Материал: Синтез механизмов
а) |
б) |
Рис. 1
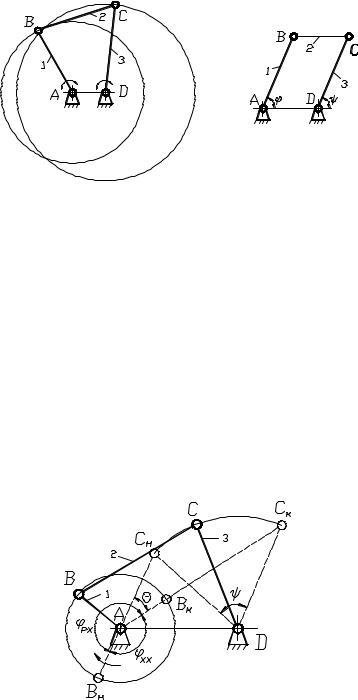
Частным случаем является механизм шарнирного параллелограмма (рис. 1, б), у которого АВ = СD и ВС = АD, углы поворота ведомого ψ и ведущего ϕ звеньев будут равны в любом положении, т.е. звенья 1 и 3 вращаются с одинаковой скоростью и передаточное отношение U13 постоянно и равно единице.
Шарнирный четырёхзвенник будет двухкривошипным, если межцентровое расстояние AD будет меньше длины любого подвижного звена, а сумма межцентрового расстояния и длины наибольшего из подвижных звеньев будет меньше суммы длин двух других звеньев.
Кривошипно-коромысловый механизм (рис. 2) применяется для преобразования непрерывного вращения ведущего звена
– кривошипа 1 в возвратно-вращательное движение ведомого звена – коромысла 3 и наоборот. Крайние положения механизма наступают, когда кривошип АВ и шатун ВС располагаются на одной прямой.
Перемещение коромысла из одного крайнего положения CнD в другое CкD происходит при повороте кривошипа на угол ϕрх , а обратный ход коромысла – во время поворота кривошипа на угол ϕхх . Углы ϕрх и ϕхх называют фазовыми
углами соответственно прямого (рабочего) и обратного (холостого) ходов.
Так как ϕрх > ϕхх на величину 2θ, то при равномерном вращении кривошипа скорость выходного звена на рабочем
ходу будет меньше чем на холостом. Направление вращения кривошипа следует выбирать так, чтобы из начального положения он двигался в сторону угла рабочего хода. Отношение фазовых углов называется коэффициентом изменения средней скорости выходного звена:
|
ϕрх |
|
180° + θ |
Рис. 2 |
|
||
K = |
= |
. |
(1) |
||||
|
|
|
|||||
ϕхх |
180° − θ |
||||||
|
|
|
|
||||
Значение K может изменяться от 1 до 2. Из формулы (1) можно определить угол смещения θ:
θ = 180° |
K − 1 |
. |
(2) |
|
|||
|
K + 1 |
|
|
Условие существования кривошипа в шарнирном четырёхзвеннике выражает теорема Грасгофа, согласно которой, наименьшее звено является кривошипом, если сумма длин наименьшего и наибольшего звена меньше суммы длин двух других звеньев.
Двухкоромысловый механизм (рис. 3) применяется для передачи вращения с одного звена на другое, но с ограниченным (до 90°, реже до 120°) углом поворота каждого звена.
Передаточное отношение двухкоромысловых механизмов переменно и зависит от размеров звеньев. Оно бывает положительным (звенья вращаются в одну сторону) рис. 3, а, и отрицательным (звенья вращаются в противоположные стороны) рис. 3, б.
Шарнирные четырёхзвенники часто используют для воспроизведения определённых траекторий движения (рис. 4). Форма траектории точки М шатуна (шатунная кривая) зависит от размеров звеньев механизма и координат точки М. Путём
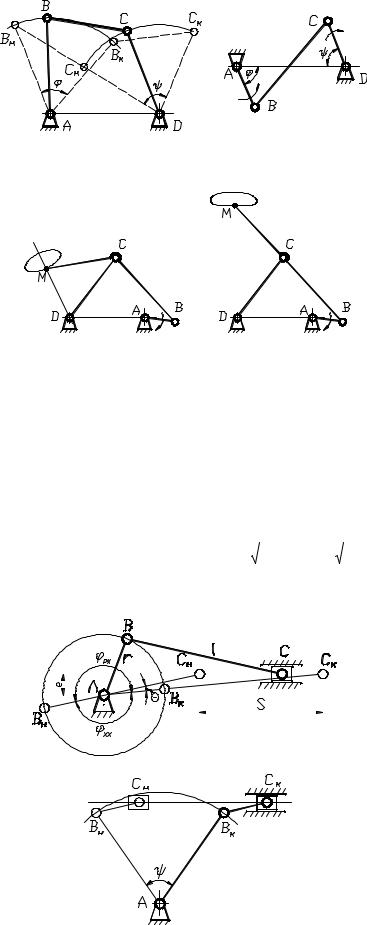
их подбора можно получить шатунную кривую, которая будет отличаться от заданной не более чем на допустимое отклонение . Если заданная кривая является дугой окружности, то механизм называется – круговой направляющий, если прямой, то прямолинейно-направляющий (прямило).
а) |
б) |
Рис. 3
Рис. 4
1.3. СВОЙСТВА КРИВОШИПНО-ПОЛЗУННОГО МЕХАНИЗМА
Кривошипно-ползунный механизм (рис. 5) применяется для преобразования вращательного движения кривошипа в возвратно-поступательное движение ползуна и наоборот. Смещение центра вращения кривошипа А относительно оси ползуна называется эксцентриситетом (е). При этом механизм называется дезаксиальным. Если е = 0 , то фазовые углы ϕрх = ϕхх = 0 и механизм называется аксиальным. Крайние положения данного механизма определяются аналогично
кривошипно-коромысловому механизму.
В дезаксиальном кривошипно-ползунном механизме фазовые углы ϕрх и ϕхх отличаются от 180°, но практически не
более чем на 30°, т.е. значение коэффициента K не более 1,5.
В общем случае для кривошипно-ползунного механизма ход ползуна:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S = |
(l + r )2 − e2 |
− |
(l − r )2 − e2 |
. |
(3) |
||||||||
Условие проворачиваемости кривошипа выражается следующим неравенством: |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ВС > AB + e . |
(4) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5
Рис. 6
Если неравенство не выполняется, то механизм будет коромыслово-ползунным (рис. 6). Такие механизмы применяются для преобразования вращательного движения в поступательное и, наоборот, при ограниченном движении звеньев.
1.4. УСЛОВИЯ ПЕРЕДАЧИ СИЛ В РЫЧАЖНЫХ МЕХАНИЗМАХ
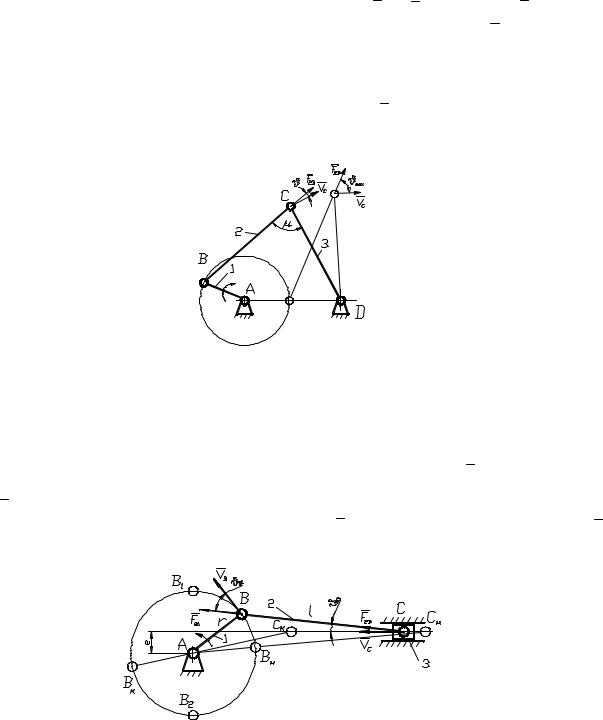
При проектировании рычажных механизмов необходимо учитывать важный параметр, характеризующий условия передачи сил и работоспособность механизма – угол давления ϑ . Углом давления называют острый угол, между направлением вектора движущей силы, приложенной к ведомому звену, и вектором скорости точки её приложения.
Вшарнирном четырёхзвеннике угол давления ϑ образован векторами F23 и VС (рис. 7). Сила F23 , действующая со стороны шатуна 2 на коромысло 3, направлена вдоль шатуна. Направление скорости VС точки С коромысла перпендикулярно звену 3. Угол μ, дополняющий угол давления до 90° называется углом передачи: μ = 90 − ϑ .
Вшарнирном четырёхзвеннике ϑ достигает экстремальных значений при внешнем и внутреннем положении механизма, т.е. когда кривошип АВ совпадает с линией центров (рис. 7).
Вкривошипно-ползунном механизме (рис. 8), при ведомом ползуне, сила F23 передаётся на него с углом давления ϑ23 .
Очевидно, что максимальные значения угол давления ϑ23 получает в положениях, когда кривошип перпендикулярен к направлению движения ползуна (точка В в положениях В1 и В2).
|
|
|
|
Рис. 7 |
|
|
|
С |
увеличением |
эксцентриситета е уменьшается угол давления ϑ23 во время рабочего |
хода (В в положении В1, |
||||
ϑ23 max |
= arcsin |
r − e |
), |
но при этом он возрастает на холостом ходу (В в положении В2, ϑ23 max |
= arcsin |
r + e |
), что бывает |
|
|
||||||
|
|
l |
|
|
l |
||
целесообразно, если нагрузки рабочего интервала значительно больше, чем холостого.
Для аксиального механизма ( е = 0 ) максимальное значение угла давления ϑ23 max = arcsin r . Следовательно чем меньше l
значение λ = l , тем меньше размеры механизма (по отношению к длине кривошипа, но больше углы давления). r
Если ведомым звеном будет кривошип, то сила со стороны шатуна F21 составит угол ϑ21 с вектором скорости VВ . При ϑ = 90° полезная составляющая силы приложенной к ведомому звену равна нулю, т.е. никакая
Рис. 8
сила не сможет привести его в движение. Это явление наблюдается в кривошипно-ползунном механизме с ведомым кривошипом, где угол давления ϑ21 два раза за цикл получает максимальное значение (точки Вн и Вк). Эти положения кривошип проходит только благодаря инерции жёстко связанных с ним вращающихся деталей.
При работе механизма угол давления не должен превышать допускаемого значения ϑmax ≤ ϑдоп . Увеличение ϑ
вызывает рост потерь на трение, снижение КПД и заклинивание механизма. При синтезе рычажных механизмов рекомендуют задавать для рабочих ходов углы давления ϑ ≤ 30°, а для холостых ходов ϑ ≤ 45°. Таким образом, при
проектировании механизмов угол давления является дополнительным условием синтеза (ограничением).
1.5. КИНЕМАТИЧЕСКИЙ СИНТЕЗ РЫЧАЖНЫХ МЕХАНИЗМОВ
После того как будет выбрана схема механизма, необходимо по заданным условиям определить размеры его звеньев. Эти условия очень разнообразны. Соответственно велико и число задач, связанных с проектированием механизмов, однако все их можно разделить на два типа:
1.Задача о воспроизведении заданной функции положения состоит в определении таких размеров звеньев механизма, при которых будет обеспечена заданная зависимость перемещения ведомого звена от перемещения ведущего. Задача о воспроизведении отдельных положений, скоростей и ускорений звеньев в этих положениях является частным случаем этой задачи.
2.Задача о воспроизведении заданной траектории состоит в определении параметров кинематической схемы механизма, в котором одна из точек звена, совершающего сложное движение, перемещается по заданной траектории. Например, задача синтеза направляющих механизмов.
Поскольку в любом рычажном механизме число параметров, подлежащих вычислению, ограниченно, для их определения достаточно иметь конечное число уравнений, равное числу неизвестных величин. Если согласно заданным условиям число уравнений меньше числа неизвестных, то задача имеет бесчисленное множество решений, из которых желательно выбрать наилучшее (например, вариант схемы механизма с меньшими углами давления).
1.5.1. Синтез кривошипно-коромыслового механизма
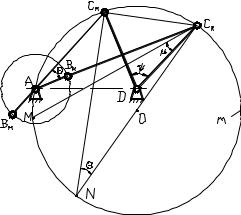
Наиболее часто при проектировании таких механизмов в качестве входных параметров задаются: длина коромысла R, угол размаха коромысла ψ и коэффициент изменения средней скорости коромысла K.
|
Рис. 9 |
|
|
|
|
На рисунке 9 отрезки DCн |
и DCк представляют собой построенные в масштабе μl , |
|
м |
начальное и конечное |
|
|
|
|
|||
|
|||||
|
|
|
мм |
|
|
положения коромысла. По формуле (2) определяется угол смещения θ . Проводится окружность m, которая является геометрическим местом вершин угла q = ÐСн ACк = ÐСн NCк , опирающегося на хорду CнCк.
Центр окружности О находится в середине гипотенузы Cк N прямоугольного треугольника CкCн N. Центр вращения кривошипа (точка А) выбирают на окружности m так, чтобы не получить в положениях Cн и Cк недопустимо больших углов
давления. Для этого из точки Cк проводят луч под углом передачи μ = 90 − ϑдоп |
к отрезку DCк. Пересечение |
луча с |
окружностью m даёт положение точки М. Опору А следует располагать на дуге МCн. |
|
|
Радиус кривошипа и длина шатуна определяется по формулам: |
|
|
r = 0,5(ACк - АСн ) ; |
l = 0,5(ACк + АСн ), |
(5) |
где длины АCк и АCн определяются из графических построений.
В спроектированном механизме необходимо проверить максимальный угол давления ϑmax (рис. 7).
1.5.2. Синтез кривошипно-ползунного механизма
Рассмотрим случай, когда в качестве входных параметров синтеза задаются: ход ползуна S, и коэффициент изменения средней скорости ползуна K.

Рис. 10
Угол смещения θ определяется по формуле (2). На оси х-х движения ползуна намечаем крайние положения шарнира CнCк (рис. 10). В точке Cн восстанавливаем перпендикуляр Cкn. При точке Cн откладываем угол 90 − θ и определяем положение точки М – одной из точек дуги, вмещающей угол θ. Проводим через точки CнМ и Cк окружность m, для которой отрезок CнМ является диаметром. Центром вращения звена АВ может быть выбрана любая точка дуги CнМCк , причём в зависимости от положения точки А будут меняться углы давления ϑ кривошипно-ползунного механизма.
После определения положения точки А рассчитываются размеры кривошипа и шатуна по формулам (5). Затем проверяют значения максимальных углов давления на рабочем и холостом ходу механизма (рис. 8).
2. КИНЕМАТИЧЕСКИЙ АНАЛИЗ РЫЧАЖНЫХ МЕХАНИЗМОВ
Любой механизм предназначен для преобразования движения входных звеньев в требуемые движения выходных звеньев. Эти движения описываются посредствам кинематических характеристик, которые включают координаты точек и звеньев, их траектории, скорости и ускорения. Целью кинематического анализа является определение кинематических характеристик механизма.
Число независимых друг от друга движений, которые совершаются механизмом равно числу его степеней свободы W и числу обобщённых координат, которые приписываются входным звеньям. Например, звено 1, вращающееся вокруг неподвижной оси, т.е. образующее со стойкой 0 вращательную кинематическую пару (рис. 11, а), имеет одну степень свободы, и его положение определяется одним параметром – угловой координатой φ.
а) |
б) |
|
Рис. 11 |
Звено перемещающееся поступательно относительно стойки (рис. 11, б) также имеет одну степень свободы и его положение определяется одним параметром – координатой S.
Функцией положения механизма называется зависимость углового или линейного перемещения выходного звена от времени или обобщённой координаты механизма.
Кинематическими передаточными функциями механизма называются производные от функции положения по
обобщённой координате. Первая производная называется первой передаточной функцией или аналогом скорости: |
|
||||||||||||||
линейной – |
V |
= |
|
dS |
, [м]; |
угловой – |
ω |
|
= |
|
dψ |
, [безразмерная]. |
(6) |
||
|
q |
|
|
dϕ |
|
|
q |
|
|
dϕ |
|
||||
|
|
|
|
|
|
|
|
|
|
||||||
Вторая производная называется второй передаточной функцией или аналогом ускорения: |
|
|
|
|
|
|
|
|
|||||||
линейного – |
aq |
= |
d 2 S |
, [м]; |
углового – |
εq |
= |
d 2ψ |
, [безразмерная]. |
(7) |
|||||
|
|
||||||||||||||
|
|
|
dϕ2 |
|
|
|
|
|
dϕ2 |
|
|||||
Кинематическими характеристиками механизма называются производные от функции положения по времени. Первая производная называется скоростью:
линейной – V = |
dS |
, [м/с]; |
угловой – ω = |
dψ |
, [c–1 ]; |
(8) |
|
|
|||||
|
dt |
|
dt |
|
||
вторая производная называется – ускорением: