего по трубопроводу в заданный момент
времени.
Обозначения и сокращения
Р1 - регулятор температуры;
ИМ - исполнительный механизм;
Г - генератор;
М - двигатель.
Т - температура;
Р - давление; число оборотов в минуту;
W - вязкость;
V - скорость;
А - разность значений двух величин.
Введение
На реконструируемых действующих предприятиях и новых заводах внедряются современные высокопроизводительные машины и механизмы, полностью механизируются основные технологические процессы. Транспорт материалов полностью механизирован путем применения для кусковых материалов ленточных пластинчатых и скребковых транспортеров, для порошкообразных материалов - пневмовинтовых и камерных насосов, для транспорта шлама- мощных центробежных насосов.
Автоматизация основных производственных процессов обеспечит дальнейший рост производительности труда, позволит уменьшить расход топлива и электроэнергии, повысить однородность и качество цемента. Последнему обстоятельству уделяется особое внимание.
Ориентировочные подсчеты показывают, что стабилизация технологических процессов, достигаемая путем автоматизации, позволит на ряде заводов повысить качество.
Автоматизация производственных
процессов на предприятиях строительной промышленности развивается в следующих
основных направлениях
1. Автоматический технический
контроль
.1 Централизованное
дистанционное управление
Автоматический технологический контроль - наиболее распространенный вид автоматизации. Наряду с такими величинами, главным образом физическими, как давление жидкостей и газов, расход кусковых материалов, жидкостей и газов, уровень жидкостей, температура жидкостей и газов и др., контроль которых обеспечивается приборами общепромышленного назначения, имеется ряд величин, требующих особых методов измерения и создания специальных автоматических приборов.
В зависимости от характера и значения контролируемых величин применяются только показывающие или одновременно показывающие и регистрирующие (или интегрирующие) приборы. Приборы, контролирующие главнейшие технологические параметры устанавливаются на центральных щитах соответствующих агрегатов, на которых смонтированы также органы дистанционного управления, позволяющие устранять возникшие отклонения этих параметров. Приборы, контролирующие вспомогательные параметры, устанавливаются обычно по месту измерения. Они снабжаются контактными устройствами, подающими на центральный пост сигнал (световой и звуковой) о возникшем ненормальном отклонении контролируемого параметра от заданного значения. Автоматическая сигнализация отклонения от заданных величин применяется часто и для тех параметров, контроль за которыми вынесен на центральный щит.
Централизованное дистанционное управление электроприводами основных, вспомогательных и транспортных механизмов, а также регулирующими и переключающими органами (дроссельными заслонками и шиберами на газоходах, переключателями на пневмопроводах, шламовыми задвижками, переключателями на течках, сбрасывающими ножами на транспортерах и т. п.)
Сюда могут быть отнесены также
простейшие устройства релейной автоматики, например автоматическое включение
резервных маслонасосов или резервных транспортеров. Неотъемлемыми частями
централизованного управления являются автоматическая предпусковая сигнализация,
электрическая блокировка взаимосвязанных механизмов, фиксирующая очередность их
пуска и остановки и автоматическая аварийная сигнализация. Последняя
сигнализирует о самопроизвольной остановке механизмов и ненормальностях,
возникших в схеме управления; Она, как правило, объединяется с сигнализацией
отклонений технологических параметров в единую систему с общим устройством для
снятия звукового сигнала. На центральных щитах, где сосредоточены органы
управления, монтируется также автоматическая сигнализация, фиксирующая
состояние отдельных механизмов (включен или отключен), положение переключающих
органов (открыт или закрыт) и степень открытия регулирующих органов.
.2 Автоматическое регулирование
и управление
На отдельных производственных
участках, в местах, удобных для визуального наблюдения за работой основных
механизмов, располагаются центральные посты управления, на которых
устанавливаются приборы автоматического контроля, управления и регулирования
соответствующего участка. Общий контроль и управление производственным
процессом, в целом часто осуществляются главным диспетчером завода.
Диспетчерский пункт оснащается автоматической сигнализацией, контролирующей
состояние главнейших механизмов, и счетчиками числа часов их работы, а также
регистрирующими приборами контроля важнейших технологических параметров.
1.3 Автоматизация ТО
Полномасштабная АСУ ТО, включающая систему
автоматического регулирования (САР), систему блокировок и защит. АСУ ТО
осуществляет информационное обеспечение работы оперативного персонала,
специалистов и руководителей, автоматическое управление работой оборудования,
дает возможность задавать параметры автоматического режима. Для отображения
текущей информации используются операторские панели текстовые, либо
графические. Обеспечивается возможность передачи данных по компьютерным сетям.
Основной задачей оператора является контроль и наблюдение за работой
оборудования.
2. Принципиальная схема и описание работы
прибора ЭРП-61
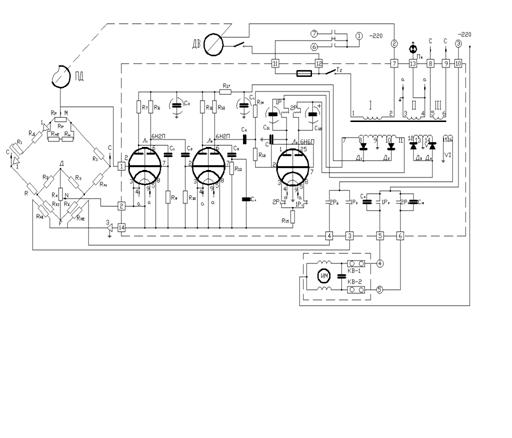
Описание работы ЭРП-61. На рис.1 дана принципиальная схема прибора ЭРП-61 с подключённым термометром сопротивления Rt и исполнительным механизмом ИМ.
Измерительная схема представляет собой автоматически уравновешивающийся мост. Верхняя часть моста содержит сопротивление термометра с подгоночным сопротивлением RД, сопротивление R1, реохорд с шунтом Rш и добавочным сопротивлением (для настройки прибора) Rп2.
Нижняя часть моста состоит из дополнительного мостика, составленного из сопротивлений R2, R3, Rk1, Rk, регулировочных сопротивлений Rп1 , R* и переменного сопротивления R4, включённого в диагональ дополнительного мостика. Измерительная схема питается переменным током от обмотки III силового трансформатора при напряжении 1,3 в (вершины С - С).
Сигнал измерительной схемы, снимаемый с точек М и Д, представляет собой сумму двух э. д. с.: небаланса основного моста (э. д. с. между точками М и Д) и дополнительного мостика (между точками N и Д). Сопротивления Rk1 и Rk намотаны медным проводом и имеют электрические нагреватели Rн1 и Rн2, подключаемые к обмотке VI силового трансформатора одновременно с исполнительным механизмом ИМ. Если температура датчика равна заданной, т. е. соответствует положению движка М на реохорде Rр, то оба моста сбалансированы и напряжение, подаваемое на вход усилителя, равно нулю. Когда температура датчика отклонится от заданной (например, увеличится), на вход усилителя поступит сигнал UMD, вызывающий срабатывание реле 1Р. Реле 1Р включит одновременно исполнительный механизм и нагреватель Rн1. В результате нагрева сопротивления Rk1 на измерительной диагонали дополнительного мостика появляется напряжение UND. Это напряжение направлено встречно напряжению UMD. Следовательно, при равенстве UND и UMD напряжение на входе усилителя станет равным нулю и исполнительный механизм ИМ остановится раньше, чем температура датчика примет заданное значение. Если после остывания сопротивления Rk1 температура датчика будет отличаться от заданной, цикл повторяется. Таким образом, дополнительный мостик вводит в процесс регулирования предварение. Сопротивления Rk1 и Rk2 с нагревателями являются электрическими (тепловыми) изодромными устройствами.
Степень воздействия дополнительного мостика можно менять, передвигая движок сопротивления R4. При перемещении движка в точку Д степень воздействия дополнительного мостика равна нулю. При перемещении движка сопротивления R4 в другое крайнее положение (точка F) компенсируется небаланс основного моста в пределах до 15% диапазона регулирования. Осуществление заданной программы производится движком реохорда Rр, который приводится в движение с помощью кулачка-лекала ПД от двигателя ДВ. Усилительный тракт состоит из четырёх каскадов усиления по напряжению, собранных по обычной схеме усилителя на сопротивлениях с ёмкостными связями и выходного фазочувствительного каскада усиления мощности. Сигнал, снимаемый с анода третьего каскада, подаётся на сетку четвёртого каскада усилителя напряжения через делитель R1 3, который выполняет функцию регулятора чувствительности. Переменная составляющая анодного тока 4-го каскада через конденсатор С6 поступает на сетки (соединённые накоротко) выходного каскада мощности.
Анодные цепи обеих половин лампы выходного каскада питаются переменным напряжением от обмотки IV силового трансформатора и находятся в противофазе. В цепи анодов включены обмотки выходных реле, зашунтированные конденсаторами. На сетки выходной лампы подаётся напряжение смещения от обмотки V силового трансформатора через диоды Д3.
Это смещение обеспечивает запирание обоих половин ламп при отсутствии сигнала. При поступлении входного сигнала сработает та половина лампы фазы анодного напряжения, который будет совпадать с фазой сигнала. Работа остальных элементов регулятора ясна из схемы.
автоматический железобетонный температура шнековый
2.1 Регулирование температуры при
тепловлажностной обработке железобетонных изделий
Тепловлажностная обработка деталей производится в пропарочных камерах, автоклавах, туннельных и ямных камерах. В некоторых случаях применяют электрический прогрев деталей, подключая напряжение к арматуре и форме и пропуская ток через бетонную массу. Схема прибора ЭРП-61 с подключённым термометром сопротивления Rt и исполнительным механизмом ИМ.
Измерительная схема представляет собой автоматически уравновешивающийся мост. Верхняя часть моста содержит сопротивление термометра с подгоночным сопротивлением RД, сопротивление R1, реохорд с шунтом Rш и добавочным сопротивлением (для настройки прибора) Rп2.
Измерительная схема питается переменным током от обмотки III силового трансформатора при напряжении 1,3 в (вершины С - С).
Сигнал измерительной схемы, снимаемый с точек М и Д, представляет собой сумму двух э. д. с.: небаланса основного моста (э. д. с. между точками М и Д) и дополнительного мостика (между точками N и Д).
Сопротивления Rk1 и Rk намотаны медным проводом и имеют электрические нагреватели Rн1 и Rн2, подключаемые к обмотке VI силового трансформатора одновременно с исполнительным механизмом ИМ.
Если температура датчика равна заданной, т. е. соответствует положению движка М на реохорде Rр, то оба моста сбалансированы и напряжение, подаваемое на вход усилителя, равно нулю.
Когда температура датчика отклонится от заданной (например, увеличится), на вход усилителя поступит сигнал UMD, вызывающий срабатывание реле 1Р. Реле 1Р включит одновременно исполнительный механизм и нагреватель Rн1.
В результате нагрева сопротивления Rk1 на измерительной диагонали дополнительного мостика появляется напряжение UND. Это напряжение направлено встречно напряжению UMD. Следовательно, при равенстве UND и UMD напряжение на входе усилителя станет равным нулю и исполнительный механизм
ИМ остановится раньше, чем температура датчика примет заданное значение. Если после остывания сопротивления Rk1 температура датчика будет отличаться от заданной, цикл повторяется.
Таким образом, дополнительный мостик вводит в процесс регулирования предварение. Сопротивления Rk1 и Rk2 с нагревателями являются электрическими (тепловыми) изодромными устройствами.
Степень воздействия дополнительного мостика можно менять, передвигая движок сопротивления R4. При перемещении движка в точку Д степень воздействия дополнительного мостика равна нулю. При перемещении движка сопротивления R4 в другое крайнее положение (точка F) компенсируется небаланс основного моста в пределах до 15% диапазона регулирования.
Осуществление заданной программы производится движком реохорда Rр, который приводится в движение с помощью кулачка-лекала ПД от двигателя ДВ.
Усилительный тракт состоит из четырёх каскадов усиления по напряжению, собранных по обычной схеме усилителя на сопротивлениях с ёмкостными связями и выходного фазочувствительного каскада усиления мощности. Сигнал, снимаемый с анода третьего каскада, подаётся на сетку четвёртого каскада усилителя напряжения через делитель R1 3, который выполняет функцию регулятора чувствительности. Переменная составляющая анодного тока 4-го каскада через конденсатор С6 поступает на сетки (соединённые накоротко) выходного каскада мощности.
Анодные цепи обеих половин лампы выходного каскада питаются переменным напряжением от обмотки IV силового трансформатора и находятся в противофазе.
В цепи анодов включены обмотки выходных реле, зашунтированные конденсаторами.
На сетки выходной лампы подаётся напряжение смещения от обмотки V силового трансформатора через диоды Д3.
Это смещение обеспечивает запирание обоих половин ламп при отсутствии сигнала.
При поступлении входного сигнала сработает та половина лампы фазы анодного напряжения, который будет совпадать с фазой сигнала.
Работа остальных элементов регулятора ясна из схемы.
Схема контроля и авторегулирования тепловых процессов в кассетах.
При регулировании температуры в пропарочных камерах и кассетах приходится измерять температуру и воздействовать на регулирующие органы одновременно во многих объектах, так как на заводе железобетонных изделий может находится в работе несколько десятков камер и кассет.