Материал: Синтез регулятора скорости
Вычислим активное сопротивление
обмоток трансформатора по его паспортным данным:
Пересчитаем на нагретое состояние:
![]()
![]()
Тогда
![]()
Для мощных двигателей постоянного тока
допустимый уровень пульсаций тока принимают равным: Iпульс
= 0,05∙Iн. тп
= 0,05∙4000 = 200 А. Для ограничения пульсаций тока на уровне Iпульс
при
номинальной скорости и 12-пульсном выпрямлении требуемая суммарная (полная)
индуктивность якорной цепи определяется из условия:
![]() (2.15)
(2.15)
где Ed0 - среднее
выпрямленное значение ЭДС преобразователя при углах управления, близких к нулю;
p = 6 -
пульсность мостовой схемы выпрямления; fс = 50 Гц -
частота сети.
![]()
Необходимо, чтобы суммарная индуктивность якорной цепи двигателя была не меньше требуемой.
В состав индуктивности якорной цепи
входят индуктивность обмотки якоря двигателя и индуктивность, вносимая
трансформатором:
Lсумм = La + Lт = ![]() +
+ ![]() = 0,01665
Гн.
= 0,01665
Гн.
Включение дополнительного
сглаживающего дросселя не требуется.
Rсумм = Ra+ Rт = ![]() +
+ ![]() = 0,01279
Ом.
= 0,01279
Ом.
Уточним электромагнитную постоянную
времени:
Ta = Lсумм/Rсумм.
Ta = 0,01665 /0,01279 = 1,3 с.
Определим постоянную времени Tм:
![]()

где Jм - момент инерции условного механизма, Jм = 4∙J,
где J - динамический момент инерции двигателя (J = 63,5∙103 Н∙м),
Запишем основные параметры
структурной схемы заданной части в виде таблицы:
Таблица 2.3
|
Tμ, c |
Kтп |
Ra, Ом |
Ta, c |
CФн, Вб |
Tм, с |
Kт, Ом |
Kc, Вб |
|
0,02 |
105 |
0,01279 |
1,3 |
94,21 |
0,078 |
0,0009937 |
0,61 |
Рис. 3. Структурная схема заданной части
3. Синтез системы подчиненного
регулирования
Система содержит перекрестную связь. При синтезе системы подчиненного регулирования этой связью пренебрегают на первом этапе, т.е. как бы исключают. После завершения синтеза контура тока система может дополниться связями, учитывающими влияние исключаемой обратной связи.
В каждом контуре объект управления имеет две постоянные времени, одна из этих постоянных - малая постоянная времени, некомпенсируемая, вторая большая и компенсируемая. Во внутреннем контуре малой постоянной времени всегда считается Tμ, а большая Ta.
.1 Синтез регулятора тока
Рис. 3. Контур тока
Каждый контур настраивается так, чтобы было
колебательное звено с фиксированной γ.
![]()
Используется последовательная
коррекция, метод ЛЧХ (метод синтеза) с заданным видом желаемой характеристики.
![]()
После разрыва обратной связи:

Приравняем ее желаемой:
Изобразим систему после завершения синтеза (рис. 3.2):
Из структурной схемы следует, что форсирующая
часть регулятора математически компенсирует большую постоянную времени Ta.
Для обеспечения этой форсировки тиристорный преобразователь должен иметь запас
по напряжению.
Рис. 4
3.2 Компенсация обратной связи по противоЭДС
Также наша система нуждается в положительной
обратной связи по противоЭДС, вводимой на вход регулятора тока, т. к. [4, c.
11] Tм =
0,078 с, а электромагнитная постоянная времени Ta
=
1,3, поэтому Tм <
4∙Ta
(см. рис. 3.3).
Рис. 3.3 Компенсация противоЭДС
В ходе преобразований получим:

Такая передаточная функция физически
нереализуема, порядок числителя больше порядка знаменателя. Используем
минимальную реализацию, оставив в числителе минимальный порядок.
Тогда структурная схема заданной
части примет вид (рис. 3.4). Такая положительная обратная связь обеспечивает
приближенную компенсацию влияния противоЭДС в переходных режимах и точную
компенсацию в установившихся режимах.
Рис. 5
По заданию на курсовой наша система
астатическая, астатизм второго порядка. Для повышения порядка астатизма вводят
интегратор в ее структуру, но в этом случае не будет запаса по фазе. Для
обеспечения устойчивости системы одновременно с интегратором в передаточную
функцию регулятора скорости надо ввести форсирующее звено первого порядка.
Поэтому регулятор скорости - это ПИ-звено.
Приведем схему синтезированной системы автоматического управления:
Рис. 6. Схема синтезированной САУ
однозонный автоматизированный цифровой регулятор
4. Аналоговые системы автоматизированного управления
.1 Запасы устойчивости аналоговой
САУ
В программе Matlab
6.5. соберем схему для определения запасов устойчивости.
Затем в командной строке запишем команду для
нахождения запасов устойчивости:
W = logspace(0,6)
[A,B,C,D] = linmodv5('model');=
ss(A,B,C,D);(W)
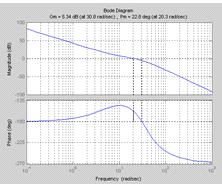
По графикам ЛАЧХ и ЛФЧХ найдем запасы
устойчивости:
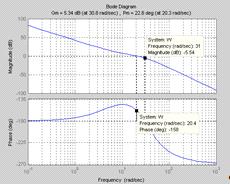
Запасы: ![]() ,
, ![]() ;
;
4.2 Исследование показателей качества САУ
Для этого в программе Matlab 6.5
собираем модель синтезированной САУ:
Рис. 7. Модель синтезированной САУ
Чтобы получить графики ω(t),
i(t)
изменения во времени угловой скорости вращения и тока якоря двигателя при
подаче на вход САУ единичного ступенчатого воздействия, воспользуемся элементом
Scope библиотеки Sinks.
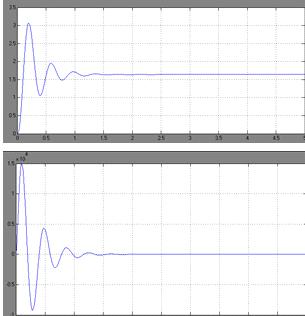
График ω(t)
представлен на (рис. 4.6):
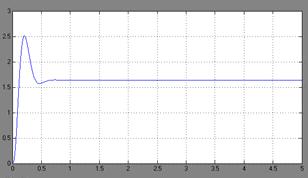
Рис. 8. График зависимости от времени угловой
скорости вращения якоря двигателя
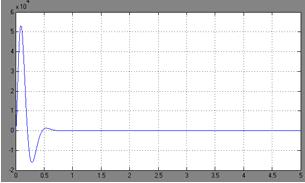
Рис. 9. График зависимости от времени тока якоря
двигателя i(t)
По графику ω(t)
было установлено ωmax
= 2,5,
ωуст
=
1/Kс =
1/1,12 ≈ 1,639 (установившаяся ошибка)
Перерегулирование:
![]()
Затем, установив 5% зону (рис.
4.7.), найдем tр:
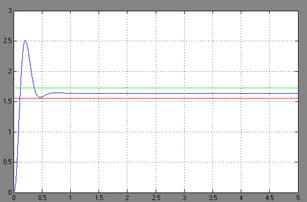
Рис. 10. График ω(t)
с 5%-ной зоной
Время регулирования - tр = 0.385 с.
Найденные показатели качества не соответствуют
тем, которые были обозначены в задании (σ = 0.1 с,
tр =
0.03 с). Попробуем выбрать постоянную времени тиристорного преобразователя Tμ
=
0.002 c. Поставим на вход
системы фильтр, передаточная функция которого выглядит так:
где T - постоянная времени фильтра, выбираемая произвольно.
На рис. 11 представлена измененная модель:
Рис. 11. Модель измененной САУ
График процесса изменения скорости вращения
якоря во времени:
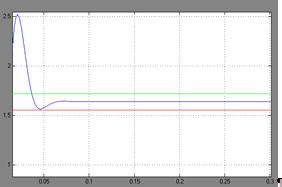
Рис. 12. График ω(t)
При параметрах системы: Tμ
=
0.002 c и T
= 0.000005 (постоянная времени фильтра) время регулирования tр
=
0.0365 с, а перерегулирование:
![]()
При большой постоянной времени T = 0.1 c получаем: σ = 0, а tр = 0,298 с
(см. рис. 4.10)
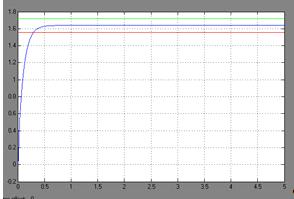
Рис. 13. График ω(t) при
большой постоянной времени фильтра
Как видим, и в том, и другом случае не удается одновременно достичь необходимых показателей качества: σ = 0,1, tр = 0,04 с. Либо улучшаем перерегулирование введением фильтра с большой постоянной времени, но ухудшаем быстродействие - tр, либо наоборот. Это противоречие отнесем к одним из недостатков этой модели.
В первую очередь, получим нужное перерегулирование, поскольку tр для нашего двигателя (tр = 0.04 с) - весьма жесткое условие.
График электромеханической ω(i)
характеристики:
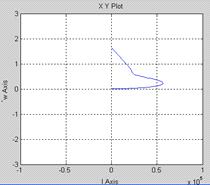
Рис. 14. График ω(i)
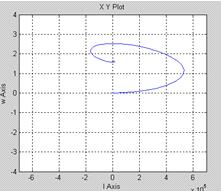
Рис 15. Электромеханическая характеристика без
фильтра
Построим графики ω(t), i(t),
представляющие собой реакцию САУ на ступенчатое приложение нагрузки  , и
соответствующей электромеханической характеристики ω(i).
, и
соответствующей электромеханической характеристики ω(i).
По заданию на курсовой: ![]() Значит, Iс = 0,7 ∙3650
А = 2555 А, схема модели представлена ниже:
Значит, Iс = 0,7 ∙3650
А = 2555 А, схема модели представлена ниже:
Рис. 16. Модель САУ при ступенчатом приложении
нагрузки Ic/p.
Построим графики ω(t)
и I(t):
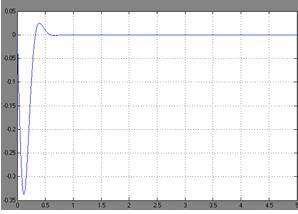
Рис. 17. График ω(t)
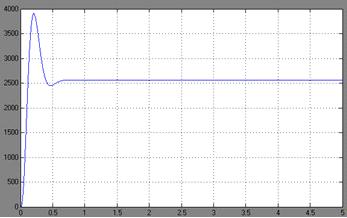
Рис. 18. График I(t).
По данным графиков устанавливаем, что установившаяся ошибка по возмущению по скорости равна 0, а установившаяся ошибка по возмущению по току
ef
= - 2480 А, что практически соответствует значению Iс
=
2555А.
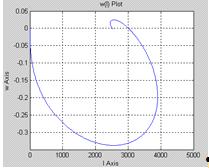
Рис. Элетромеханическая характеристика
Подадим на вход системы помеху:
h(t) = a1sinω0t + a2sina3ω0t,
a3 = 5, ω0 = 14 рад/с.
Построим графики ω(t),
i(t),
ω(i).
Схема модели:
Рис. 19. Модель САУ при подаче на вход помехи
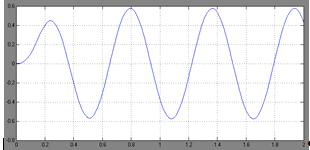
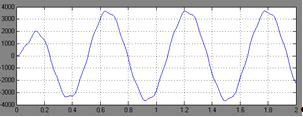
Рис. 20. Графики i(t),
w(t)
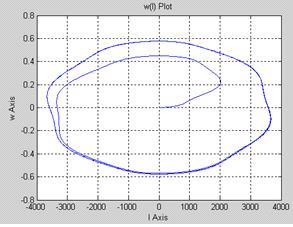
Рис. 21. График ω(i)
Приведем те же характеристики но с фильтром:
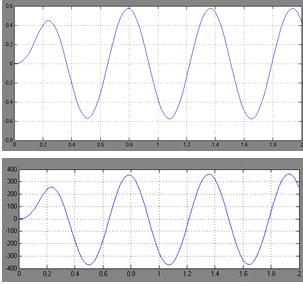
Рис. 22. Графики i(t),
w(t)
с фильтром
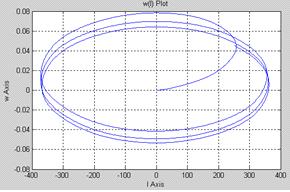
Рис. 23. График ω(i)
5. Синтез цифрового регулятора
скорости
5.1 Реализация регулятора скорости в
цифровой форме
Реализация регулятора скорости в цифровой форме
соответствует замене передаточной функции Wpc(p)
в аналоговой форме передаточной функцией Wpc(z)
в дискретной форме. Передаточная функция регулятора скорости, синтезированного
методом СПР:
![]()
Аппроксимируем эту передаточную
функцию в следующем виде:
Множитель X
необходим для построения правильных переходных процессов в Matlab
6.5. Теперь используем билинейное преобразование в соответствии с подстановкой:
где ![]()
Таким образом, мы синтезировали два цифровых регулятора из одного аналогового, п.ч. использовали разные методы подстановки. Далее по плану, используя программу Matlab 6.5 исследуем свойства системы автоматического управления с применением этих цифровых регуляторов. План исследований соответствует 4:
1. Определение запасов устойчивости.
2. Построение графиков ω(t), i(t) изменения во времени угловой скорости вращения и тока якоря двигателя при подаче на вход САУ единичного ступенчатого воздействия.
3. По кривой ω(t) (переходной функции САУ) определить перерегулирование - σ и время регулирования - tр.
4. Представление результата расчета в виде динамической электромеханической характеристики ω(i).
5. Построение графиков ω(t), i(t),
представляющих собой реакцию САУ на ступенчатое приложение нагрузки ![]() , и
соответствующей электромеханической характеристики ω(i).
, и
соответствующей электромеханической характеристики ω(i).
. Определение установившейся ошибки.
. Построение графиков ω(t), i(t) и характеристики ω(i) при подаче на вход САУ помехи.
5.2 Исследование показателей качества цифровой САУ
С помощью программы Matlab 6.5.
соберем модель исследуемой цифровой
системы, когда цифровой регулятор скорости получен при подстановке ![]() в исходный
аналоговый (рис. 5.2):
в исходный
аналоговый (рис. 5.2):
Рис. 24. Модель САУ с цифровым
регулятором скорости, реализованным с помощью подстановки p = z - 1/T∙z
Определим запасы устойчивости
системы:
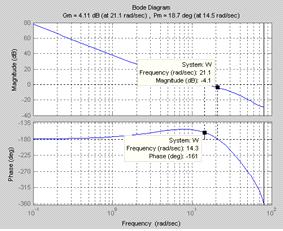
Рис. 25. Запасы: ![]() ,
, ![]() ;
;
Построим графики ω(t), i(t):