Материал: Синтез регулятора скорости
Рис. 26. Графики ω(t),
i(t)
при минимальном шаге прерывания (T
= 0.5∙Tм)
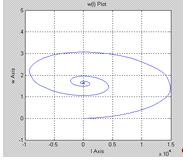
Рис. 27. График электромеханической характеристики
(T
= 0.5∙Tм)
Построим графики переходных процессов в случае T
= 5∙minTм:
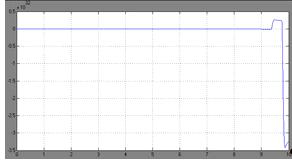
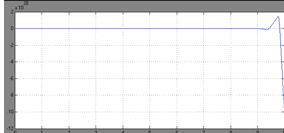
Рис. 28. Графики ω(t),
i(t)
при максимальном шаге прерывания (T
= 5∙Tм)
Глядя на графики, можно сказать, что при большом периоде прерывания экстраполятора имеет место нарастающий колебательный переходный процесс.
Поэтому будем оценивать качество переходных процессов при минимальном T для этой цифровой системы.
Определим перерегулирование σ
и
время регулирования tр
по
графику ω(t).
На вход системы поставим фильтр:
![]() ,
,
где Tф = 0.9 с.
Схема модели приведена ниже:
Рис. 29. Схема модели для
определения σ
и
tр по графику ω(t)
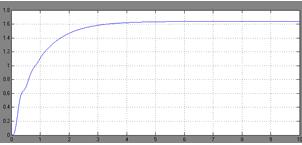
Рис. 30. График ω(t)
(T
= 0.5∙Tм)
При минимальном шаге прерывания T = 0.5∙Tм, Tф (постоянная времени фильтра) = 0.071 с было получено время регулирования tр = 2,5 с.
Перерегулирование
![]() , по показаниям осциллографа:
, по показаниям осциллографа:![]()
Получаем сравнительно лучшее быстродействие tр и допустимое перерегулирование σ.
Теперь построим график тока i(t) при
использовании фильтра:
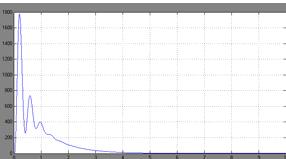
Рис. 31. График i(t) (T = 0.5∙Tм) с фильтром
На следующем этапе исследований подадим
возмущающее воздействие Iс/p
и посмотрим графики ω(t),
i(t).
Для начала представим график ω(t):
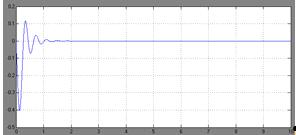
Рис. 32. График ω(t)
при (T = 0.5∙Tм)
отработке возмущающего воздействия
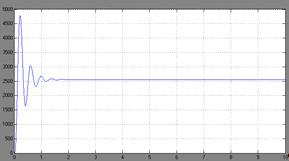
Рис. 33. График i(t) при T = 0.5∙Tм
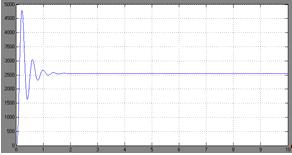
Рис. 34. График i(t)
при T = 0.5∙Tм.
с фильтром
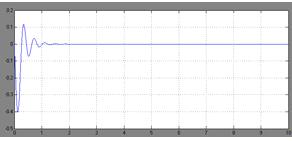
Рис. 35. График w(t) при T = 0.5∙Tм. с фильтром
Теперь подадим на вход САУ помеху и построим
графики: i(t),
ω(t), ω(i):
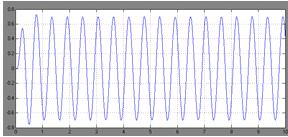
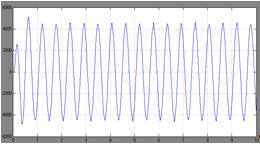
Рис. 36. Графики ω(t),
i(t)
при (T = 0.5∙Tм)
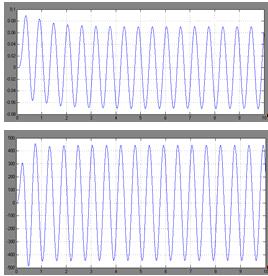
Рис. 37. Графики ω(t), i(t) при (T = 0.5∙Tм) с фильтром
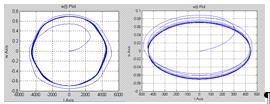
Рис. 38 Графики ω(i), при (T = 0.5∙Tм), без фильтра и с фильтром
Определим значение приближенного
коэффициента передачи на основной гармонике, используя
численный эксперимент. Подадим на вход системы основную гармонику (рис. 6.15) h(t)
= 0.09∙sin14ωt:
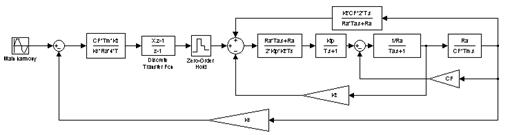
Рис. 39. Схема опыта (T
= 0.5∙Tм)
Амплитудное значение основной гармоники на входе
мы знаем: Gm
= 0.09 рад/с. Представим график входного и выходного сигналов (рис. 6.16):
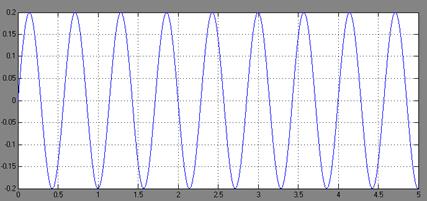
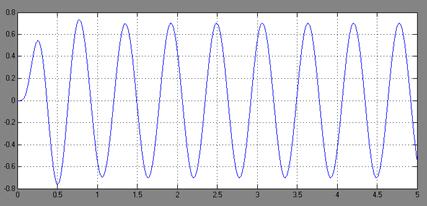
Рис. 40. Основная гармоника на входе и выходе
системы
По графику видно, что сигнал на выходе (жирная линия) имеет большую амплитуду, система усиливает помеху. Используя масштабирование, найдем Rm = 0,5, тогда Kо = Rm/Gm, Kо = 0,5/0,2 = 2,5.
Построим ЛАЧХ замкнутой цифровой системы с помощью Matlab 6.5. Пропишем условие, необходимое для ее построения:
= logspace(0,6)
[A,B,C,D] = dlinmodv5('Название документа модели');
W = ss(A,B,C,D,Q);(W)
Здесь Q
- период прерывания экстраполятора. Нажимаем клавишу Enter:
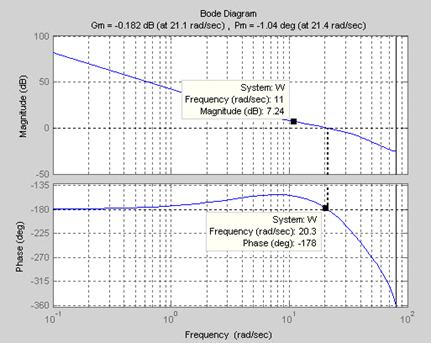
Рис. 41. ЛАЧХ замкнутой системы
По графику было найдено:![]() Мы знаем,
что формула для расчета ЛАЧХ выглядит так:
Мы знаем,
что формула для расчета ЛАЧХ выглядит так:
![]()
Передаточная функция W(ω) - это отношение выходного сигнала к сигналу на выходе, т.е. коэффициент передачи.
Поэтому выражение:![]() нужно
преобразовать:
нужно
преобразовать:
Таким образом, коэффициенты передачи на основной гармонике Ko, найденные двумя способами, практически совпадают.
Далее соберем модель исследуемой
цифровой системы, когда цифровой регулятор скорости получен при подстановке ![]() в исходный
аналоговый (рис. 6.19) и проведем исследования по уже знакомому порядку:
в исходный
аналоговый (рис. 6.19) и проведем исследования по уже знакомому порядку:
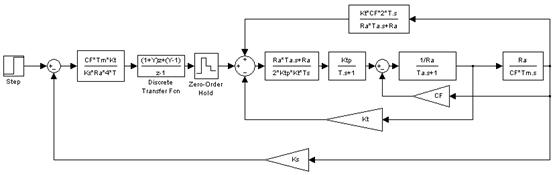
Рис. 42. Модель САУ, когда цифровой
регулятор получен из аналогового с помощью подстановки p = 2∙(z - 1)/T∙(z + 1)
Определим запасы устойчивости цифровой системы при билинейном преобразовании с помощью программы Matlab 6.5:
Из полученных графиков можно сделать вывод что система неустойчива.
Построим графики i(t),
ω(t)
при отработке единичного ступенчатого сигнала:
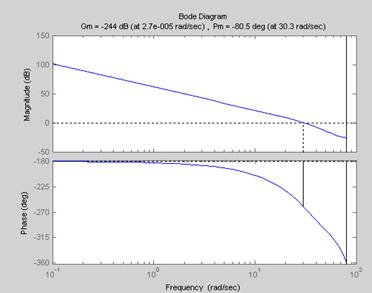
Рис. Устойчивость цифровой САУ при билинейном
преобразовании
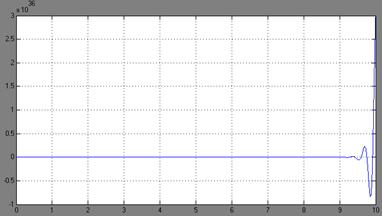
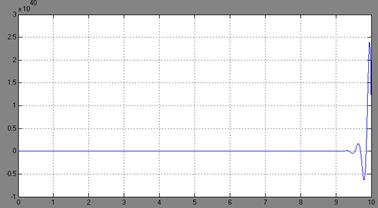
Рис. 43 Графики переходных процессов ω(t),
i(t)
при T = 0.5∙Tм
Шаг интегрирования Δt = 0.0001 c.
Приведем графики переходных процессов ω(t),
i(t),
когда период прерывания экстраполятора T
= 0,005∙Tм:
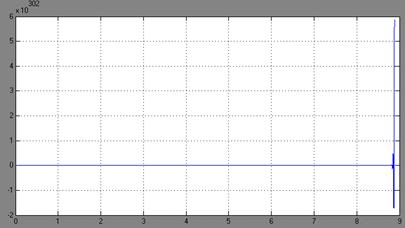
Рис. 44 Графики переходных процессов ω(t),
i(t)
при T = 0,005∙Tм
Дальнейшие исследования для этой цифровой системы проводить для считаем нецелесообразным поскольку для всех периодов прерывания будем получать расходящийся процесс.