Материал: Система автоматического управления электроприводом пассажирского лифта
Индуктивность при мостовой силовой
схеме тиристорного преобразователя:
![]()
Определим ЭДС холостого хода:
![]()
где Kсх - схемный коэффициент (Kсх = 2,34 для трехфазной мостовой схемы).
Определим ЭДС под нагрузкой:
![]()
Определим угол управления
тиристорами:
![]()
Определим амплитуду первой гармоники
напряжения на нагрузке:
Определим необходимое значение индуpктивности на
стороне выпрямленного тока:

где q- коэффициент пульсаций (q = 0,15 для трехфазной мостовой схемы).
Определим требуемую индуктивность
сглаживающего реактора:
![]()
Так как требуемая индуктивность сглаживающего реактора оказалась отрицательной, то сглаживающий реактор не требуется.
Определим постоянную времени якорной
цепи:
 .
.
Для обеспечения ограничения
ускорения и рывка рассчитаем задатчик интенсивности. Принципиальная схема
задатчика интенсивности приведена на рис.2.
Рис.2. Электрическая схема задатчика
интенсивности
Принимаем сопротивления:
R1=10 кОм; R6=10 кОм;
R2=10 кОм; R7=10 кОм;
R3=10 кОм; R8=10 кОм.
R4=10 кОм;
R5=10 кОм;
Рассчитаем KDA4
:
![]()
Определим требуемые ускорения и рывок:
![]() ,
,
![]() .
.
где a - допустимое ускорение, a = 1,2 м/с2;
r - допустимый рывок, r = 4 м/с3.
Определим коэффициент обратной связи по
скорости:
![]() .
.
где Uзс - напряжение задания требуемой скорости (w = 91,106 рад/с),
Uзс = 5 В.
Для ограничения сигнала обратной связи выбираем стабилитроны серии КС107А с напряжением стабилизации Uст = 0,7 В.
Определим постоянную времени TDA5:
![]() .
.
Определим емкость конденсатора С2:
![]() .
.
Принимаем С2 = 24 мкФ.
Определим постоянную времени TDA3:
![]() .
.
![]() .
.
Рассчитаем KDA2 :
![]() .
.
Определим сопротивление резистора R9:
![]() .
.
Принимаем R9
= 13 кОм.
. Разработка структуры САУ
Для электропривода лифта выбираем систему регулирования скорости с частыми пусками, торможением и реверсом в виде однозонной двухконтурной системы автоматического управления скорости с подчиненным контуром тока, обеспечивающую высокое быстродействие и достаточно высокие статические показатели. Наличие внутреннего подчиненного контура тока необходимо для улучшения качества переходных процессов и для уменьшения динамической ошибки. Система автоматического управления содержит обратную связь по скорости, реализованную при помощи тахогенератора, и обратную связь по току, реализованную при помощи датчика тока якоря.
Структурная схема системы автоматического
управления представлена на рис.3.
Рис.3. Структурная схема однозонной
двухконтурной системы автоматического управления скоростью с подчиненным
контуром тока
На входе системы автоматического управления для ограничения ускорения и рывка устанавливается задатчик интенсивности. Величину напряжения тока Uзт принимаем равной 5 В.
Коэффициент обратной связи по току:
![]() .
.
Определим постоянную времени
тиристорного преобразователя:
![]() .
.
Определим ЭДС под нагрузкой при
требуемой скорости:
![]()
Определим угол управления тиристорами при требуемой скорости:
![]()
Определим напряжение управления
тиристорами при требуемой скорости:
![]() ,
,
где Uпоmax -максимальное опорное напряжение, Uпоmax = 8 В.
Определим коэффициент передачи тиристорного
преобразователя:
 .
.
Определим коэффициент влияния
сетевого напряжения:
![]() .
.
Так как датчики скорости (тахогенератор встроенный в двигатель) и тока (трансформаторы тока) обладают малой инерционностью, то их постоянные времени Tдс и Tдт принимаем равными нулю.
Структурная схема задатчика интенсивности
представлена на рис.4.
Рис.4. Структурная схема задатчика
интенсивности
. Синтез системы автоматического
управления
Синтезируем регулятор тока по
структурной схеме контура тока, представленной на рис. 5.
Рис.5. Структурная схема контура
тока
Расчет регуляторов будем вести для минимального момента инерции механизма J = JΣmin = 3,278 кг·м2, так как при расчете регуляторов для заниженного момента инерции переходные процессы будут апериодические, а при расчете регуляторов для завышенного момента инерции - колебательные.
Определим малую постоянную времени
контура тока:
![]() .
.
Определим электромеханическую
постоянную времени:
![]() .
.
Проверим условие пренебрежения внутренней обратной связью по ЭДС ([4], с.17):
м>20·TmI,
,176 с >0,067 с.
Так как условие пренебрежения
внутренней обратной связью по ЭДС выплняется, то для настройки на технический
оптимум в качестве регулятора тока необходим ПИ- регулятор:
 ,
,
![]() ,
,
 .
.
Определим ограничение регулятора
тока для и исключения возможности превышения максимального напряжения
управления преобразователем ([4], с.22):
![]() .
.
Для синтеза внешнего контура скорости контур тока заменяется эквивалентным апериодическим звеном:
![]() .
.
С учетом замены контура тока якоря
эквивалентным звеном структурная схема контура скорости при двухконтурном
якорном канале системы управления, будет иметь вид, представленный на рис.6.
Рис.6. Структурная схема контура
скорости
Определим малую постоянную времени
контура тока:
![]() .
.
Для настройки на технический оптимум
необходим П-регулятор:
 .
.
Определим ограничение регулятора
скорости ([4], с.22):
![]() .
.
Рассчитаем параметры электрической
схемы регулятора тока представленной на рис. 7.
Рис.7. Электрическая схема
регулятора тока
Принимаем емкость конденсатора C3 равной 1 мкФ.
Определим сопротивление резисторов R11 и R10:
![]() ,
,
 .
.
Принимаем R11 = 18 кОм и R10 = 82 кОм.
Для ограничения выходного сигнала регулятора тока будем использовать стабилитроны серии КС170A с напряжением стабилизации
Uст = 7 В и прямым падением напряжения Uпр = 0,7 В.
Определим максимальное выходное напряжение
регулятора тока:
![]() .
.
Рассчитаем параметры электрической схемы
регулятора скорости представленной на рис. 8.
Рис.8. Электрическая схема регулятора скорости
Принимаем сопротивление резистора R12 равной 1 кОм.
Определим сопротивление резисторов R13:
![]() .
.
Принимаем R13 = 110 кОм.
Для ограничения выходного сигнала регулятора скорости будем использовать стабилитроны серии КС191Ф с напряжением стабилизации
Uст = 9,1 В и прямым падением напряжения Uпр = 0,7 В.
Определим максимальное выходное напряжение
регулятора скорости:
![]() .
.
. Анализ статических показателей
Структурная схема контура скорости свернутого
относительно момента изображена на рис. 9.
Рис.9. Структурная схема контура скорости
относительно момента
Для получения значения статической ошибки
контура по моменту сопротивления найдем передаточную функцию замкнутого контура
скорости по возмущению:

Определим величину статической
ошибки при номинальном моменте:
![]() .
.
Определим величину относительной
статической ошибки:
 .
.
Сравнивая относительную статическую ошибку с требованиями, предъявляемыми к электроприводу, можно заключить, что синтез произведен верно и требуемая жесткость характеристик обеспечена.
Допустимая величина отклонения скорости при скачке момента от нуля до номинального значения не превышает 10% от установившегося значения, следовательно переход к настройке на симметричный оптимум не требуется.
Определим величину пониженной
скорости:
![]() ,
,
где ΔL-точность остановки, ΔL = 0,025 м.
Определим величину угловой пониженной скорости:
![]() .
.
Определим величину напряжения задания пониженной
скорости:
![]() .
.
Статические характеристики системы
электропривода на рабочей и пониженной скорости представлена на рис.10.
Рис. 10. Статические характеристики системы
электропривода
. Анализ динамики электропривода
Анализ динамики системы автоматического управления электроприводом пассажирского лифта заключается в построении переходных процессов и определении по ним основных динамических показателей системы (перерегулирование, время переходного процесса).
Расчет переходных процессов произведем в программе Matlab в приложении Simulink.
Структурные схемы системы автоматического
управления электроприводом пассажирского лифта, регуляторов скорости и тока,
задатчика интенсивности, построенные в программе Matlab,
изображены на рис. 11, рис. 12, рис. 13 и рис. 14.
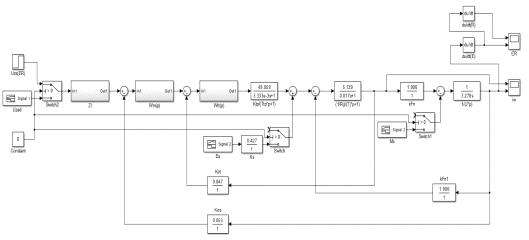
Рис.11. Фрагмент программы Matlab: структурная
схема системы автоматического управления электроприводом пассажирского лифта
Рис.12. Фрагмент программы Matlab: регулятор
скорости, синтезированный на технический оптимум
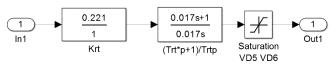
Рис.13. Фрагмент программы Matlab: регулятор
тока, синтезированный на технический оптимум
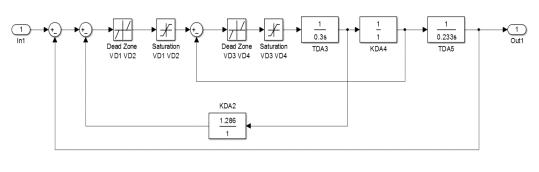
Рис.14. Фрагмент программы Matlab: задатчик
интенсивности
Построим переходные процессы тока якоря
двигателя i(t) (рис. 15) и
угловой скорости двигателя ω(t)
(рис. 16) согласно таблице 4.
Таблица 4
Параметры для расчета переходных процессов
|
№ |
Процесс, величина изменяемого сигнала |
Начальные условия |
|
1 |
По управлению, uзс=0,01· Uзс |
Нулевые |
|
2 |
По моменту сопротивления, Мс=0,01· Мн |
П.1 |
|
3 |
По напряжению сети, Uс=0,01· U2нф |
П.2 |
|
4 |
Пуск на холостом ходу, uзс=Uзс, Мс=0,1· Мн |
П.3 |
|
5 |
По моменту сопротивления, Мс=Мн |
П.4 |
|
6 |
По напряжению сети, Uс=0,1· U2нф |
П.5 |
Переходные процессы будем строить в виде
циклограмм, время каждого цикла возьмем равным 5 с.
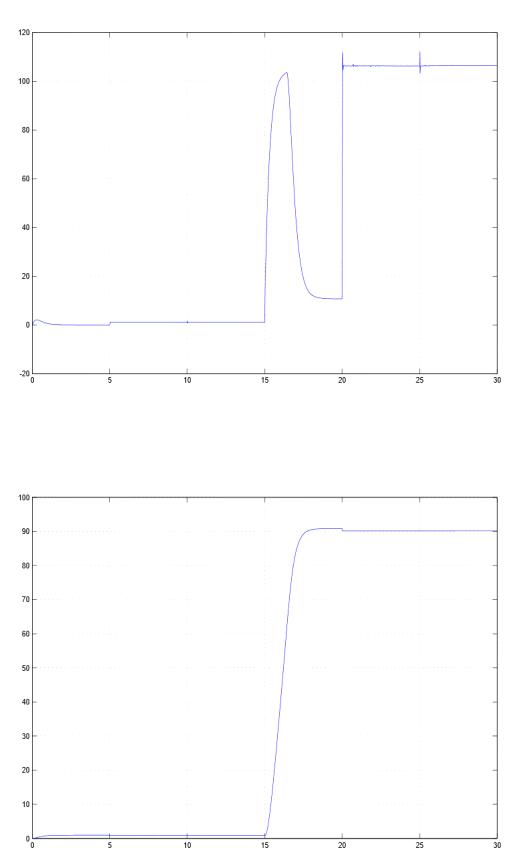
Рис.15. Переходные процессы тока якоря i(t)
Рис.16. Переходные процессы угловой скорости
двигателя ω(t)
Построим переходной процесс реакции задатчика
интенсивности на скачок напряжения величиной 5 В (рис. 17).
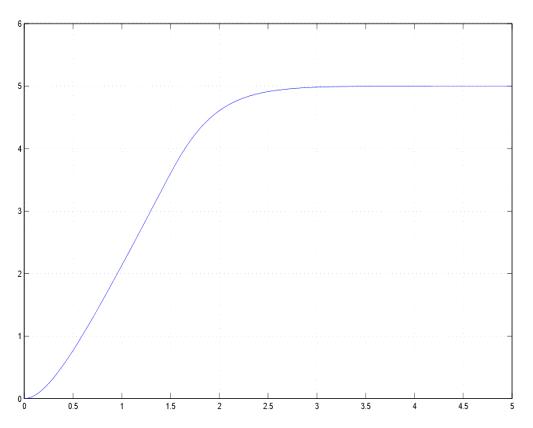
Рис.17. Переходной процесс реакции задатчика
интенсивности на скачок напряжения величиной 5 В
Задатчик интенсивности в данном случае ограничивает ускорение и рывок при пуске, поэтому время пуска двигателя затянуто до 3 с, а перерегулирование из-за плавного нарастания напряжения задания скорости отсутствует.
Переходные процессы тока якоря двигателя i(t) и угловой скорости двигателя ω(t) отдельно на каждом участке представлены на рис.18 - рис.29.
Переходные процессы показывающие ограничение
рывка и ускорения при набросе номинального сигнала задания скорости
представлены на рис.30 - рис.31.