Материал: Разработка микропроцессорной системы управления объектом
КР580 ВА86 представляет собой
8-разрядный формирователь, обеспечивающий ток нагрузки 32 мА. Формирователь
имеет выход с 3 состояниями управляется сигналами направлениями передачи и
отключения. Условно графическое обозначение шинного формирователя представлено
на рисунке 2.2:
Рис. 2.2 Шинный формирователь
Адаптер связи КР580 ВВ55 - (ППА) микросхема представляет собой программируемое устройство ввода-вывода параллельной информации, применяется в качестве элемента ввода-вывода общего назначения, сопрягающего различные типы периферийных устройств с магистралью данных систем обработки информации. Схема позволяет осуществлять обмен 8-разрядными данными по 3 каналам А, В, С. Направление обмена информации для каждого канала задаётся программно. Режимы работы микросхемы задаются при её начальной установки путём записи управляющего слова в регистр управления. Регистр С можно разделить на два 4-разрядных регистра ввода-вывода данных, к которым осуществляется доступ как к отдельным независимым регистрам.
Существует 3 режима работы каналов:
1. Режим 0-это простой ввод-вывод, при котором возможны синхронная программно-управляющая передача данных через 4 независимых управляемых порта,
2. Режим 1-позволяет осуществить обмен данными через каналы А и С с помощью сигналов управления, передаваемых по каналу С.
3. Режим 2-канал А используется для двунаправленной передачи данных, канал С для записи управляющих сигналов, обеспечивающих передачи данных по каналу А.
Интегральный таймер КР580ВИ53- трех канальное программируемое устройство (таймер), предназначенное для организации работы микропроцессорной системы в режиме реального времени.
Эта микросхема представляет собой программируемый 3 канальный таймер счётчик, вырабатывающий временные интервалы, управляемые программой. Три канала программируются и работают независимо друг от друга. Длительность интервалов может задаваться программно в 2-чной или 2-10 форме записи. Процесс формирования временных интервалов в каждом канале может управляться внешним сигналом, подаваемым на вход разрешения работы. Работа схемы тактируется до 2МГц.
Для каждого канала имеется возможность задания одного из 6 режимов. микропроцессорный управление оперативный постоянный
Режим 0-выдача сигнала прерывания по конечному числу“1”. сохраняется до тех пор, пока в канал не будет перезагружен режим работы или новое число: младший байт останавливает текущий счёт, старший байт начинает новый счёт.
Режим 1-программирует ждущий мультивибратор. Выход канала после загрузки числа в счётчик устанавливается в “0”, после первого тактового сигнала. Одновременно начинается счёт, и при достижении конечного числа на выходе устанавливается уровень “1”.
Режим 2-генератор тактовых сигналов. На выходе канала через заданное число периодов тактовой частоты появляется “0” длительностью в один период тактовой частоты. Число периодов определяется числом, записанным в счётчик канала. Так как после установки режима работы канала, сигнал на выходе “1” до окончания загрузки счётчика, то можно осуществлять программную синхронизацию.
Режим 3-генератор прямоугольных сигналов. На выходе канала будет высокий уровень в течении половины интервала времени и низкий в течении другой половины.
Режим 4-программно управляемый строб. На выходе канала появляется “1”, и когда на управляющий вход подается “1”, начинается счет и при достижении конечного числа на выходе устанавливается “0” длительностью в один период тактовой частоты.
Режим 5-строб с аппаратным запуском. Счетчик канала после загрузки начинает счет только по переднему фронту на управляющем входе. Если, во время счета на управляющем входе появится передний фронт сигнала, то счет будет начат сначала. Установка режима работы каналов осуществляется путем записи управляющего слова в регистр режим канала.
Рис. 2.4 Программируемый таймер
Оперативное запоминающее устройство К155РУ2
Микросхемы могут работать в режимах записи,
считывания и хранения информации. У микросхемы К155РУ2 доступ к накопителю (в
режиме записи или считывания) возможен только при соответствующих комбинациях
сигналов CS: CS1=0,
CS2=0,
CS3=1.
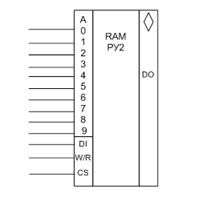
Рис. 2.5 ПЗУ Рис. 2.6
ОЗУ
ОЗУ предназначено для кратковременного хранения текущей информации, относящейся к решаемой задаче. В ОЗУ статического типа в качестве запоминающего элемента используются триггеры. Режим работы микросхемы задается сигналами, поступающими на управляющие входа со схемы управления.
Условно графическое обозначение микросхемы приведено на рисунке 2.5:
Постоянное запоминающее устройство К155РЕ3
ПЗУ предназначено для постоянного хранения
программы. Чтение информации из микросхемы задается сигналами, поступающими на
управляющие входы со схему управления.
3. Описание электрической
принципиальной схемы
При включении микропроцессорной системы, происходит начальная установка микропроцессора, в течение 3-4 тактов. После чего начинает выполняться моделирующая программа. Во время выполнения программы, процессор можно сбросить в исходное состояние, путем включения кнопочного переключателя S1(КН1). Выполнение программы можно прервать с помощью кнопочного переключателя S2(КН2), после его нажатия происходит выполнение прерывающей программы. Обмен информации производят, как дано по заданию, по общей шине.
Для синхронизации работы узлов используется генератор тактовых импульсов. Генератор формирует сигналы С1 и С2 с частотой 2МГц.
Для управления работой МПС вырабатывает управляющие сигналы: RD, WR, IORD, IORW.
Для ввода-вывода информации используется параллельно-периферийный адаптер (ППА) КР580ВВ55.
Программирование режима работы ППА производится следующим образом:
-управляющее слово.
Для настройки ППА следует записать команду:A, 92h- управляющее слово в накопитель.83h-запись в РУС.
Для выбора одного из каналов используются входы А0, А1 и выбор устройства (CS)-8 разрядом адреса через инвертор.
Порт А-80h, порт В-81h, порт С-82h, РУС-83h.
Для обращения к ППА как к ВУ подключаются входы WR, RD к IORD и IORW шины управления.
Для организации временных интервалов при работе МПС используется интервальный таймер КР580ВИ53. Процесс формирования временных интервалов в каждом канале будет инициализироваться внешними сигналами, подаваемые на вход разрешения работы.
Работа схемы тактируется сигналами внешнего генератора с частотой 2МГц. Входы А0, А1, используются для активизации одного из каналов или регистра управления, а выбор самого интервального таймера 8 разрядом адреса: СЧ0-00h, СЧ1-01h, СЧ2-02h, РУС-03h.
Режим работы микросхемы КР580ВИ53 задаются при
начальной установке. Каналы схемы полностью не зависят друг от друга, и каждый
может иметь свой режим работы. Интервальный таймер программируется таким
образом, что СЧ0 работает как делитель входной частоты. Это необходимо для
того, чтобы получить миллисекундный диапазон для выдачи У3. СЧ1 работает в
режиме 0, т.е. в режиме программируемой задержки, время задержки равно У3,
время задержки можно увеличить кнопкой КН3. СЧ2 работает в режиме 3, т.е. как
генератор прямоугольных импульсов, длительность периода равна У2.
4. Блок схема алгоритма и программа
Алгоритм - конечная последовательность точно определенных действий, приводящих к решению поставленной задачи. Причем алгоритм работы программы будет представлен на рисунке 4.1.
Рис. 4.1 Алгоритм работы программ
Причем в программе предусмотрен вызов функции по
прерыванию. Алгоритм функции прерывания представим на рисунке 4.2.
Рис. 4.2 Алгоритм работы функции вызываемой по
прерыванию
Так как в эмуляторе процессора не было возможности провести настройку таймера, я осуществил вывод в порт значения подсчитанного периода Y2.
Программа на языке ассемблер является пошаговой логической реализацией алгоритма. При написании программы разработчик должен использовать адреса только реально имеющихся ячеек.
После начальной установки начинается выполнение программы по заданному алгоритму. Вначале в указатель стека загружается адрес вершины стека, затем происходит переход на основную программу. Программируется ППА и вводятся значения Х и К, после чего разрешаются прерывания. Затем производятся вычисления значения У3, осуществляется программирование СЧ0 и СЧ1 интервального таймера и в СЧ1 загружается У3. После этого выполняется прерывание RST5 (для этого в эмуляторе процессора надо запустить программу на выполнение F6 и прерывание вызывать по F7, а дальне ввести номер прерывания), это прерывание вычисляет значение У2, который заносится в СЧ2 интервального таймера. После возвращения в основную программу, происходит вычисление У1 и У светодиодной индикации. Полученный байт выводится через порт C. После вывода байта происходит прием операндов: Х через порт А, К через порт В, программа возвращается на вычисление У1 и У. У2 вычисляется с новыми значениями Х и К, только после принудительного прерывания. У3 вычисляется один раз.
Листинг программы с пояснениями приведен в
приложении 2.
5. Карта распределения адресного
пространства памяти
Память - один из основных элементов устройства. Она организована как множество ячеек, в которых может храниться информация. Совокупность всех ячеек памяти, к которым может обратиться МП, составляет адресное пространство памяти. Информационная емкость одной ячейки составляет 8 бит или 1 байт.
Наибольший объем памяти, который может быть использован в устройстве, определяется объемом адресного пространства.
Важным этапом конструирования ЭВМ является
организация памяти, и поэтому при разработке программного обеспечения важно
внимательно провести распределение памяти. ПЗУ находится в области памяти с
0000 по FFh. ОЗУ
находится в области с 8000h
по A000h.
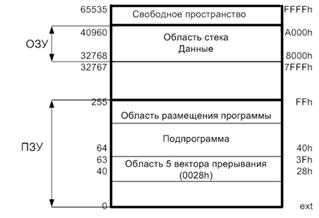
Рис. 5.1 Карта распределения адресного
пространства памяти
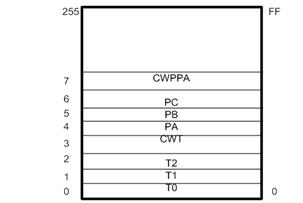
Рис. 5.2 Карта распределения УВВ
Адреса 0-255 отведенены под ПЗУ. По адресу 0h в ПЗУ размещена 1 команда JMP START. Диапозон по адресу 40 записана команда вызова подпрограммы PRER.
Диапазон УВВ - адреса 0-3 используются для адресации устройств ПИТ, 4-7 для адресации трех портов ППА - PA, PB,PC и регистра слова управления ППА
6. Оценка ёмкости ПЗУ и ОЗУ
Команды и данные необходимо хранить и выбирать по мере необходимости в процессе работы ЭВМ. Для этой цели применяют ЗУ. Их можно разделить на два типа: ОЗУ и ПЗУ. ПЗУ используется для хранения команд и констант. Запись в ПЗУ сложна и занимает много времени, поэтому этот тип памяти применяется в тех случаях, когда не требуется изменять записанную однажды информацию. В данном курсовом проекте выбрана из задания ПЗУ К155РЕ3 (32*8), а так как программа, реализующая алгоритм работы МПС занимает всего 198 байт (С6h), то нам достаточно 7микросхем, для лучшей совместимости и облегчения программирования возьмем 8 микросхем.
ОЗУ используется для хранения данных,
изменяющихся в процессе работы системы. Блок ОЗУ построен на основе 8 микросхем
КР155РУ2 (1к*1).
7. Расчет потребления тока
Таблица 7.1
Потребление тока
|
Тип м/c |
Колич-во (шт) |
Iпотр+5В (мА) |
Iпотр+12В (мА) |
Iпотр-5В (мА) |
||
|
КР580ВМ80А |
1 |
70 |
50 |
1 |
||
|
КР580ВК28 |
1 |
190 |
|
|
||
|
КР580ВИ53 |
1 |
140 |
|
|
||
|
КР580ВВ55 |
1 |
120 |
2 |
160 |
|
|
|
КР580ИР82 |
1 |
250 |
|
|
||
|
К580ГФ24 |
1 |
123 |
12 |
|
||
|
К155РУ2 |
8 |
140 |
|
|
||
|
К155РЕ3 |
8 |
138 |
|
|
Таким образом по данным таблицы ток потребления Iпотр. cоставляет:
· от источника +5В: 2609 мА.
· от источника +12В: 72 мА.
· от источника -5В: 1 мА.
ЗАКЛЮЧЕНИЕ
В процессе выполнения курсового проекта, была спроектирована схема микропроцессорной системы управления некоторым объектом. В пояснительной записке представлен подробный синтез структурной и принципиальной схемы.
Составлен алгоритм работы МПС, разработана программа обеспечивающая выполнение заданного алгоритма, также была распределена область памяти под ОЗУ и ПЗУ. Проведена организация оперативной и постоянной памяти.
Был произведен расчет потребления тока от источника питания. Был оформлен чертеж микропроцессорной системы в виде структурной и принципиальной схемы.
Данный проект может быть использован для
создания микроконтроллера автоматизированного управления удаленным объектом.
СПИСОК ЛИТЕРАТУРЫ
1. Лебедев О.Н. Применение микросхем памяти в электронных устройствах: Справ. Пособие.- М.: Радио и связь,1994.-216с.
2. Справочник Большие интегральные схемы ЗУ/ под редакцией Гордонова А.Ю., Дьяконова Ю.Н.
. Справочник Полупроводниковые БИС ЗУ / под редакцией Гордонова А.Ю., Дьяконова Ю.Н.
. Учебный микропроцессорный комплект: Техническое описание и руководство оператора.
. Каган Б.М. Электронные вычислительные машины и системы: Учеб. пособие для вузов.- 3-е изд., перераб. и доп.- М.: Энергоатомиздат1991.- 592 с.
. Шевкопляс
Б.В. Микропроцессорные структуры. Инженерные решения: Справочник.- 2-е изд.
перераб. и доп.- М.: Радио и связь, 1990.- 512 с.
ПРИЛОЖЕНИЕ 1
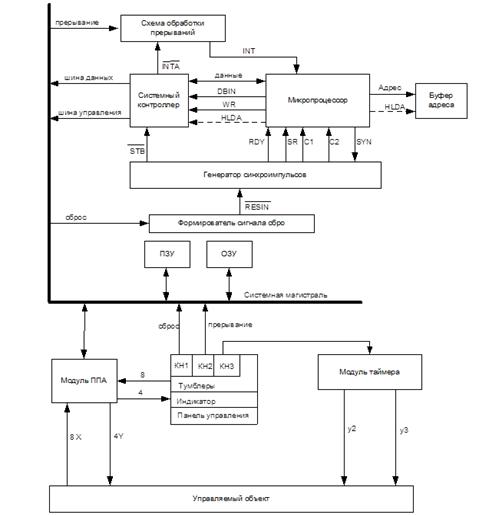
Структурная схема МПС
ПРИЛОЖЕНИЕ 2
Листинг программы:
Ассемблер K580.Файл: kurs.as
T0 EQU 0
T1 EQU 1EQU 2EQU 3EQU 4EQU 5EQU 6EQU 7EQU 409600START40PRER: LXI SP,STEAK
MVI A, 10010010B; Установка ППА в режим ввода по OUT CWPPA;
PA и PB и вывода по PC
call vvodXKy3:y1ledvvodXKbegin: a,01010000b;установка T1 ПИТ - реж. 0
out CWTa,c ;вычисление y3=2*max(x,k)bm1endy3: mov a,b3:add a
out T1 ;запись в регистр T1 зачения интервала
времени Y3=0a,00111110b; установка Т0 в - реж.
3CWTa,11101000b; запись в регистр Т0 числa
out T0 ; коэффициент деление
mvi a,00000011b ;равногоT0 ; 1000: in PPA ;ввод Х b,a; В рег. В сохраняем значение Х
in PPB;ввод К
mov c,a; В рег. С сохраняем значение А
ret
y1:mov a,c
add abm2endy1: mov a,b:add b 0fh ;выделение младшей тетрады
out PPC ;вывод в порт С
ret
:mov a,ccccd,aa,cb10hendl: mvi a,10h:sub d
ani 11110000b ;выделение старшей тетрадыPPC ;вывод в порт С
ret:pswbdha,bcd,aa,cbm4endr: mov a,b:add dd,aA,10111110b; ПИТ - реж. 3CWTa,dT2
hdbpsw