Материал: Синтез регулятора скорости
Синтез регулятора скорости
1. Исходные данные для проектирования
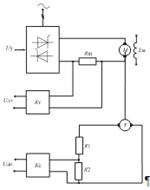
Рис. 1 Принципиальная схема заданной части
Таблица 1.1 Задание на курсовой проект
|
Тип двигателя |
П2-630-215 |
|
Порядок астатизма |
2 |
|
σ (перерегулирование) |
0.1 с |
|
tр - время регулирования |
0.04 с |
|
ΔL |
14 дБ |
|
Δφ |
π/4 |
|
Iс/Iн |
0,7 |
|
h(t) |
a1sinω0t + a2sina3ω0t |
|
a1 |
0,2 |
|
a2 |
0,05 |
|
ω0 |
11 рад/с |
|
a3 |
7 |
Таблица 1.2 Параметры двигателя П2-630-215
|
Номинальное напряжение, Uн |
930 В |
|
Мощность, P |
3150 кВт |
|
Ток, А |
3650 |
|
Частота вращения, (об/мин) |
90/150 |
|
Момент, кН∙м |
334,25 |
|
Динамический момент инерции, 103 кг·м2 |
13,63 |
|
Масса, 103 кг |
69,4 |
|
КПД, % |
92,5 |
2. Структурная схема заданной части
САУ
В качестве базового варианта рассматривается электропривод постоянного тока на основе двигателя постоянного тока с независимым возбуждением. Рассчитывается система однозонного регулирования скорости.
В качестве источника питания якорной цепи
рассматривается управляемый тиристорный выпрямитель, динамические свойства
можно описать передаточной функцией:
 (2.1)
(2.1)
Коэффициент передачи можно определить по
номинальному значению среднего выпрямленного напряжения Uтп,
н и соответствующему
максимальному напряжению Uу,
м на входе системы
импульсно-фазового управления:
 (2.2)
(2.2)
Uу, м = 10 В,
Uтп, н = 1050 В,
Kтп = 1050/10 = 105.
Постоянную времени выпрямителя
следует выбрать из условия ![]() с.
с.
Выберем Tμ = 0,02 c.
Система автоматизированного регулирования угловой скорости вращения вала двигателя может быть двух- или трехконтурной. В двухконтурной системе регулируемыми координатами являются ток якоря и скорость двигателя. В трехконтурной системе добавляется внутренний контур регулирования напряжения.
В курсовом проекте мы будем исследовать двухконтурную систему.
.1 Расчет датчика тока [4]
Первичная информация о величине тока якоря может быть получена как путем непосредственного измерения этого тока, так и путем измерения действующего значения фазового (линейного) тока на стороне переменного тока. При проектировании системы управления рассматривается вариант непосредственного измерения с помощью шунта, включаемого в якорную цепь мощного двигателя постоянного тока с большим Iн (см. рис. 2.2).
Шунты представляют собой калиброванные медные
сопротивления с малой величиной сопротивления.
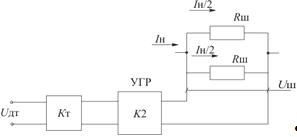
Рис. 2.1 Схема измерения тока
Шунты стандартизированы по номинальному току Iш, н и номинальному падению напряжения на сопротивлении шунта Uш, н.
Подберем шунт по величине номинального тока
двигателя Iн
исходя из условия:
![]() .(2.3)
.(2.3)
Номинальный ток якоря двигателя - Iн
=
3650 А. [5, c. 89].
Таблица 2.1
|
Тип шунта |
Uш,н, 10-3 В |
|
|
75ШСМ |
75 |
75, 100, 150, 200, 300, 500, 750, 1000, 4000, 7500 |
Измеренное с помощью шунта напряжение поступает на устройство гальванического разделения. Коэффициент передачи УГР датчика тока настраивается в диапазоне 53…133.
Назначим коэффициент датчика, исходя из условий:
Iн = 3650 А (номинальный ток якоря двигателя), λт = 2,5 (перегрузочная способность), тогда
Imax = 2,5∙3650 = 9125 А,
KТ ≤ 10/9125 ≈ 0,00109 Ом.
Принимаем KТ = 0,001 Ом.
Теперь следует определить коэффициент передачи
шунта:
![]() (2.4)
(2.4)
По данным таблицы 2.1 для выбранного шунта 75ШСМ:
Uш. н = 75∙10-3В,
Iш. н = 4000 А.
![]()
Вычислим K2
(УГР):
![]() (2.5)
(2.5)
![]() ,
,
Принимаем K2 = 53, тогда KТ = 0,000005∙53 = 0,0009937 Ом
Максимальное значение сигнала на выходе датчика тока
Uдт max = Kт∙Imax = 0,0009937 9125 = 9,0679 В.
Итак, Uдт max < 10 В, поэтому датчик рассчитан правильно.
.2 Расчет датчика скорости [5]
Обратная связь по угловой скорости вращения двигателя осуществляется с помощью тахогенератора постоянного тока.
Тахогенератор следует выбирать, исходя из условия ωтг. н ≥ ωmax, где ωтг. н - номинальная скорость тахогенератора, ωmax - максимальная скорость вращения двигателя в расчетном режиме.
Используя справочник [5],
найдем:
Таблица 2.2
|
Тип тахогенератора |
Скорость вращения |
Напряжение Uн. тг, В |
|
|
|
nн. тг, об/мин |
ωн. тг, рад/с |
|
|
ПТ-42 |
200 |
20,94 |
230 |
Поскольку номинальное напряжение тахогенератора существенно превышает допустимый уровень рабочего напряжения системы регулирования, к выходу тахогенератора подключается датчик напряжения.
Номинальная скорость вращения двигателя nн
=
90 об/мин,
![]()
![]()
Определим коэффициент передачи
тахогенератора:
![]()
Коэффициент обратной связи по
скорости (коэффициент датчика скорости) выбираем из условия:
![]() (2.6)
(2.6)
Получаем Kc = 0,63 Вб.
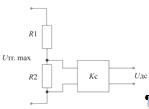
Рис. 2 Схема определения сигнала
обратной связи по скорости.
Определим наибольшее значение
напряжения, вырабатываемого тахогенератором:
![]()
Зададим значение сопротивления R2 = 3 кОм. Тогда величину сопротивления R1 можно определить из условия:
![]()
![]()
![]()
Принимаем ближайшее большее стандартное значение: R1 = 51 кОм [5, c. 91].
Уточняем коэффициент делителя
напряжения:
![]()
Определяем уточненное значение
обратной связи по скорости:
![]() .
.
Таким образом, наибольшее значение
сигнала обратной связи по скорости равно
![]()
и не превышает допустимое значение: 10 В.
.3 Определение параметров: СФн,
La, Ra двигателя
постоянного тока
Для двигателя подлежат определению значения
CФн, Lа,
Та,
где С - конструктивный коэффициент,
Фн - номинальный поток возбуждения,
Lа - индуктивность якорной цепи,
Tа - электромагнитная постоянная времени.
В том случае, когда значение Rа в паспортных данных двигателя отсутствует, можно использовать приближенную формулу:
где![]() - номинальное значение коэффициента
полезного действия.
- номинальное значение коэффициента
полезного действия.
Согласно паспортным данным двигателя: Uн = 930 В, Iн = 3650 А, η = 92,5 %.
![]()
Пересчитаем на нагретое состояние:
![]()
![]()
![]()
При отсутствии сведений о величине
индуктивности якорной цепи искомую величину можно определить по приближенному
выражению:
![]() (2.8)
(2.8)
где p - число пар полюсов (p = 4),
β = 0,25 при наличии компенсационной обмотки.
![]()
Электромагнитная постоянная времени
Tа есть отношение индуктивности Lа к сопротивлению Rа
якорной цепи:
Ta = La/Ra.
Ta = 3,048∙10-4/2.742∙10-3 = 0,136 с.
Значение CФн
можно определить из уравнения электромеханической характеристики двигателя для
номинального режима:
 (2.9)
(2.9)
Здесь Uн - номинальное значение напряжения на якоре, В; Iн - номинальное значение тока, А; ωн - номинальное значение угловой скорости вращения, рад/с.
![]()
Внесем уточнения в некоторые
параметры структурной схемы заданной части системы автоматического управления
ДПТ НВ.
Ra = Ra(д) + Rтр,
La
= La(д) + Lтр.
Ra(д) - активное сопротивление обмотки нагретого двигателя, Rтр - активное сопротивление понижающего трансформатора (нагретого).
La(д) - индуктивное сопротивление двигателя, Lтр - индуктивное сопротивление трансформатора.
2.3.1 Выбор комплектного электропривода
Комплектный электропривод выбирается, исходя из
того, что наиболее слабым звеном энергетической (силовой) части электропривода
является двигатель. Следовательно, при выборе комплектного электропривода
следует исходить из соотношений:
 (2.10)
(2.10)
где λтп - перегрузочная способность преобразователя; Iн, Uн - номинальные значения тока и напряжения двигателя; Iн. тп, Uн. тп - номинальные значения тока и напряжения преобразователя.
Тиристорные преобразователи большинства комплектных электроприводов постоянного тока имеют перегрузочную способность λтп = (2,25-2,5) при длительности перегрузки, не превышающей 10 с.
По таблице исходных данных для двигателя
постоянного тока (1.) подберем комплектный электропривод типа ТПП-1 мощностью
от 1000 до 13000 кВт, имеющий следующие номинальные данные:
Uн. тп = 1050 В, Iн. тп = 4000 А, λтп = 2,5 [5].
.3.2 Выбор трансформатора
Тиристорный преобразователь комплектного электропривода подключается с использованием согласующего трансформатора или применяется бестрансформаторный вариант подключения.
Для правильного определения способа подключения преобразователя к сети следует определить необходимые значения фазного и линейного напряжений, обеспечивающие требуемое значение напряжения Uн. тп.
В силовых схемах современных тиристорных
преобразователей используются трехфазные мостовые (6-пульсные) схемы
выпрямления. В этом случае действующие значения фазного U2ф
и
линейного напряжений питания преобразователей должны удовлетворять условиям:
 (2.11)
(2.11)
где KR = (1,02-1,05) - коэффициент, учитывающий падение напряжения в элементах преобразователя; Kс = 0,9 - коэффициент, учитывающий допустимое (в соответсвии с ГОСТ 13109-97) длительное отклонение напряжения сети;
Kсх. ф = 2,34;
Kсх.л = 1,35 - коэффициенты схем выпрямления по напряжению;
Uн. тп - номинальное напряжение преобразователя.
Поскольку найденные значения существенно отличаются от номинальных напряжений сети, следует использовать согласующий силовой трансформатор.
Для выбора трансформатора определяется необходимый фазный ток I2ф во вторичной обмотке и габаритная (номинальная) мощность трансформатора.
Требуемый фазный ток I2ф
определяется согласно выражению:
![]() (2.12)
(2.12)
где Iн. тп - номинальный ток преобразователя; Kсх. т = 0,817 - коэффициент схемы выпрямления по току.
![]()
Габаритная мощность трансформатора вычисляется
по формуле:
![]() (2.13)
(2.13)
![]()
Расчетная мощность трансформатора превышает 250 кВА, следует принимать первичное напряжение равным 6 или 10 кВ.
Используя справочник [2], выбираем трехобмоточный трансформатор:
ТМП - 6300/10У2(20):
Sт = 5090 кВА,
I2ф = 3270 А,
U1н = 10000 В,
Uk = 6,5% (напряжение короткого замыкания «двух частей с разной схемой включения»),
Ikз
=
1%
![]()
(номинальное значение фазного тока на первичной стороне),
Pкз = 30000 Вт (мощность потерь короткого замыкания).
.3.3 Уточнение параметров двигателя постоянного тока
При подключении преобразователя к
сети с помощью согласующего силового трансформатора, индуктивность, вносимую в
якорную цепь трансформатора, можно определить по формуле:
![]() (2.14)
(2.14)
где xт - индуктивное сопротивление трансформатора, приведенное к вторичной стороне.
Для вычисления индуктивного
сопротивления xт вначале
определим полное сопротивление обмоток трансформатора:
![]()